KEBA
RoboDKシミュレーションの準備ができたら、KEBAロボットコントローラで実行できるプログラム(KAIROファイル)をオフラインで生成することができます。
以下の手順に従って、ロボットシミュレーションからコントローラ用のプログラム(KAIROファイル)を生成してください:
1.プログラムを右クリックします。
2.ロボットプログラムの生成F6を選択します。その後、FTPでファイルを目的のプロジェクトに手動で転送します。
または、SFTP を設定した後、ロボットプログラムを生成 Ctrl+F6 を選択します。
3.ティーチングペンダントのプロジェクトタブで、refreshを押します。
4.プログラムをロードしてからメイン・ファイルをロード

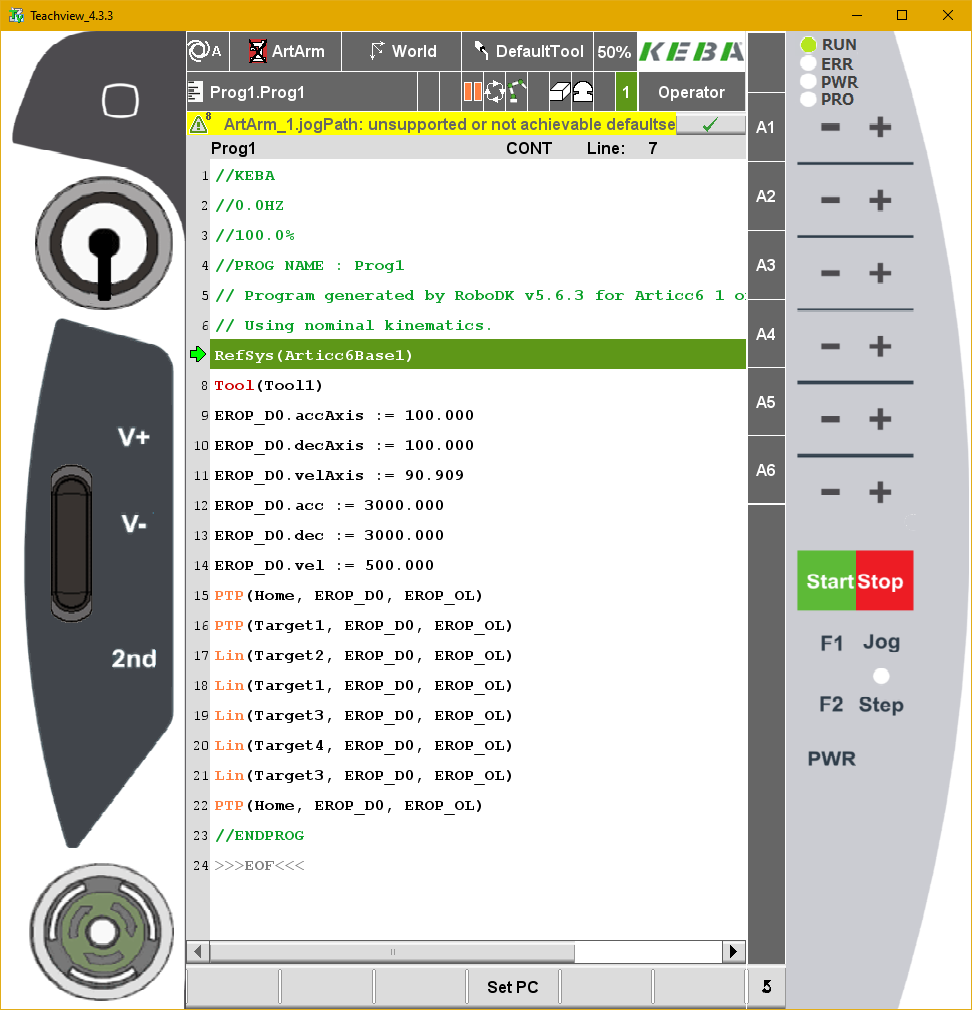
プログラムはテキストエディタで表示されます。RoboDKからプログラムを生成する方法については、ドキュメントのロボットプログラムのセクションを参照してください。
ヒント:異なるポストプロセッサの中から選択したり、プログラムの生成方法を定義するためにポストプロセッサをカスタマイズすることが可能です(例えば、グリッパーや外部センサーをサポートするため)。