KEBAコントローラー
KEBAコントローラはRoboDKから2種類の方法でプログラミングすることができます:KEBA KAIROポストプロセッサを使う方法とRoboDKドライバーを使う方法です。
KEBA KAIROポストプロセッサーを使うことで、RoboDKを使ってKEBAコントローラにロードできるKAIROファイルを得ることができます。これはKEBAロボットに使われているデフォルトのポストプロセッサを使うことで実現できます。また、FTPやUSBドライブを使ってスクリプトプログラムファイルを直接転送することもできます。
また、KEBAロボット用のドライバを使うことで、ロボットがコンピュータに接続されていれば、RoboDKからロボットのプログラムを実行することができます。
注意: KEBAコントローラ用RoboDKドライバが使用するRC-WEBAPIはKEBA KeControl FlexCore 4.6.1以降が必要です。
KEBAコントローラーIPの取得
RoboDKからプログラムを自動的に転送したり実行したりするにはKEBAコントローラのIPが必要です。ロボットのIPが正しいかどうかはブラウザでIPを入力してウェブインターフェースにアクセスすることで確認できます
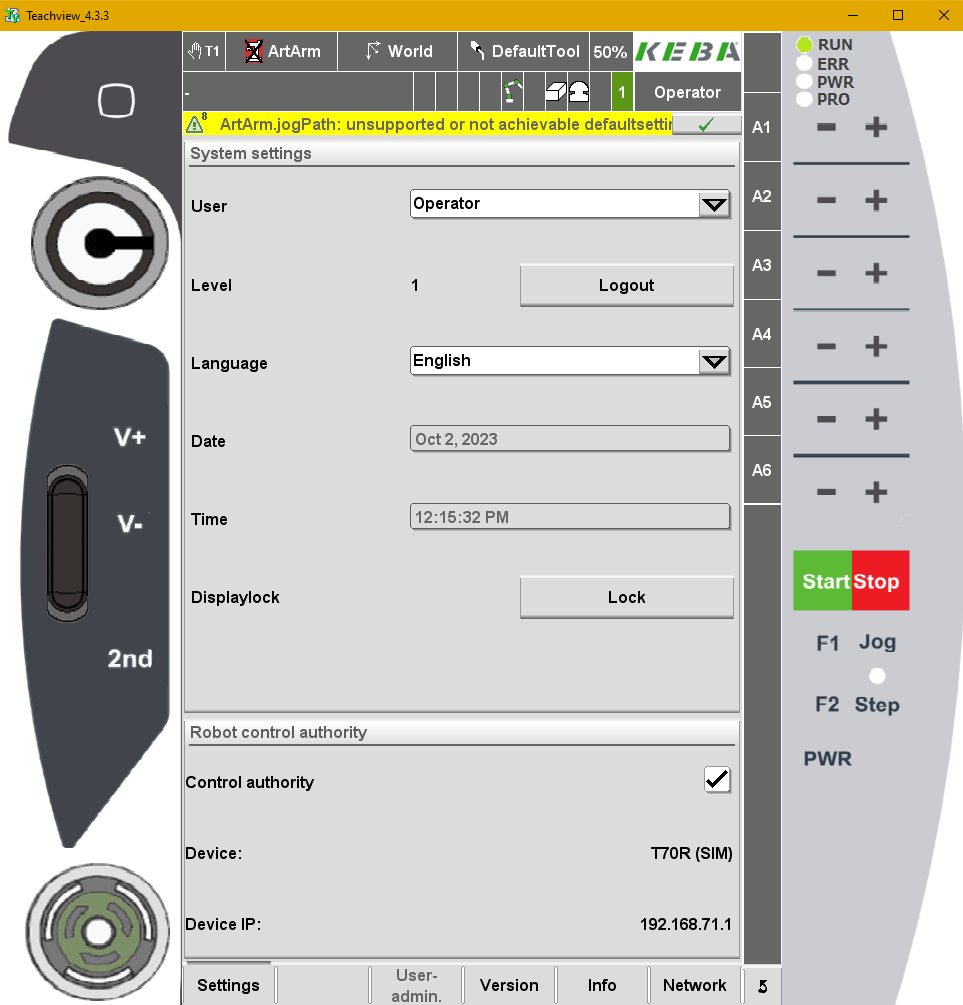
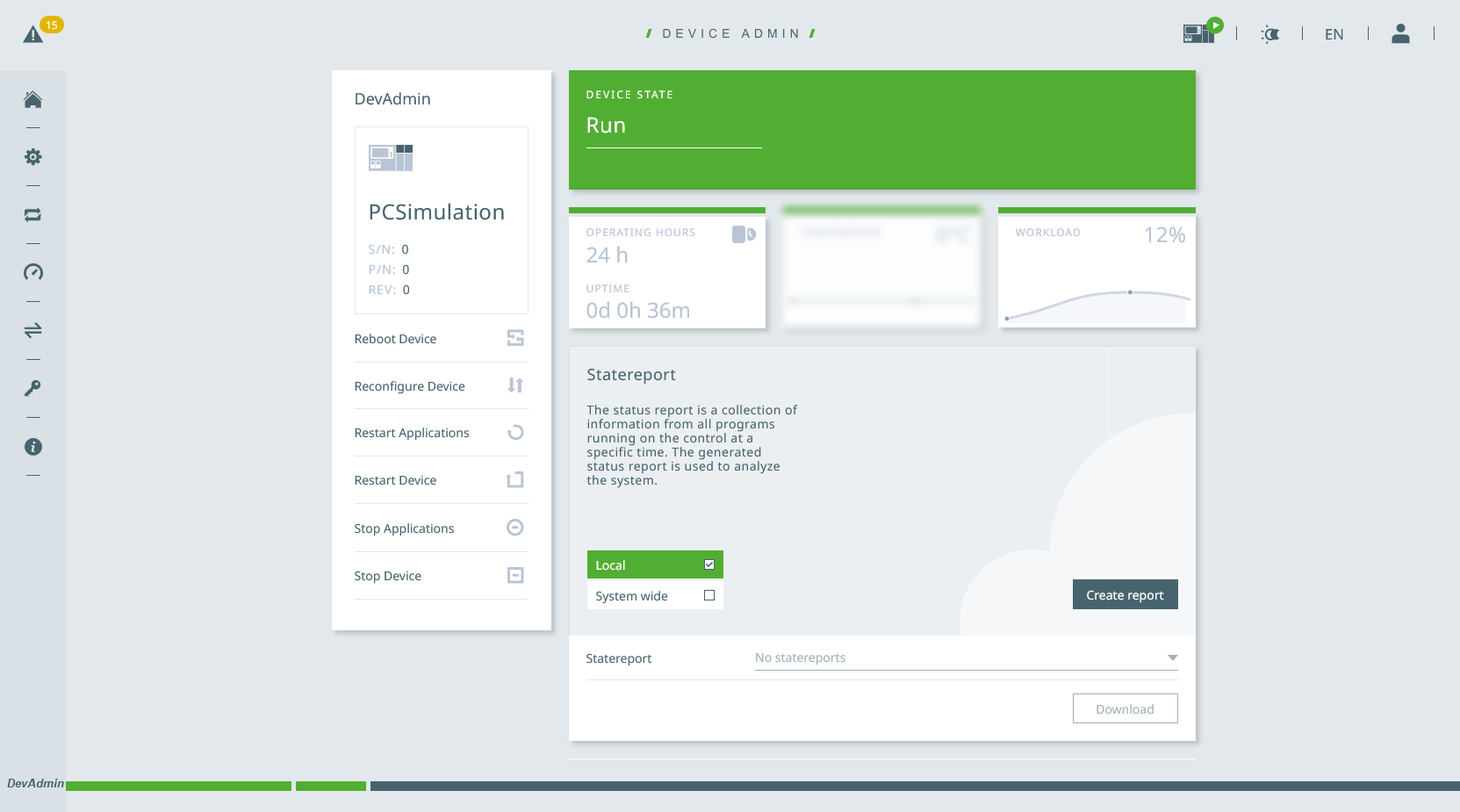
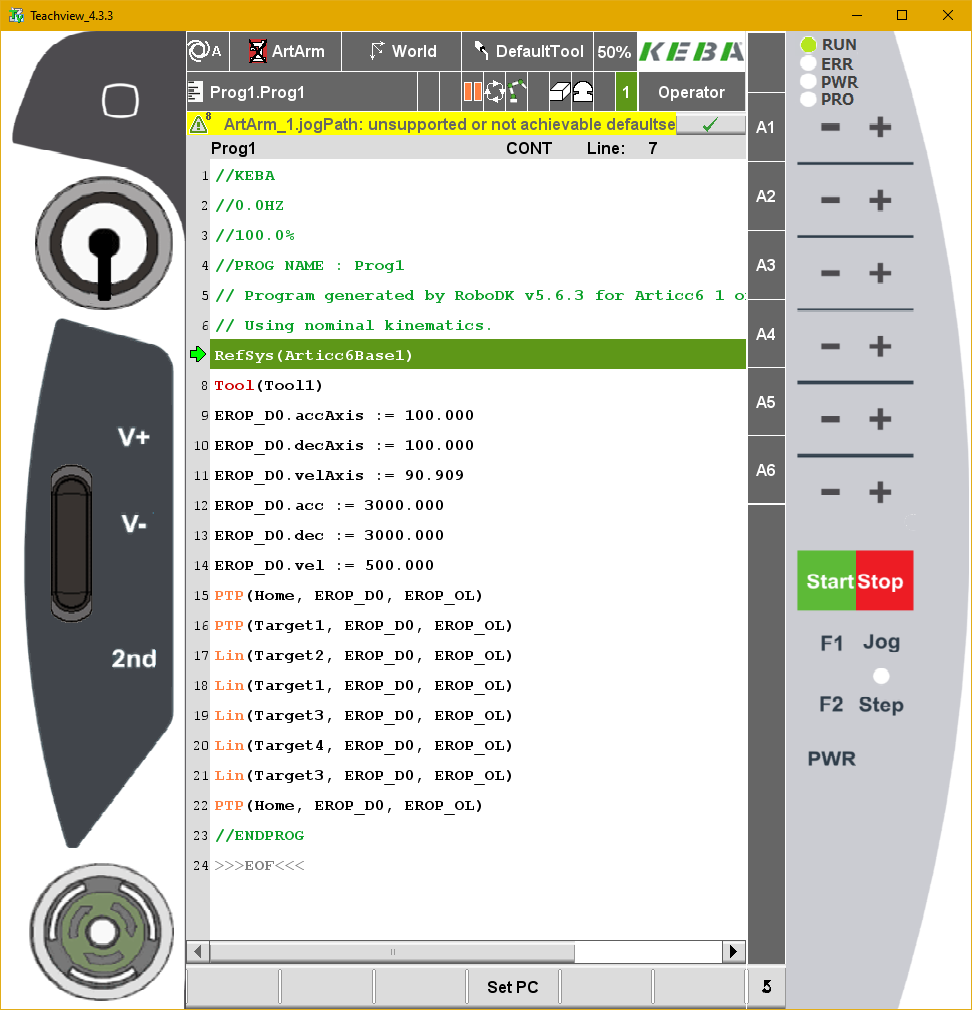
IPを取得するには、ティーチペンダントのサービスウィンドウに移動し、情報タブを選択します。
注:シミュレータを使用し、コントローラのローカルインスタンスに接続する場合は、IPとして127.0.0.1を入力するだけです。
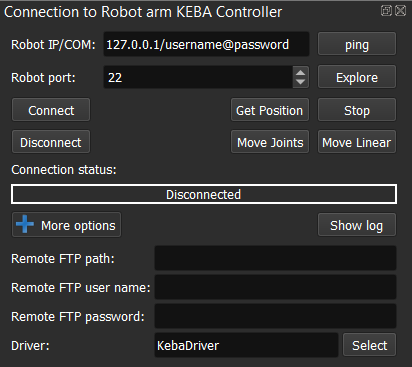
RoboDKに入力するIPアドレスのフォーマットはユーザー名とパスワードを含み、次のようにします: .127.0.0.1/username@password
注:ロボットはイーサネット接続(直接接続またはネットワーク経由)でコンピュータに接続されている必要があります。Pingテストではネットワークリンクが正しく確立されているかどうかをテストすることができます。KEBAコントローラーに接続するための有効なユーザー名とパスワードがあることを確認してください。
以下の画像は、コントローラ・ティーチ・ペンダントからコントローラIPを取得する方法を示しています。


以下の画像のように、ロボットのウェブインターフェイスが表示されない場合は、ネットワーク接続を適切に設定してください。
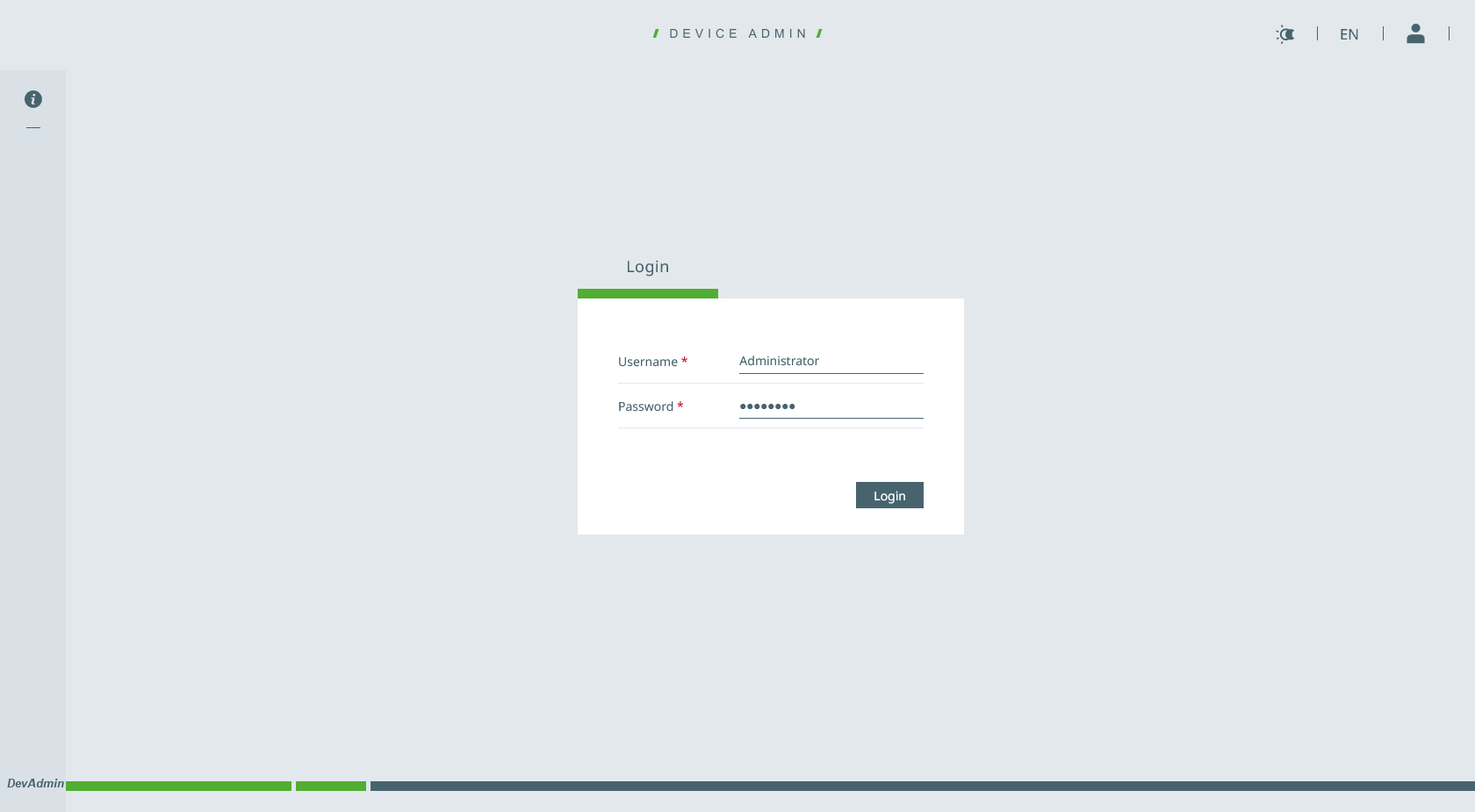
ロボットのウェブインターフェイスにログインするために使用したユーザー名とパスワードも必要です。
KEBAプログラムを実行
RoboDKシミュレーションの準備ができたら、KEBAロボットコントローラで実行できるプログラム(KAIROファイル)をオフラインで生成することができます。
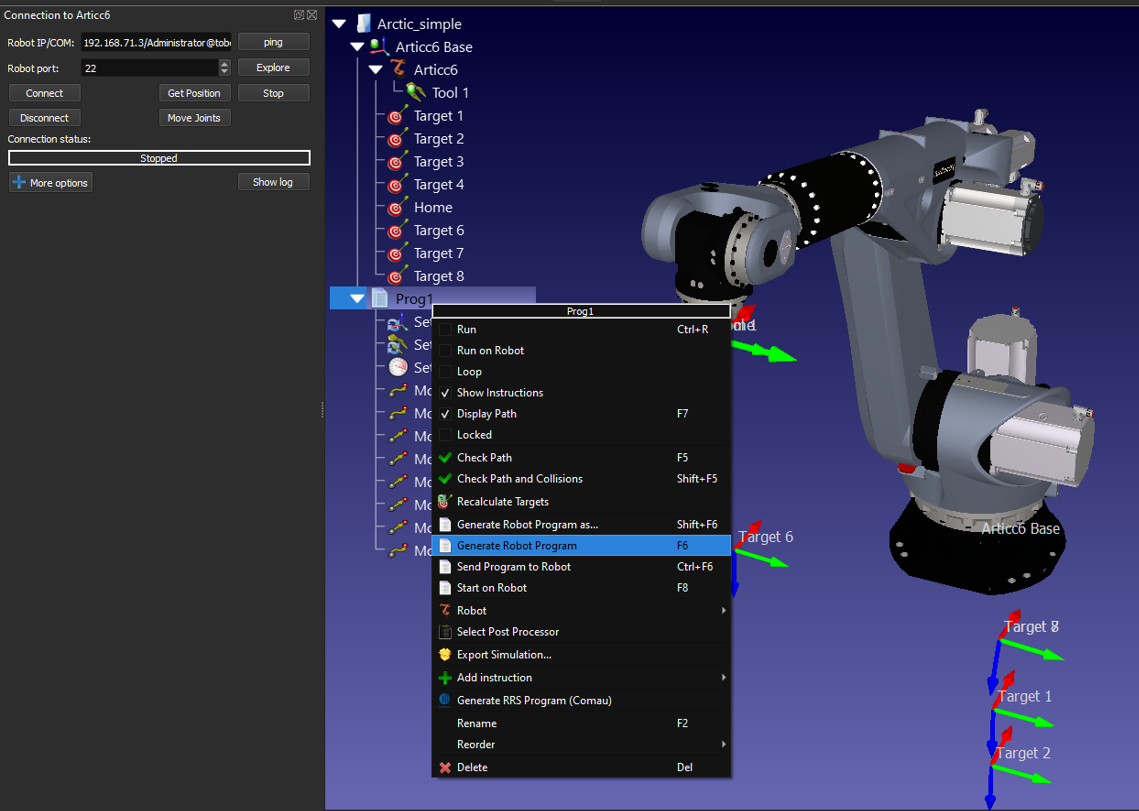
以下の手順に従って、ロボットシミュレーションからコントローラ用のプログラム(KAIROファイル)を生成してください:
1.プログラムを右クリックします。
2.ロボットプログラムの生成F6を選択します。その後、FTPでファイルを目的のプロジェクトに手動で転送します。
または、SFTP を設定した後、ロボットプログラムを生成 Ctrl+F6 を選択します。
3.ティーチングペンダントのプロジェクトタブで、refreshを押します。
4.プログラムをロードしてからメイン・ファイルをロード

プログラムはテキストエディタで表示されます。RoboDKからプログラムを生成する方法については、ドキュメントのロボットプログラムのセクションを参照してください。
RoboDKからのプログラム実行
ロボットドライバーは、オフラインプログラミング(プログラムを生成し、ロボットに転送して実行する方法)に代わる方法を提供します。RoboDKから直接ロボット上でシミュレーションを実行することができます(オンラインプログラミング)。ドライバについての詳細はロボットドライバのセクションをご覧ください。
以下の手順に従ってRoboDKからロボットに接続してください:
1.RoboDKでロボットを右クリックします。
2.選択してください:
3.ロボットのIPを入力してください。
4.接続を選択します。
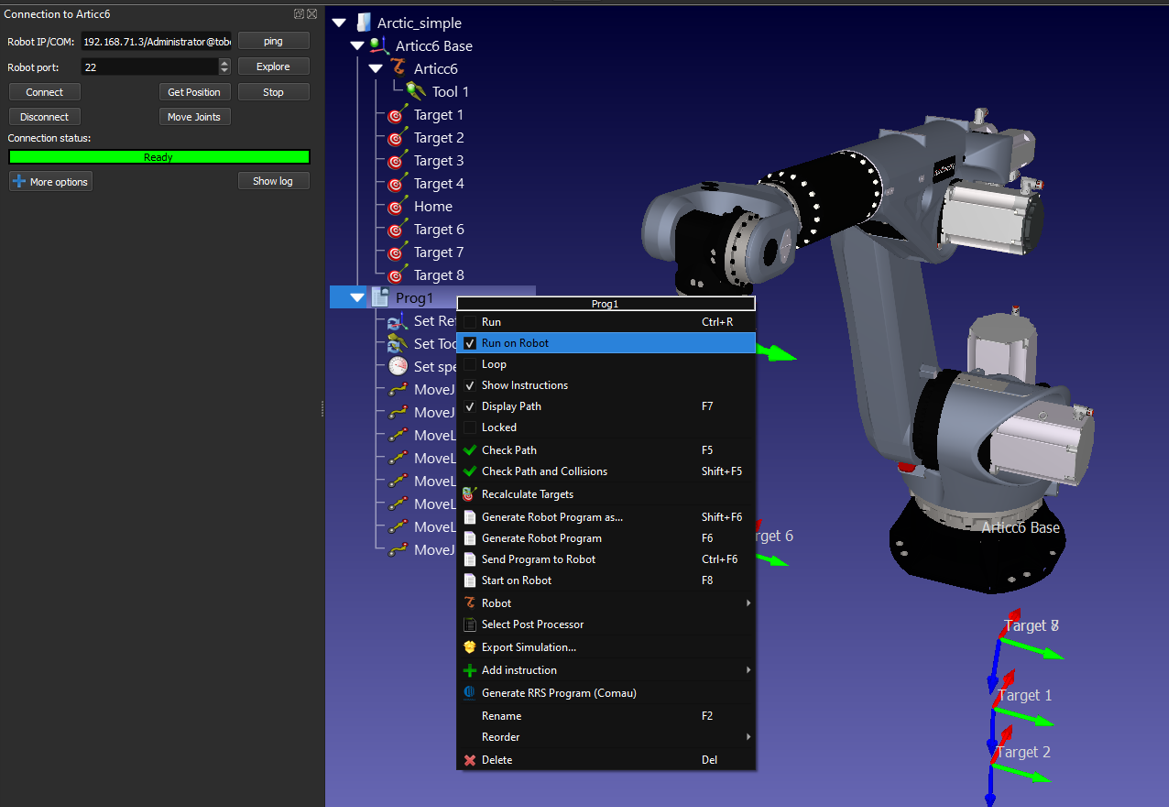
接続に成功すると、Readyという緑色のメッセージが表示されるはずです。そうでない場合は、IP、ユーザー名、パスワードが正しいことを確認してください。また、RoboDKのIPアドレスは前のセクションで述べたように正しくフォーマットしてください(127.0.0.1/ユーザ名@パスワード)。
注:接続に失敗した場合、コンピュータとロボット間のネットワーク接続が正しく確立されていることを確認してください。コンピュータのIPがロボットと同じネットワーク内にあることを確認してください。Windowsでは管理者権限が必要です。詳しくはドライバのトラブルシュートのセクションを参照してください。
ロボットの移動は、接続メニューからGet robot jointsを選択し、ロボットをジョグし、Move Jointsをクリックして接続メニューからロボットを移動します。
PCからロボットに直接プログラムを実行するには、プログラムのRun on robot有効にする必要があります。以下のステップでRun on robotオプションを有効にする方法を説明します:
a.プログラム(この例ではPrint3D)を右クリックします。
b.ロボット上で実行を選択
c.プログラムをダブルクリックして起動します(または右クリックして「ファイル名を指定して実行」を選択します)。
このようなロボットのプログラミング方法は、デバッグ目的には便利ですが、ロボットのプログラムを展開するには、前節で述べたようにオフラインでプログラムを生成する方がよいでしょう。
Run on robotオプションをチェックすると、プログラムをダブルクリック(または右クリック→Runを選択)するたびに実際のロボットに接続されます。
これらの操作はRoboDK APIからも利用でき、ロボットプログラミングを他のアプリケーションと統合することができます。APIはPythonやC#などのプログラミング言語で利用できます。
SFTPでPPKファイルを使う
ファイル転送にユーザー名とパスワードを使う代わりにキーファイルを使うこともできます。そのためには、ロボットに付属しているKEBA提供のPPKファイルをPEMファイルに変換する必要があります。これはputtygenというputtyと一緒にインストールされるユーティリティでできます。
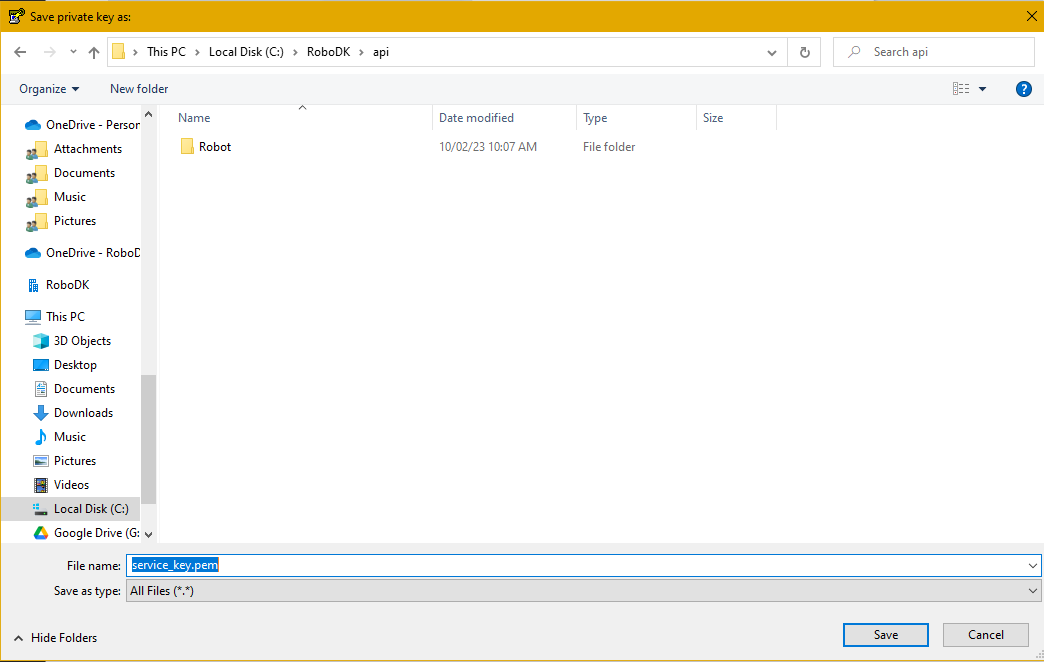
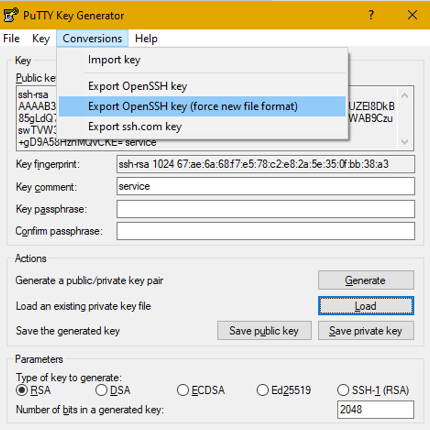
puttygenで、Loadを選択して鍵ファイルをロードします。次に Conversions ドロップダウンをクリックし、Export open SSH Key (force new file format) を選択します。
service_key.pemという名前をつけて、RoboDK APIフォルダ(デフォルトではC:¥RoboDK¥api)に保存します。