Navigation offcanvas
次の手順は、ロボットからロボットの関節を取得できます:
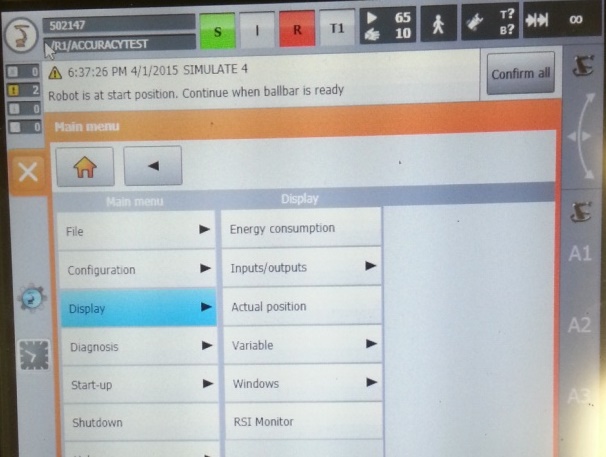
1.メニュー➔表示➔実際の位置(Actual position)を選択
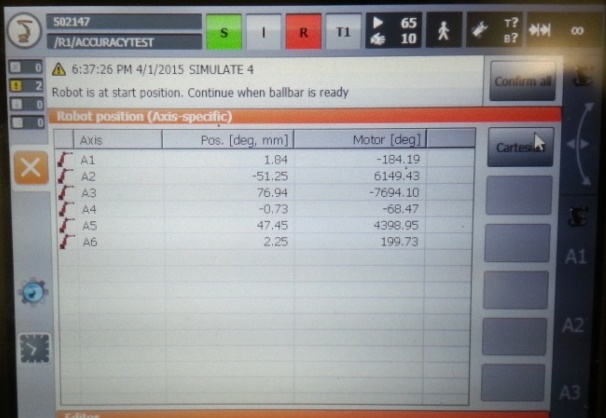
2.関節モードを選択し、左側の列を使用してロボットの関節を取得します