RoboDK
ロボットドライバーは、オフラインプログラミング(プログラムを生成し、ロボットに転送して実行する方法)に代わる方法を提供します。RoboDKから直接ロボット上でシミュレーションを実行することができます(オンラインプログラミング)。詳細はロボットドライバーのセクションをご覧ください。
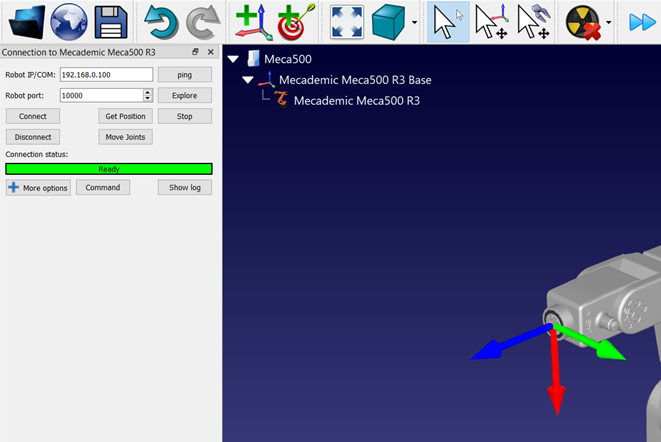
以下の手順に従ってRoboDKからロボットに接続してください:
1.RoboDKでロボットを右クリックします。
2.選択してください:
3.ロボットのIPを入力してください
4.接続を選択します。
接続に成功すると、「Ready」という緑色のメッセージが表示されます。
注:接続に失敗した場合、コンピュータとロボット間のネットワーク接続が正しく確立されていることを確認してください。コンピュータのIPがロボットと同じネットワーク内にあることを確認してください。Windowsでは管理者権限が必要です。詳しくはドライバのトラブルシュートのセクションを参照してください。
注:この問題のトラブルシューティングを改善するには、Windowsファイアウォールをオフにすることをお勧めします。
ロボットを動かすには、接続メニューからロボットジョイントの取得、ジョイントの移動を選択します。
PCからロボットにプログラムを実行するには、2種類の方法があります:
1.RoboDK(オンラインプログラミング)で、ロボットをステップバイステップで動作させ、フィードバックを行います:
この方法では、ロボットをサーバーとして使用し、各命令はシミュレータで実行されながらステップバイステップでロボットに送信されます。この方法はデバッグに便利です。
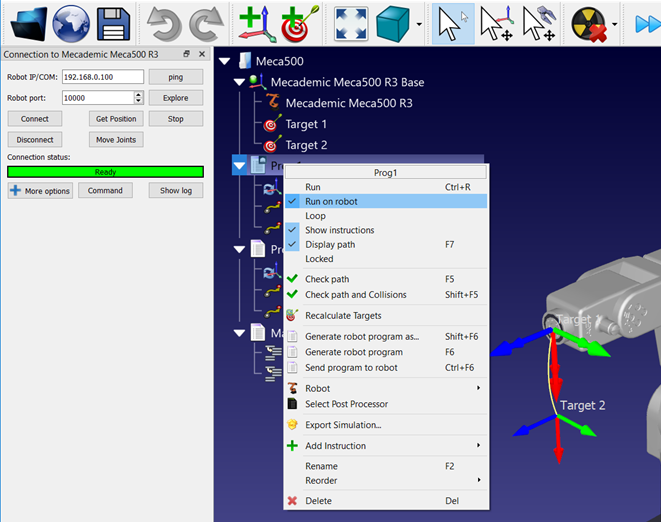
a.プログラム(この例ではPrint3D)を右クリックします。
b.ロボット上で実行を選択
c.プログラムをダブルクリックして起動します(または右クリックして「ファイル名を指定して実行」を選択します)。
このオプションにチェックを入れると、プログラムをダブルクリック(または右クリック→実行を選択)するたびに実際のロボットに接続します。
これらの操作はRoboDK APIからも利用でき、ロボットプログラミングを他のアプリケーションと統合することができます。APIはPythonやC#などのプログラミング言語で利用できます。
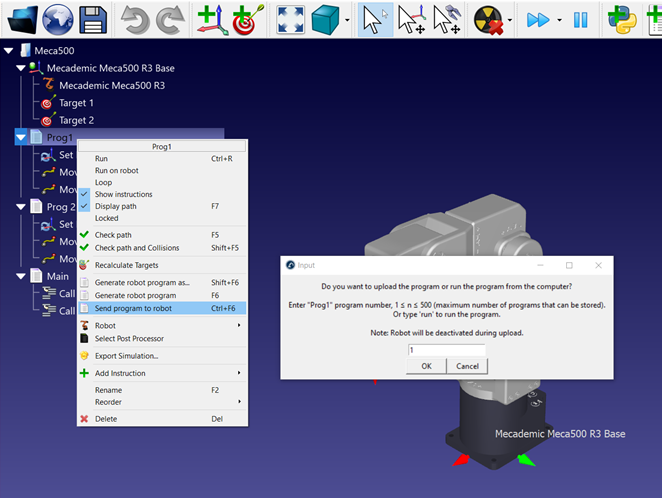
2.Mecademic ポストプロセッサを使用してロボットにプログラムを送信します。プログラム番号に "run "を指定することで、ロボット上でプログラムを実行することができます。完全なプログラムはオフラインプログラムとしてロボットコントローラに保存することもできます(ロボットオフラインプログラミング参照):
a.プログラム(この例ではProg1)を右クリックします。
b.Send program to robot (Ctrl+F6)を選択します。
ヒント: Mecademic(デフォルト)というポストプロセッサを使用して、プログラムをロボットに送信し、すぐに実行します。プログラムを右クリックし、Select Post Processorを選択してポストプロセッサを変更します。
ヒント: RoboDK のプログラム名にプログラム番号を指定すると、他のオフラインプログラムを呼び出すことができます。例えば、Main から Prog1 と Prog2 を呼び出すと、インデックス 1 と 2 のサブプログラムを呼び出します。