メカデミックコントローラでプログラムを実行
RoboDK シミュレーションの準備ができたら、Mecademic ロボットコントローラで実行できるプログラムをオフラインで生成することができます (スクリプトファイル)。また、リモートコンピュータからロボットコントローラ上でプログラムを実行する PY ファイルを生成することもできます。
以下の手順に従って、ロボットシミュレーションからオフラインプログラム(スクリプトまたはPYファイル)を生成してください:
1.プログラム(この例ではProg1)を右クリックします。
2.ロボットプログラムの生成 F6
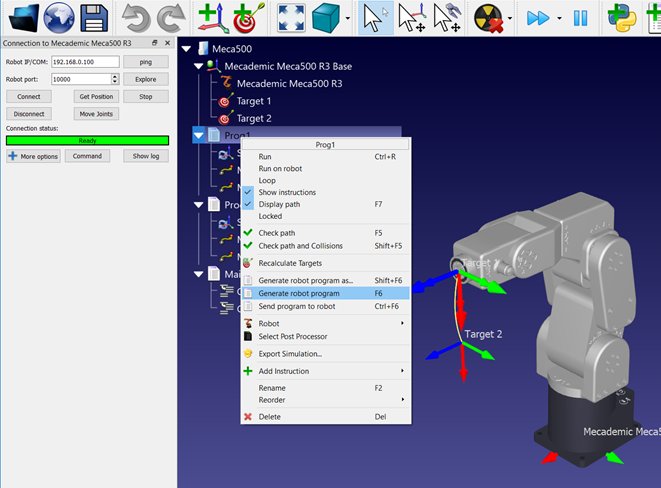
プログラムはテキストエディタで表示されます(この動作はメニューで変更できます:ツール➔ オプション➔ プログラム)。
ヒント: Mecademicというポストプロセッサーを使用して、Mecademicウェブインターフェイス上で編集して実行できるスクリプトファイルを生成します。ポストプロセッサーを変更するには、プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
ヒント: IDEで編集して実行できるPYファイルを生成するには、Mecademic Pythonというポストプロセッサーを使用します。ポストプロセッサーを変更するには、プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
スクリプトファイルの読み込み方法
プログラム/スクリプトファイルを入手したら、Web インターフェイスを使用してプログラムを実行したり、コントローラにロードしたりできます。以下の手順に従って、Mecademic Web インターフェイスを使用してプログラムを実行してください:
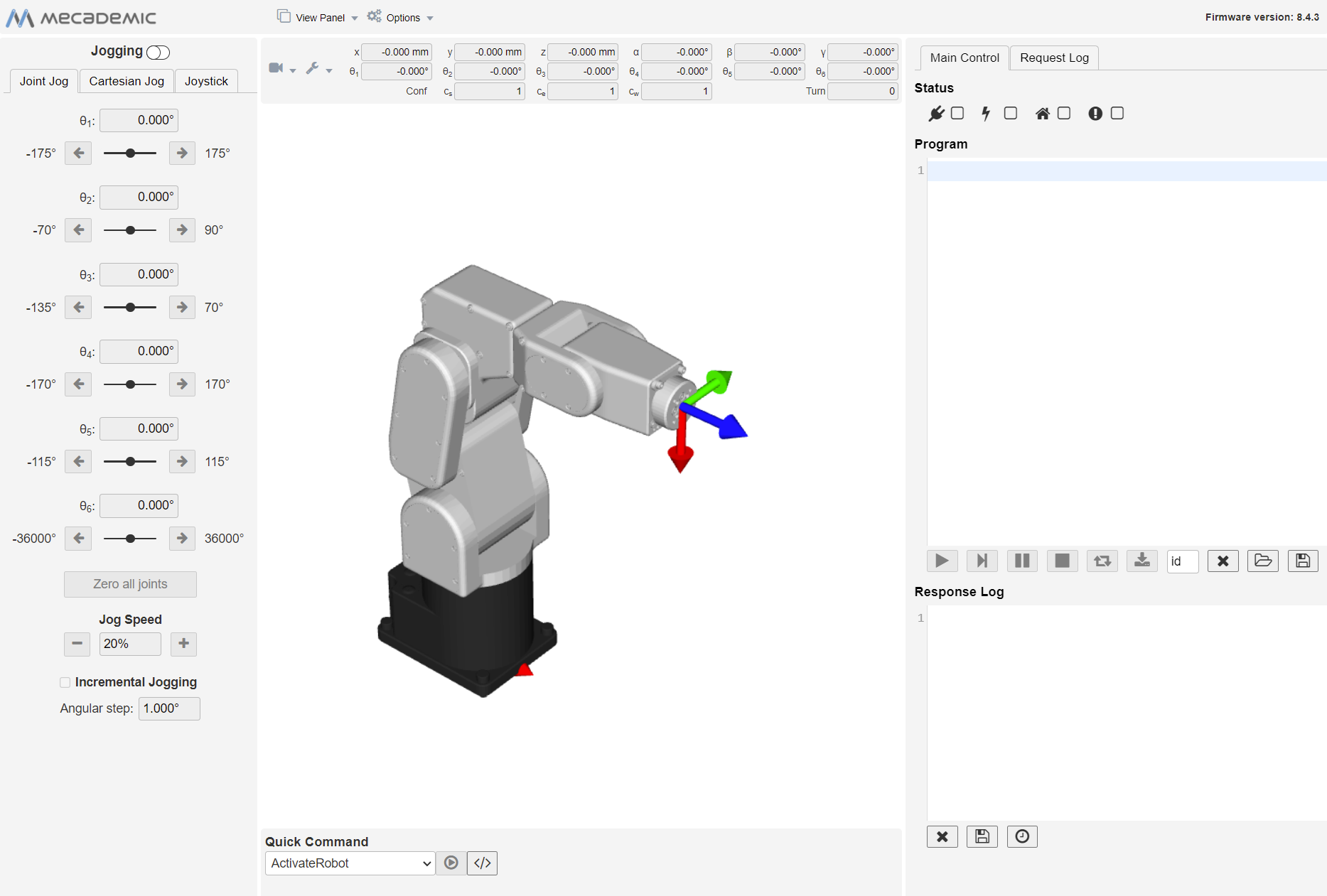
1.ウェブブラウザでMecademicウェブインターフェースを開いてください(ロボットのIPアドレスを入力してください)。
2.スクリプトの内容をコピーし、プログラムエディタに貼り付けます。
3.ステータスバーの「接続」、「アクティベート」、「ホーム」を選択してください。
4.再生ボタンをクリックするとプログラムが実行されます。
5.保存ボタンをクリックして、プログラムをロボットにアップロードします。
PYファイルの実行方法
Mecademic TCP/IPインターフェースを使用してMecademicロボットに自動的に接続し、リモートでプログラムを実行するPythonファイルを生成することができます。
Mecademic Python というポストプロセッサーを選択してください。以下の手順は、Mecademic上でPYファイルを実行する手順をまとめたものです。
1.プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
2.Pythonを選択
3.プログラムを右クリックし、ロボットプログラムの生成(F6)を選択します。
4.生成されたPYファイルをディスクに保存します。
5.PYファイルをIDEで開いて実行するか、Python環境から直接実行してください。