メカデミック
Mecademicロボットのプログラミングには、Mecademicコントローラ上で実行されるMecademicスクリプトファイルを使用する方法、外部で実行されるPYファイルを使用する方法、RoboDKドライバを使用する方法の3種類があります。
1.スクリプトファイル: RoboDK を使って Mecademic コントローラに読み込ませるスクリプトを生成することができます。これは Mecademic ロボットに使用されているデフォルトのポストプロセッサを使用して実現されます。Mecademic のウェブインタフェースを使ってスクリプトプログラムを直接コピーすることができます。
2.PYファイル:Mecademic TCPインターフェースを使用してMecademicロボットに自動的に接続し、リモートでプログラムを実行するPythonファイルを生成できます。Mecademic Pythonというポストプロセッサを選択してください。
3.オンラインプログラミングRoboDKでは、作成したプログラムをオフラインプログラム(最大500個)としてロボットのメモリにアップロードすることができます。このオフラインプログラムは他の方法から呼び出すことができます。
RoboDK を使えば、Mecademic ロボットで実行可能なオフラインプログラム、スクリプトファイル、PY ファイルを生成することができます。さらに、ロボットがコンピュータに接続されていれば、RoboDK からロボットにプログラムを実行させることもできます。
メカデミックロボットIPの取得
RoboDK からプログラムを実行したり転送したりするには、Mecademic ロボットの IP が必要です。Mecademic ロボットはデフォルトで 192.168.0.100 という IP を使用しています。お使いのロボットの IP が正しいかどうかは、ブラウザで IP を入力してウェブインターフェースにアクセスすることで確認できます
以下の画像のように、ロボットのウェブインターフェイスが表示されない場合は、ネットワーク接続を適切に設定してください。
注:ロボットはイーサネット接続(直接接続またはネットワーク経由コンピュータに接続されている必要があります。Pingテストにより、ネットワークリンクが正しく確立されているかどうかをテストすることができます。
メカデミックコントローラでプログラムを実行
RoboDK シミュレーションの準備ができたら、Mecademic ロボットコントローラで実行できるプログラムをオフラインで生成することができます (スクリプトファイル)。また、リモートコンピュータからロボットコントローラ上でプログラムを実行する PY ファイルを生成することもできます。
以下の手順に従って、ロボットシミュレーションからオフラインプログラム(スクリプトまたはPYファイル)を生成してください:
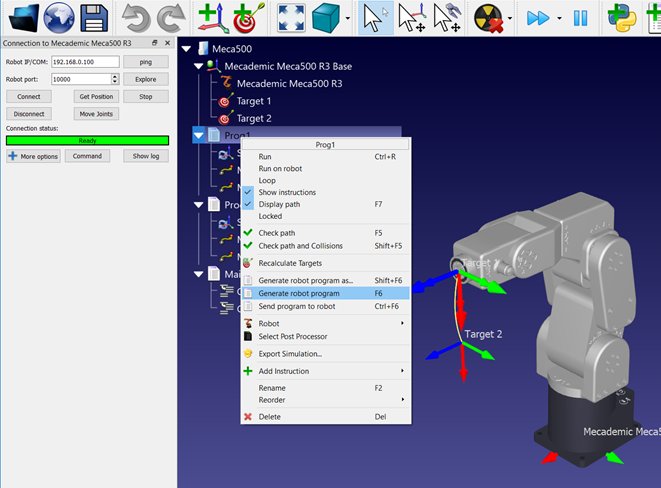
1.プログラム(この例ではProg1)を右クリックします。
2.ロボットプログラムの生成 F6
プログラムはテキストエディタで表示されます(この動作はメニューで変更できます:ツール➔ オプション➔ プログラム)。
ヒント: Mecademicというポストプロセッサーを使用して、Mecademicウェブインターフェイス上で編集して実行できるスクリプトファイルを生成します。ポストプロセッサーを変更するには、プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
ヒント: IDEで編集して実行できるPYファイルを生成するには、Mecademic Pythonというポストプロセッサーを使用します。ポストプロセッサーを変更するには、プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
スクリプトファイルの読み込み方法
プログラム/スクリプトファイルを入手したら、Web インターフェイスを使用してプログラムを実行したり、コントローラにロードしたりできます。以下の手順に従って、Mecademic Web インターフェイスを使用してプログラムを実行してください:
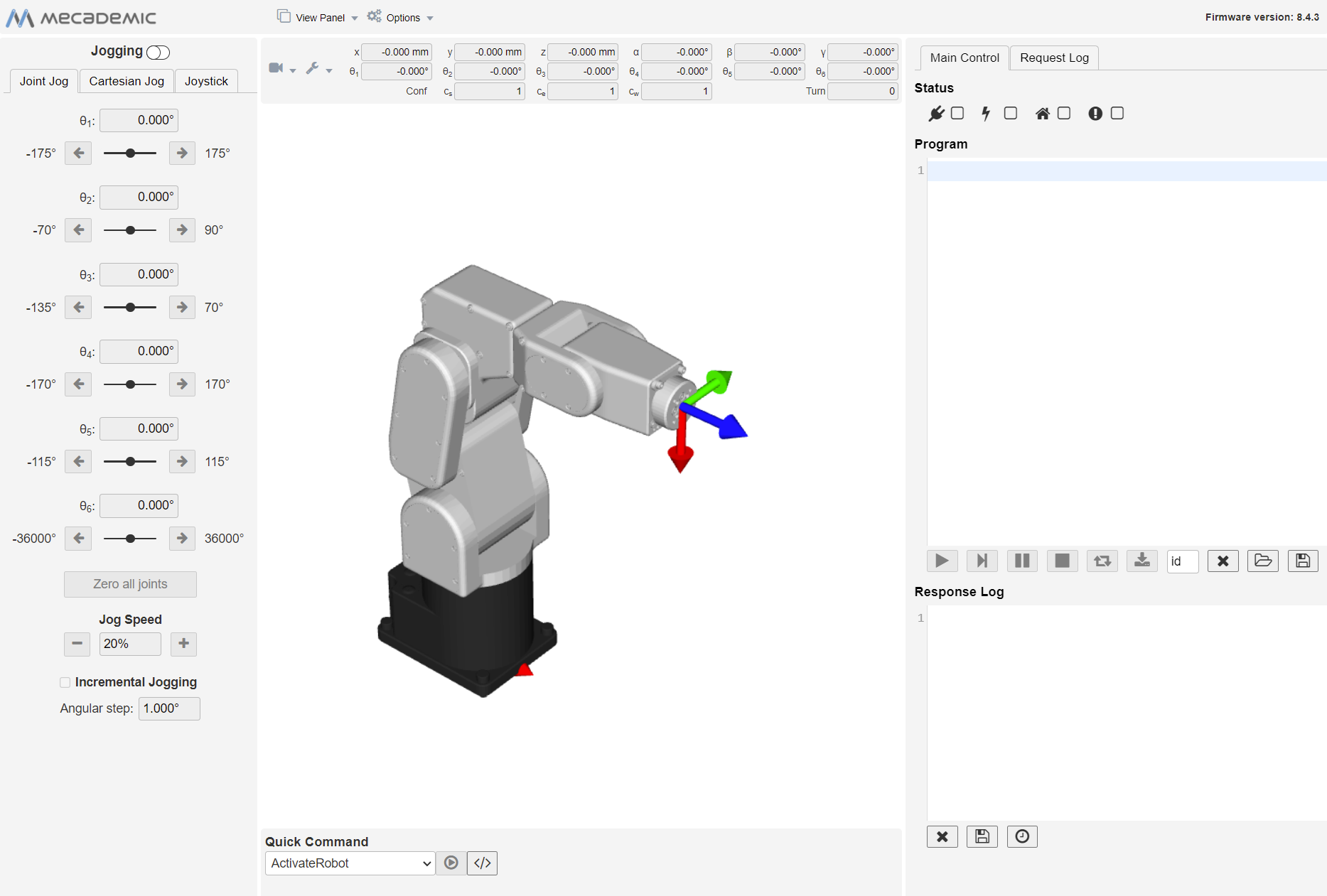
1.ウェブブラウザでMecademicウェブインターフェースを開いてください(ロボットのIPアドレスを入力してください)。
2.スクリプトの内容をコピーし、プログラムエディタに貼り付けます。
3.ステータスバーの「接続」、「アクティベート」、「ホーム」を選択してください。
4.再生ボタンをクリックするとプログラムが実行されます。
5.保存ボタンをクリックして、プログラムをロボットにアップロードします。
PYファイルの実行方法
Mecademic TCP/IPインターフェースを使用してMecademicロボットに自動的に接続し、リモートでプログラムを実行するPythonファイルを生成することができます。
Mecademic Python というポストプロセッサーを選択してください。以下の手順は、Mecademic上でPYファイルを実行する手順をまとめたものです。
1.プログラムを右クリックし、「ポストプロセッサーを選択」を選択します。
2.Pythonを選択
3.プログラムを右クリックし、ロボットプログラムの生成(F6)を選択します。
4.生成されたPYファイルをディスクに保存します。
5.PYファイルをIDEで開いて実行するか、Python環境から直接実行してください。
RoboDK からプログラムを実行
ロボットドライバーは、オフラインプログラミング(プログラムを生成し、ロボットに転送して実行する方法)に代わる方法を提供します。RoboDKから直接ロボット上でシミュレーションを実行することができます(オンラインプログラミング)。詳細はロボットドライバーのセクションをご覧ください。
以下の手順に従ってRoboDKからロボットに接続してください:
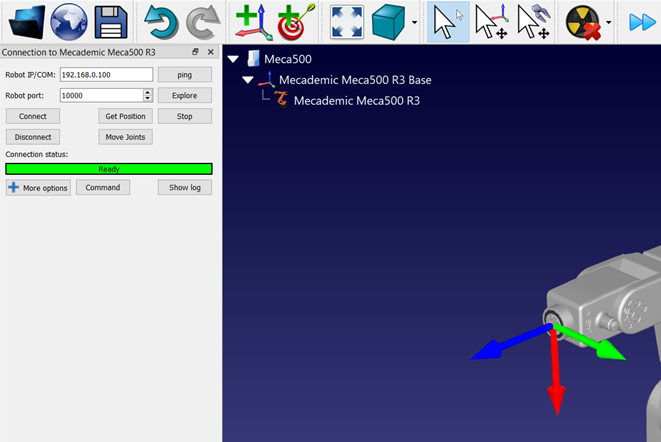
1.RoboDKでロボットを右クリックします。
2.選択してください:
3.ロボットのIPを入力してください
4.接続を選択します。
接続に成功すると、「Ready」という緑色のメッセージが表示されます。
注:接続に失敗した場合、コンピュータとロボット間のネットワーク接続が正しく確立されていることを確認してください。コンピュータのIPがロボットと同じネットワーク内にあることを確認してください。Windowsでは管理者権限が必要です。詳しくはドライバのトラブルシュートのセクションを参照してください。
注:この問題のトラブルシューティングを改善するには、Windowsファイアウォールをオフにすることをお勧めします。
ロボットを動かすには、接続メニューからロボットジョイントの取得、ジョイントの移動を選択します。
PCからロボットにプログラムを実行するには、2種類の方法があります:
1.RoboDK(オンラインプログラミング)で、ロボットをステップバイステップで動作させ、フィードバックを行います:
この方法では、ロボットをサーバーとして使用し、各命令はシミュレータで実行されながらステップバイステップでロボットに送信されます。この方法はデバッグに便利です。
a.プログラム(この例ではPrint3D)を右クリックします。
b.ロボット上で実行を選択
c.プログラムをダブルクリックして起動します(または右クリックして「ファイル名を指定して実行」を選択します)。
このオプションにチェックを入れると、プログラムをダブルクリック(または右クリック→実行を選択)するたびに実際のロボットに接続します。
これらの操作はRoboDK APIからも利用でき、ロボットプログラミングを他のアプリケーションと統合することができます。APIはPythonやC#などのプログラミング言語で利用できます。
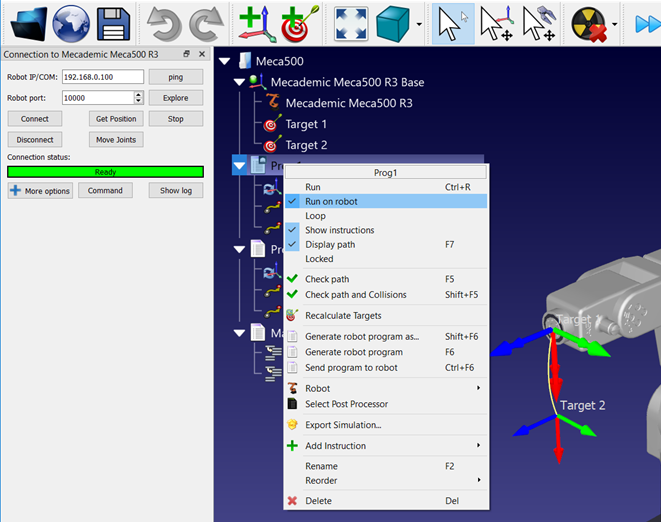
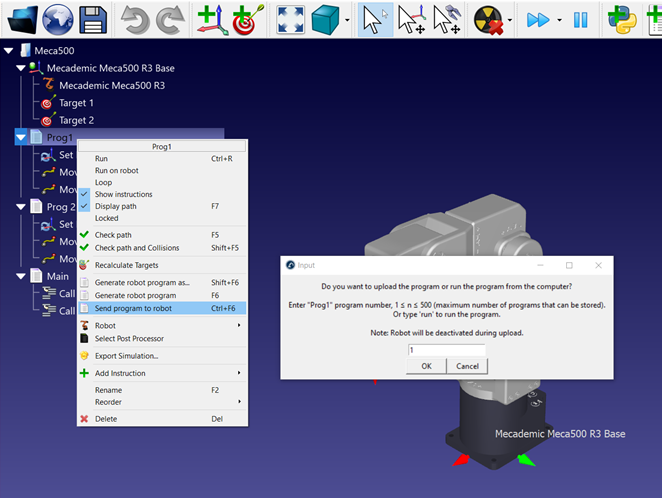
2.Mecademic ポストプロセッサを使用してロボットにプログラムを送信します。プログラム番号に "run "を指定することで、ロボット上でプログラムを実行することができます。完全なプログラムはオフラインプログラムとしてロボットコントローラに保存することもできます(ロボットオフラインプログラミング参照):
a.プログラム(この例ではProg1)を右クリックします。
b.Send program to robot (Ctrl+F6)を選択します。
ヒント: Mecademic(デフォルト)というポストプロセッサを使用して、プログラムをロボットに送信し、すぐに実行します。プログラムを右クリックし、Select Post Processorを選択してポストプロセッサを変更します。
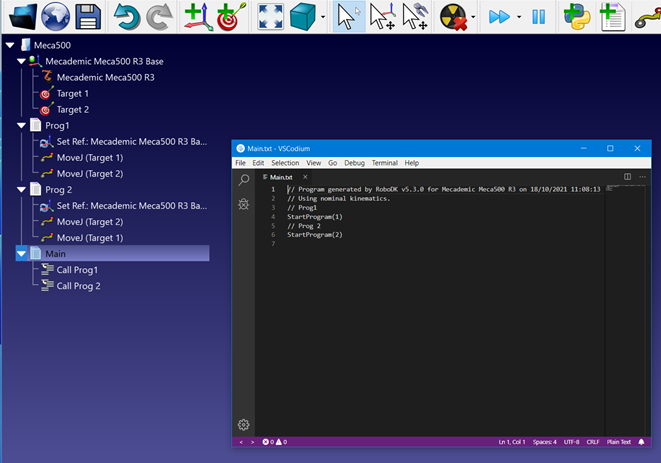
ヒント: RoboDK のプログラム名にプログラム番号を指定すると、他のオフラインプログラムを呼び出すことができます。例えば、Main から Prog1 と Prog2 を呼び出すと、インデックス 1 と 2 のサブプログラムを呼び出します。
その他のヒント
このセクションでは、Mecademic Meca500ロボットをプログラミングする際に役立つその他の情報を提供します。
オフライン番組
オフラインプログラムはロボット上で持続し、それぞれのプログラム番号を使って呼び出すことができます。プログラム番号の選択は、プログラム名に追加することで自動化できます。
RoboDKは自動的にIDを取得し、そのIDを使ってプログラムを呼び出します。これはサブルーチンにも適用されます。
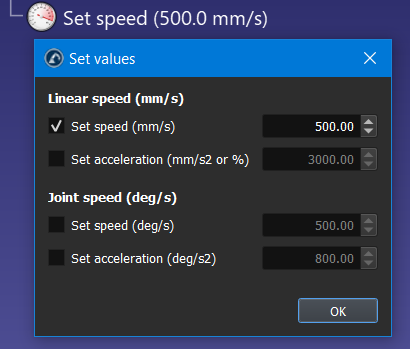
スピードユニット
メカデミックロボットの関節速度、直線加速度、関節加速度の単位は、設定速度指示メニューに表示される他の単位とは逆に、パーセント値(%)で指定してください。
直線速度は正しく、mm/s単位で指定する必要があります。