パルス毎度の情報の更新
安川電機のロボットは、角関節の値をパルスに、またはその逆に変換する為に、各関節の1度あたりのパルスの比率を知る必要があります。RoboDKは、パルス毎度の比率がロボットパラメータで指定されている場合、正しいパルス情報を使用してプログラムを自動的に生成します。
次の手順を辿って、この情報がロボットに指定されているかどうかを確認します(または更新します)。
1.RoboDKで安川Motomanロボットをダブルクリックします
2.パラメーターを選択
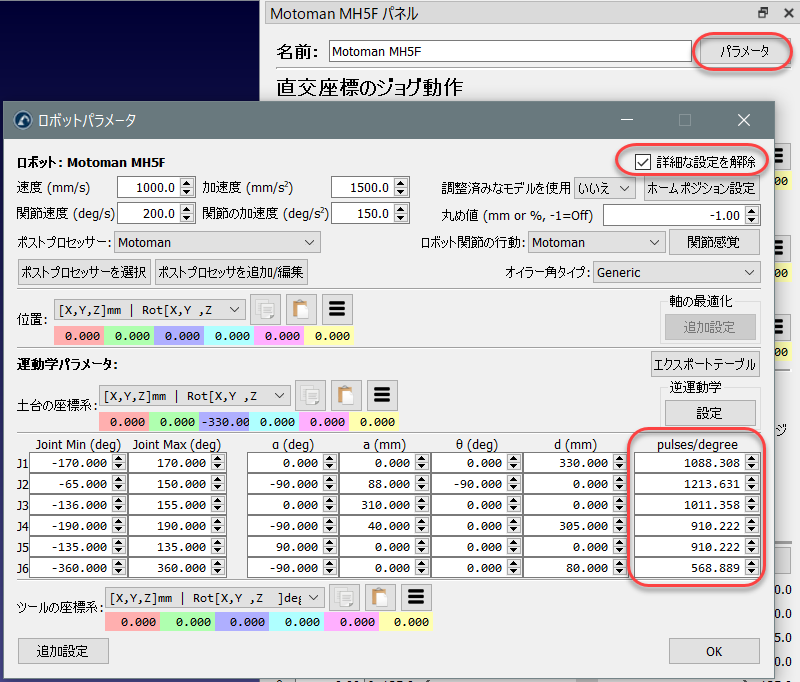
3.詳細設定を解除を選択します
4.各関節のパルス/度の値を確認または更新します
この情報を更新すると、正しいパルス/度の情報でプログラムを生成します。