安川Motomanロボット
RoboDKは、XRCコントローラ以降すべての安川電機(Motoman)のロボットコントローラをサポートしています。RoboDKで直接JBIプログラムファイルを作成したり、安川電機のロボットドライバーを使用して、RoboDKから実際のロボットが操作できます。
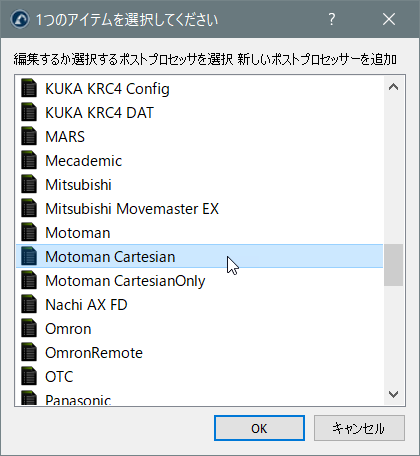
RoboDKからデフォルトでJBIプログラムを生成すると、ターゲット出力がパルスで表示される場合があります。プログラムからツールの変更(SETTOOL)や直交座標ターゲットの編集(相対ジョブ)などの一部の操作は、特定のソフトウェアオプションが必要です。デカルト座標を使用してプログラムを生成する場合は、デフォルトのドライバーをMotoman Cartesianに変更してください。
ポストプロセッサーとそれらをカスタマイズする方法の詳細については、ポストプロセッサー項目へ。
安川Motoman用のRoboDKドライバー
ロボットドライバーは、オフラインプログラミングに代替手段を可能にします。安川/Motomanドライバーを使用すると、プログラムをシミュレーションしながら、ロボットをRoboDKから直接動かせます(オンラインプログラミング)。詳細については、ロボットドライバー項目へ。
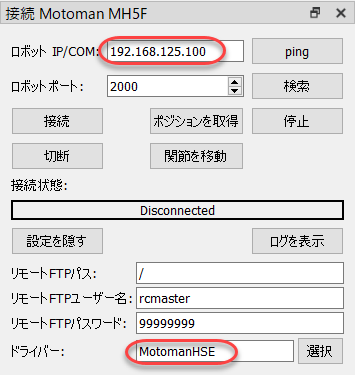
RoboDKバージョン4.2以降、高速イーサネットサーバー(HSE)プロトコルを使用するRoboDKのロボットドライバーとMotomanHSEと呼ばれるドライバーを使用して、ロボットコントローラーと接続できます。このドライバーは、MotoComソフトウェアオプションを使用する必要はありません。この通信プロトコル(「リモート」とも呼ばれます)は、最近の安川ロボットコントローラでデフォルトで使用できます。このプロトコルを使用すると、70 Hzのリフレッシュレートでコンピューターからロボットの移動および監視ができます。
接続-ロボットに接続を選択し、ロボットIPを入力してから、接続を選択します(ポートは無視できます)。HSEプロトコル(MotomanHSE)をサポートする最新のドライバーパスを使用していることを確認してください。
ロボットでこの操作モードを有効にするには、ティーチペンダントをリモートモードに設定するだけです。

これにより、オンラインプログラミングとデバッグ用にRoboDKのロボットで実行の設定が使用できます。接続は、通常のイーサネット接続(TCP / IP-UDP)を介して成立できます。
設定は自動的に行われ、ロボットコントローラー側で特定の設定を行う必要はありません。
以下のコントローラーは、高速イーサネットサーバードライバーで動作します:
●DX100
●DX200
●FS100
●NX100
●YR1000
RoboDKと安川のMotoComソフトウェアオプションおよびapimotomanドライバーを使用して、接続されたPCからロボットを自動的に動かすように、RoboDKとどの安川ロボットでも間に接続が成立できます。
パルス毎度の情報の更新
安川電機のロボットは、角関節の値をパルスに、またはその逆に変換する為に、各関節の1度あたりのパルスの比率を知る必要があります。RoboDKは、パルス毎度の比率がロボットパラメータで指定されている場合、正しいパルス情報を使用してプログラムを自動的に生成します。
次の手順を辿って、この情報がロボットに指定されているかどうかを確認します(または更新します)。
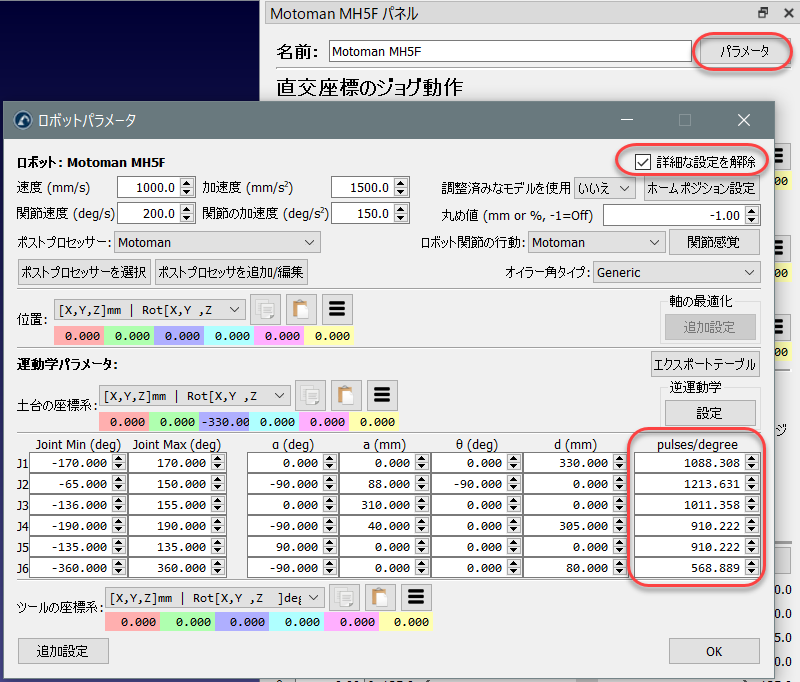
1.RoboDKで安川Motomanロボットをダブルクリックします
2.パラメーターを選択
3.詳細設定を解除を選択します
4.各関節のパルス/度の値を確認または更新します
この情報を更新すると、正しいパルス/度の情報でプログラムを生成します。