リッスンノードの設定
Omron-TM 用 RoboDK ドライバを使えば、RoboDK から直接オムロンTM ロボット上でプログラムを実行することができます。また、プログラムをスクリプトファイルとして生成し、TCP/IP プロトコルでストリームすることもできます。どちらの場合も、ロボットがリッスンノードになっていることを確認してください。このセクションでは、RoboDK と Omron-TM ロボットの通信設定方法について説明します。
異なるポストプロセッサーを選択したり、ポストプロセッサーをカスタマイズして、オフラインでプログラムを生成し実行する方法を定義することも可能です(例えば、グリッパーや外部センサーをサポートするため)。
注:Omron-TMロボット(OmronまたはTechmanと呼ばれる)のデフォルトのポストプロセッサは、前のセクションで説明したように手動でロードできるZIPファイルを生成します。あるいは、リモートポストプロセッサは、リモートで使用できるSCRIPTプログラムとPYファイルを生成します。PYファイルを実行すると、自動的にロボットに接続し、TCP/IP経由でSCRIPTファイルを送信します。
注:リモートポストプロセッサを使ってプログラムを生成すると、SCRIPTファイルとPYファイルの2つのファイルが得られます。PYファイルを実行すると、ロボットにプログラムが自動的に転送され、実行されます。
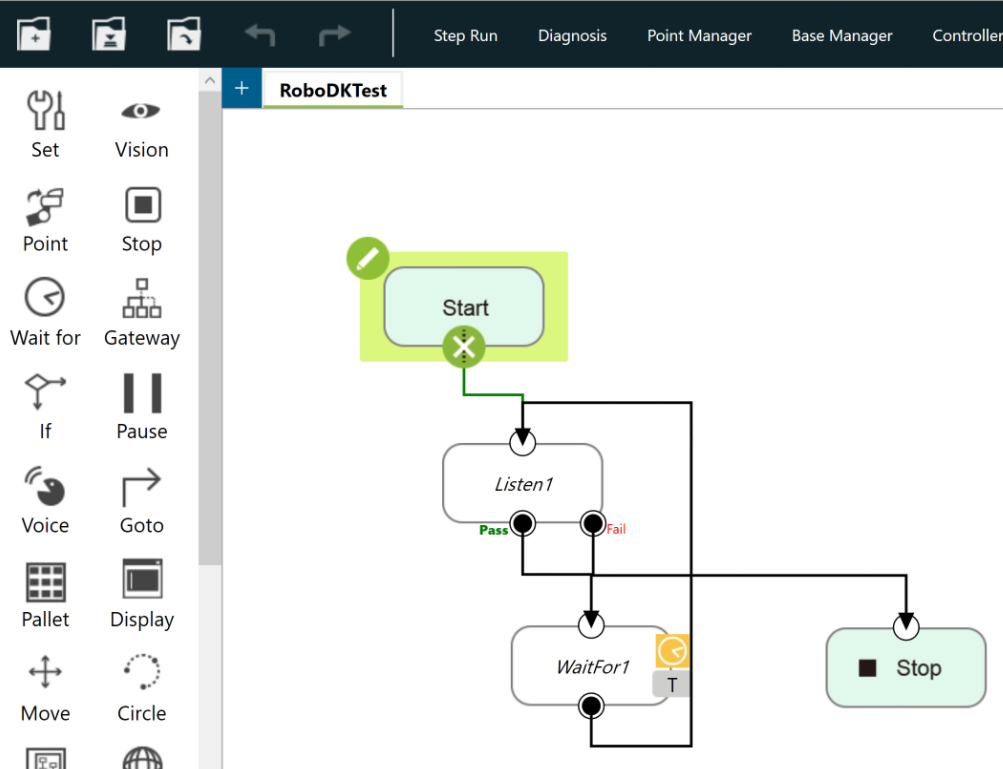
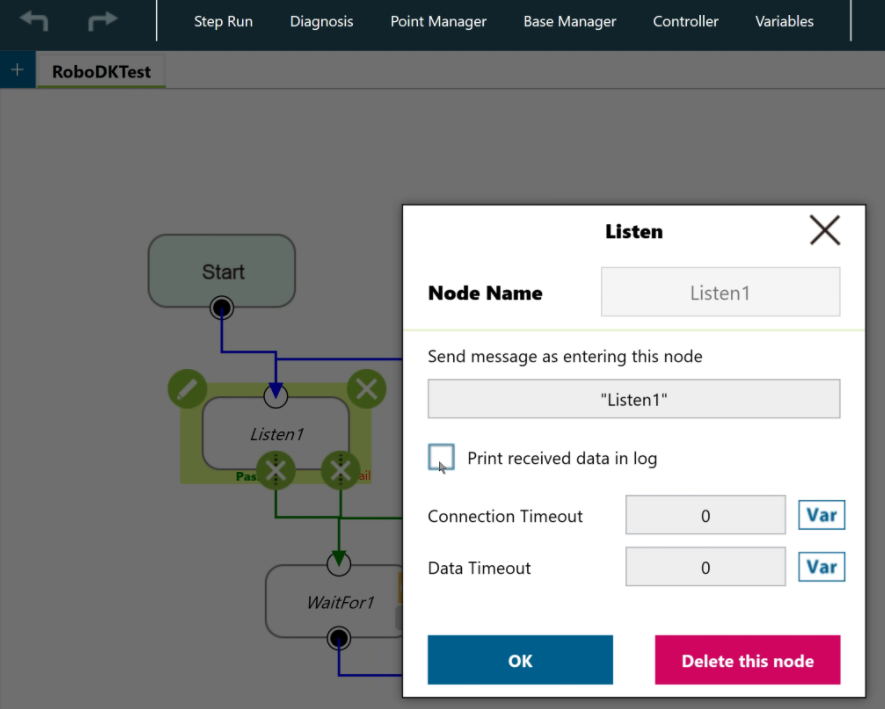
ロボットが遠隔操作するためには、ロボットをリッスンモードにする必要があります。これにはリッスンノードを使います。次の図は、RoboDK から送られたプログラムを自動的に実行するプログラムのワークフローを示しています。トラブルシューティングのために、受信したデータをログに印刷することをお勧めします。
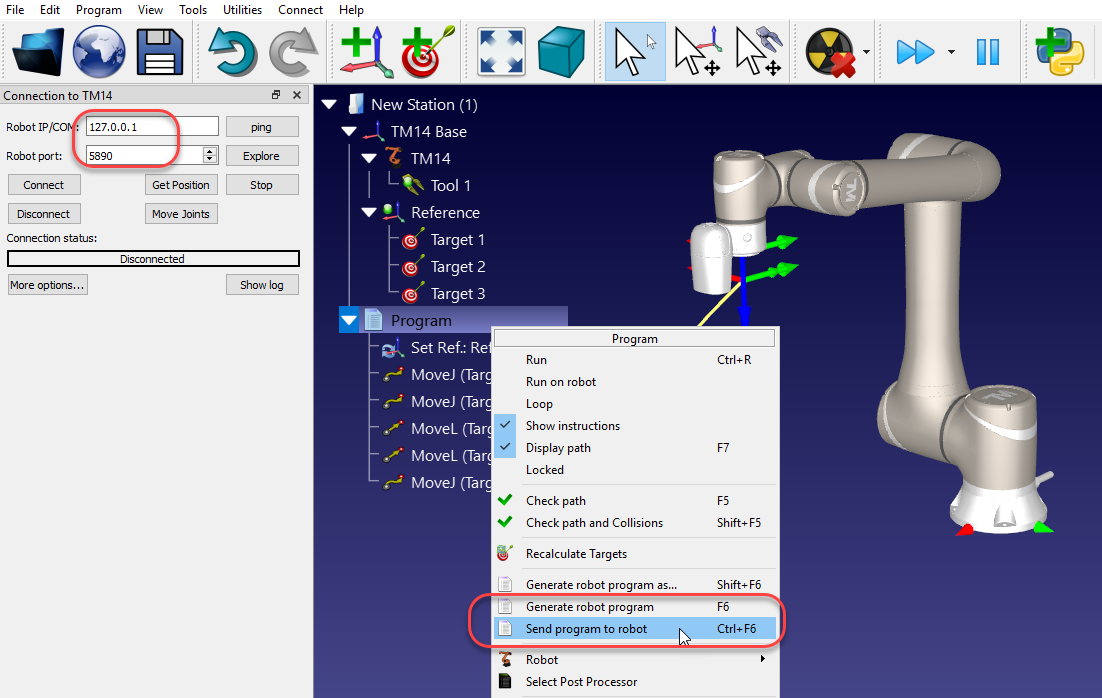
以下の手順でRoboDKの通信設定を行い、プログラムを実行してください:
1.コネクトを選択➔ コネクトロボット
2.ロボットIPの入力
3.5890ポートを入力してください。
4.プログラムを右クリック
5.ロボットプログラムの生成 F6 を選択します。
注:あるいは、Send program to robot (Ctrl+F6)を選択すると、自動的にロボット上でプログラムが実行されます。