USB
デフォルトのポストプロセッサを使用すると、ZIPファイルとしてプログラムを入手できます。このファイルをロボットに正しくロードするために、以下の特徴を持つUSBドライブを用意する必要があります:
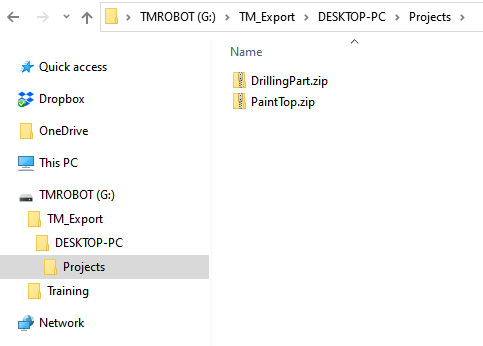
1.USBドライブの名前をTMROBOTにします(このステップは重要です)。
2.ドライブのルートにTM_Exportという新しいフォルダを作成します。
3.TM_Exportの中に、プロジェクトの新しいフォルダを作成します(名前は何でもかまいません)。
4.前のフォルダの中にProjectsという新しいフォルダを作成します。
5.Projectsフォルダ内にZIPプログラムを配置します。
重要:USB ドライブの名前と TM_Export 内のディレクトリツリーは重要です。TM_Exportフォルダ内のディレクトリツリーを変更しなければ、このUSBドライブを他の目的で使用することは可能です。
以下の手順に従って、TMFlowにプログラムをロードしてください:
1.RoboDKで作成したZIPファイルをUSBドライブに保存します。
2.メインメニュー➔ System➔ Import/Export を選択します。
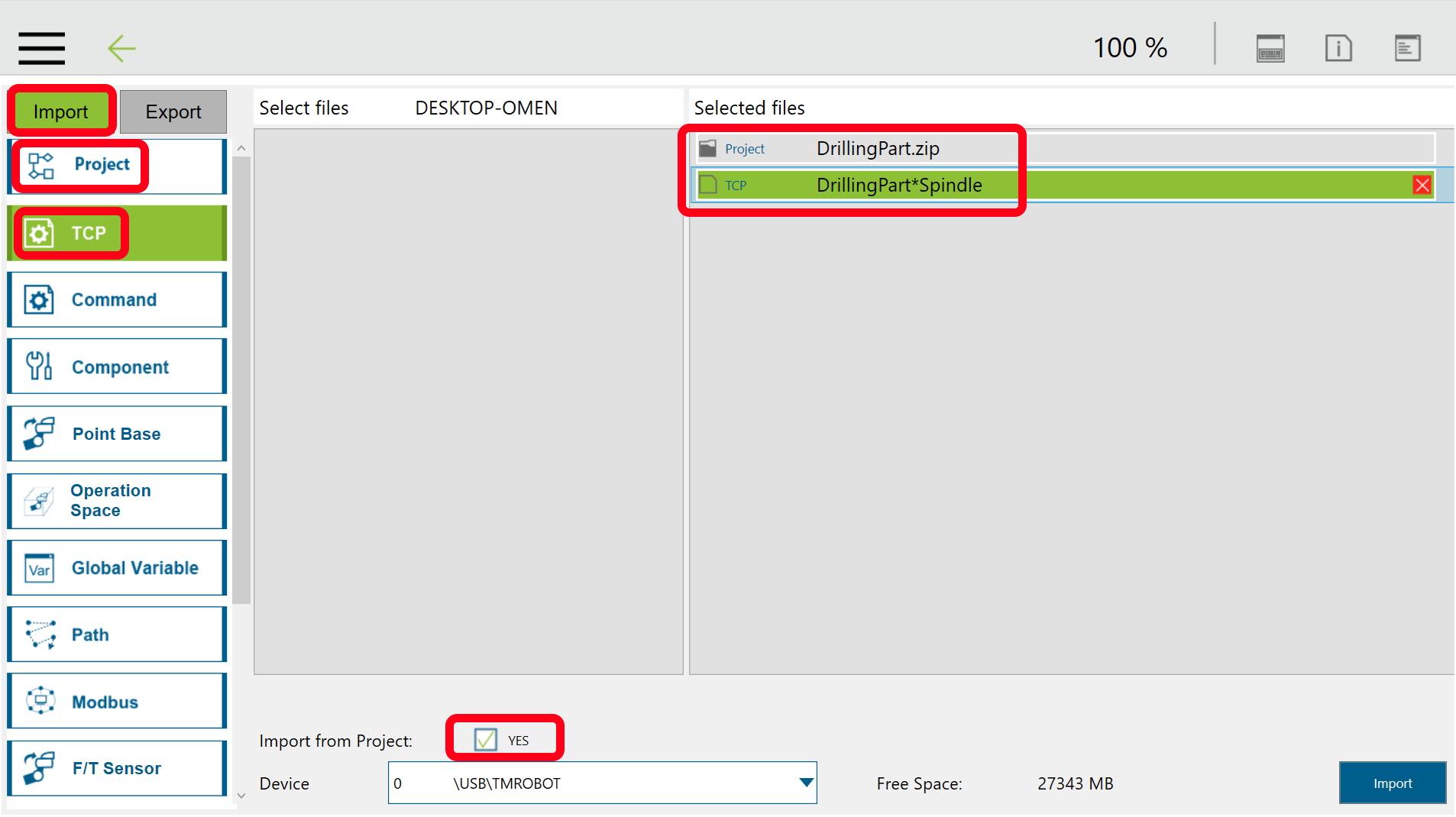
3.インポートを選択し、TM_Exportでフォルダを選択します。
4.プロジェクトを選択し、ZIPプログラムを選択します。
5.TCPを選択
6.プロジェクトからのインポート➔はい
7.プログラムを選択し、プログラム内のツールを選択して、確実にロードします。
8.インポートを選択
新しいプログラムを開く]を選択すると、プログラムが利用できるようになります。
注意:すでにロボットコントローラにツールが定義されている場合は、ステップ5,6,7を行う必要はありません。その代わり、RoboDKのツールにロボットコントローラと同じ名前を付けてください。