RoboDK
ロボットドライバーによって、オフラインプログラミング(プログラムを生成して、ロボットに転送してからて実行する事)の代わりを提供します。RoboDKのシミュレーションを直接ロボットで実行する事ができます(オンラインプログラミング)。詳細については、ロボットドライバー項目へ。
次の手順を辿って、RoboDKからロボットに接続します:
1.RoboDKでロボットを右クリックしてください
2.
3.ロボットのIPを入力して
4.接続を選択します。
接続が成功した場合、準備完了と示す緑色のメッセージが表示されます。
接続メニューからポジションを取得、関節を移動、直線移動を選択して、ロボットが動かせます。
PCからロボットにプログラムを実行させるには、2つ方法があります:
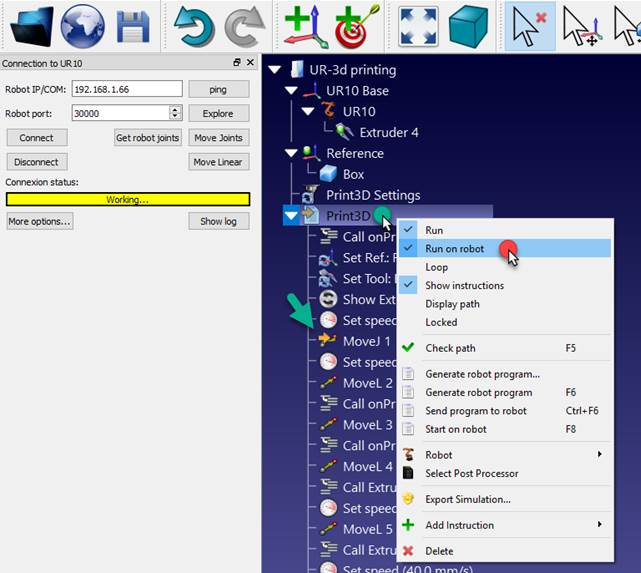
1.RoboDKでフィードバックを得ながら、指示を一歩一歩行いながらロボットで実行(オンラインプログラミング):
この方法は、ロボットをサーバーとして使用し、シミュレータで実行されると同時に各指示をロボットに送信します。この方法はデバッグをする際に役立ちます。
a.プログラムを右クリックします(この例ではPrint3D)
b.ロボットで実行を選択
c.プログラムをダブルクリックして開始します(または右クリックして実行を選択)。
この設定をチェックすると、プログラムをダブルクリックするたびに実際のロボットに接続します(または右クリックして実行を選択すると)。
これらの操作は、RoboDK APIからも使用できます。これにより、他のアプリケーションとロボットプログラミングを統合できます。APIは、Python、C#、およびその他のプログラミング言語で使用できます。
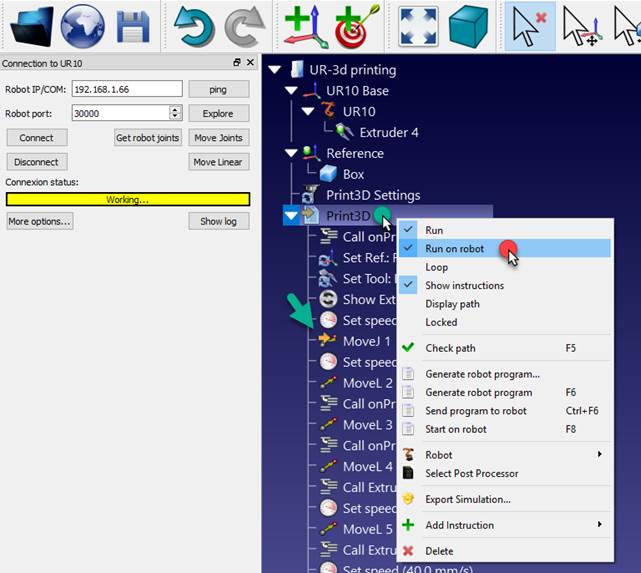
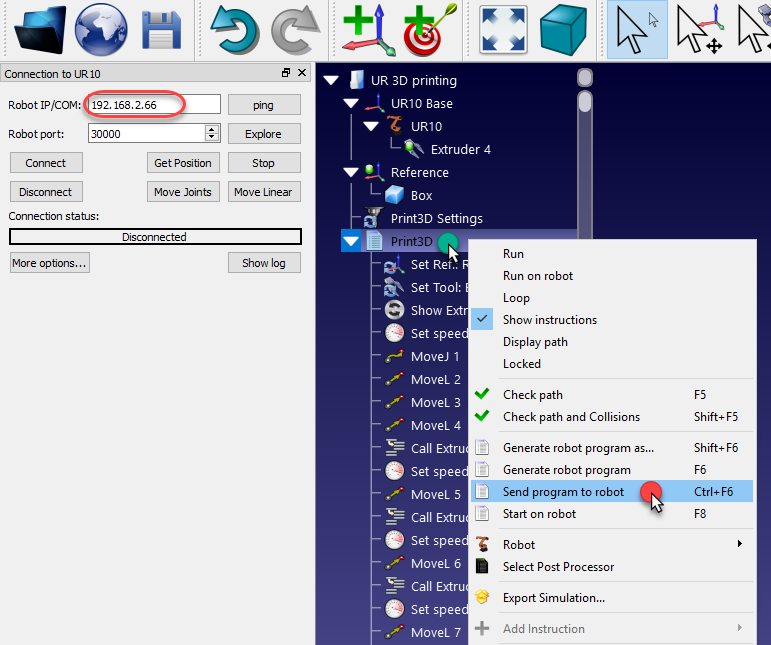
2.プログラムをロボットに送信は、完全なプログラムを生成してからロボットに転送します。転送が終えたら、実際のロボットでプログラムを開始しさせます(ロボットオフラインプログラミング)。
a.プログラムを右クリックしてください(この例ではPrint3D)。
b.プログラムをロボットに送信(Ctrl+F6)を選択します。
UReでリモートコントロールを有効にする方法#DriverURRemoteEnable
UReロボット(UR3e、UR5e、またはUR10e)を使用している場合は、URのロボットコントローラーでリモートコントロール設定を有効にする事をお勧めします。
UReのリモートコントロールを有効にするには、次の手順を辿ってください:
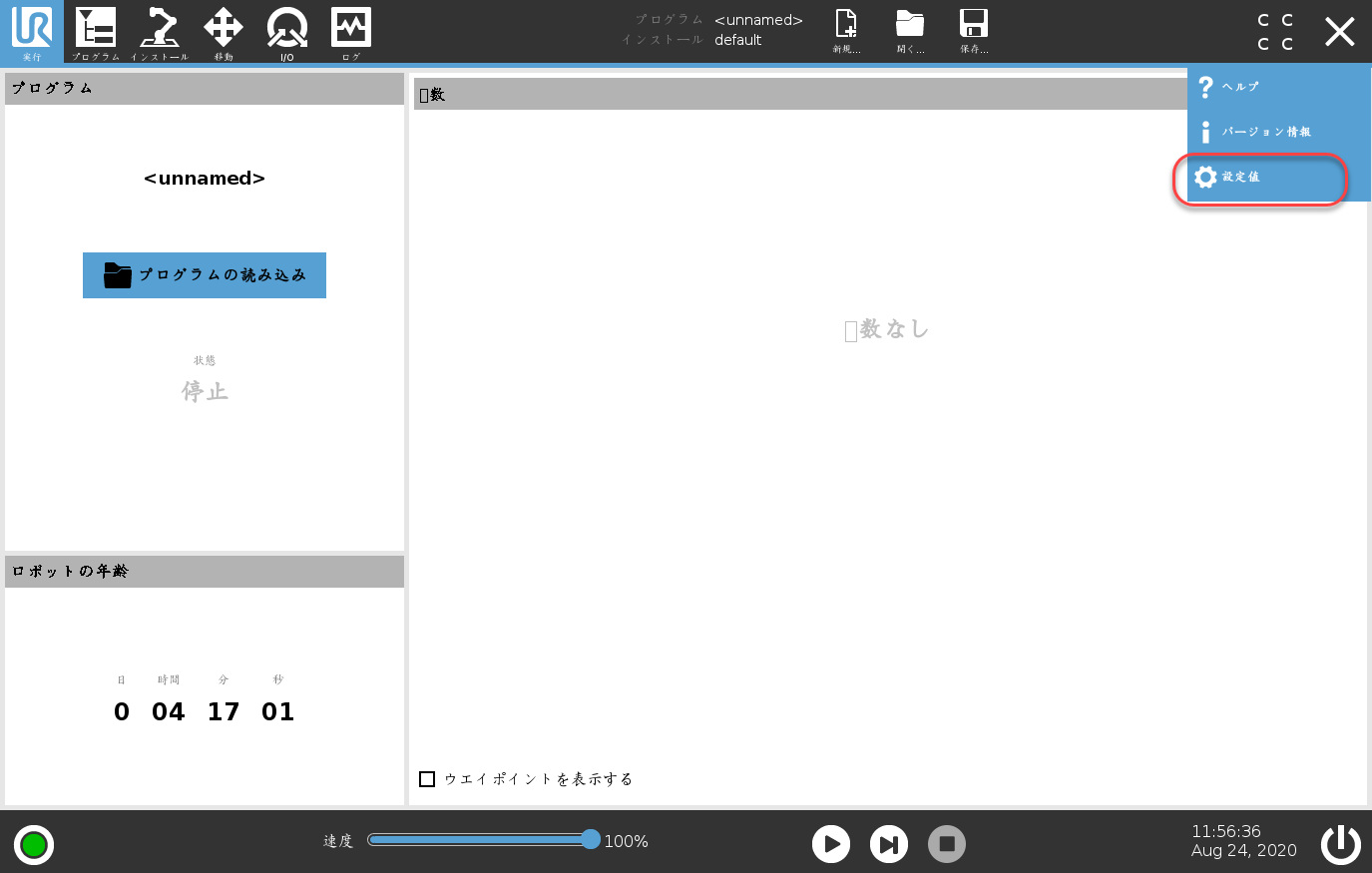
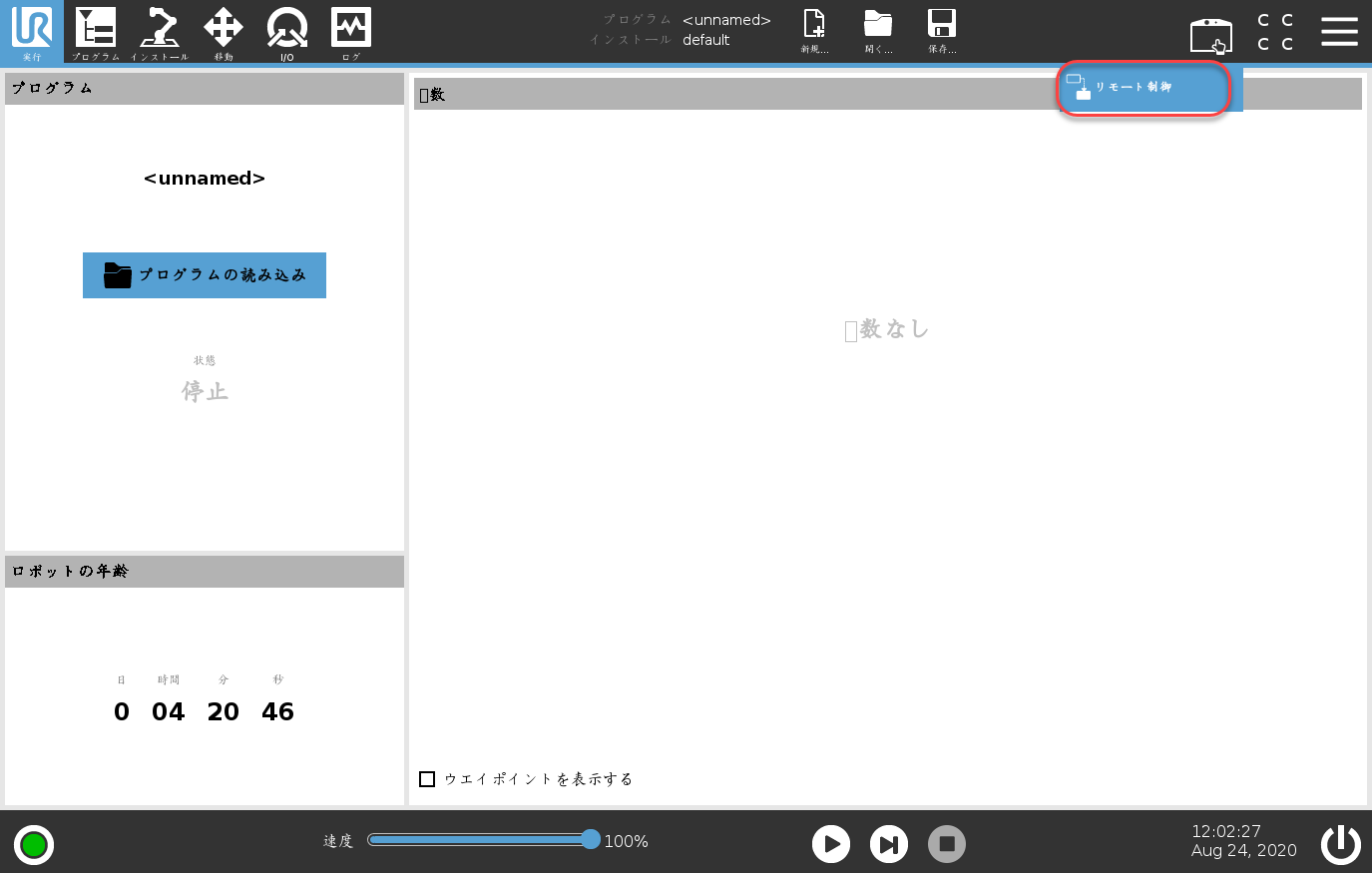
1.右上のボタンから設定メニューを選択してください
2.システム - リモートコントロール(System-Remote Control)を選択
3.有効を選択します
4.操作モードをリモートコントロールに変更します