UR
RoboDKシミュレーションの準備が出来たら、スクリプトおよび/またはURPプログラムが生成できます。この2つのファイルは、ロボットコントローラで実行できます。次の手順を辿って、ロボットシミュレーションからスクリプトおよびURPプログラムを生成します:
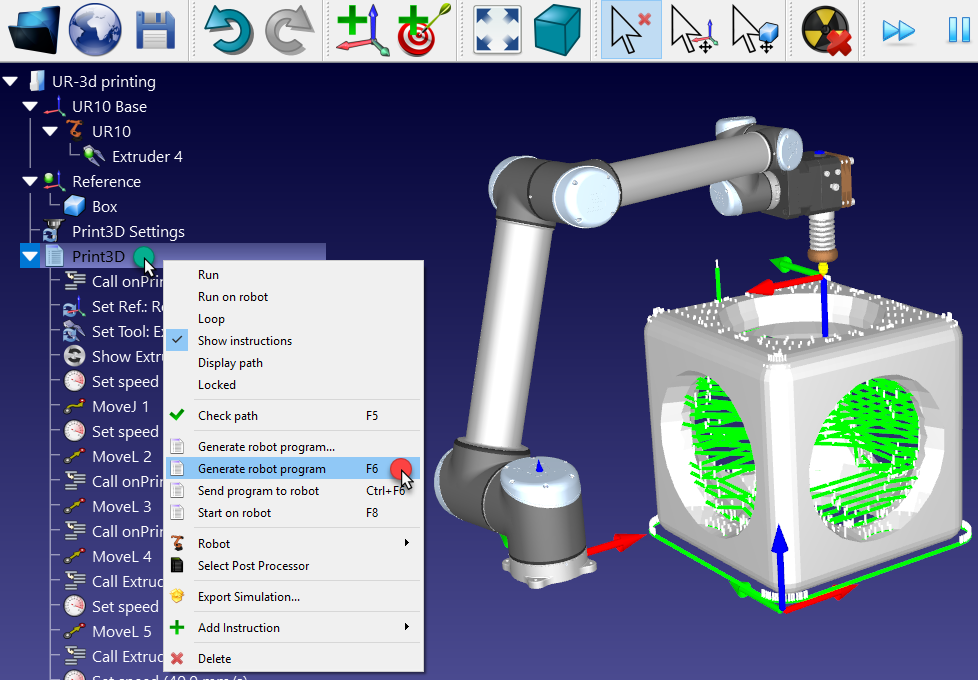
1.プログラムを右クリックします(この例ではPrint3D)。
2.ロボットプログラムを生成 F6を選択します
プログラムはテキストエディタに表示されます(この動作はメニューで変更できます:ツール➔設定➔プログラム)。
スクリプトおよびURPファイルの転送は、SFTP転送またはUSBドライブを介してできます。
URPプログラムを読み込む方法#UR-URP
次の手順は、ユニバーサルロボットのロボットにURPファイルを読み込む方法をまとめたものです。
1.プログラムを右クリックし、ポストプロセッサーを選択を選択します
2.Universal Robots URPを選択
デフォルトのポストプロセッサーもURPファイルを生成するため、最初の2つのステップは任意です。しかし、スクリプトファイルとして実行するURPプログラムではなく、ユーザーが読み込めるURPプログラムを生成します。
3.プログラムを右クリックし、ロボットプログラムを生成(F6)を選択して
4.生成されたURPファイルをUSBメモリディスクに保存します。
5.USBメモリディスクをロボットのティーチペンダント(URのポリスコープ)に接続
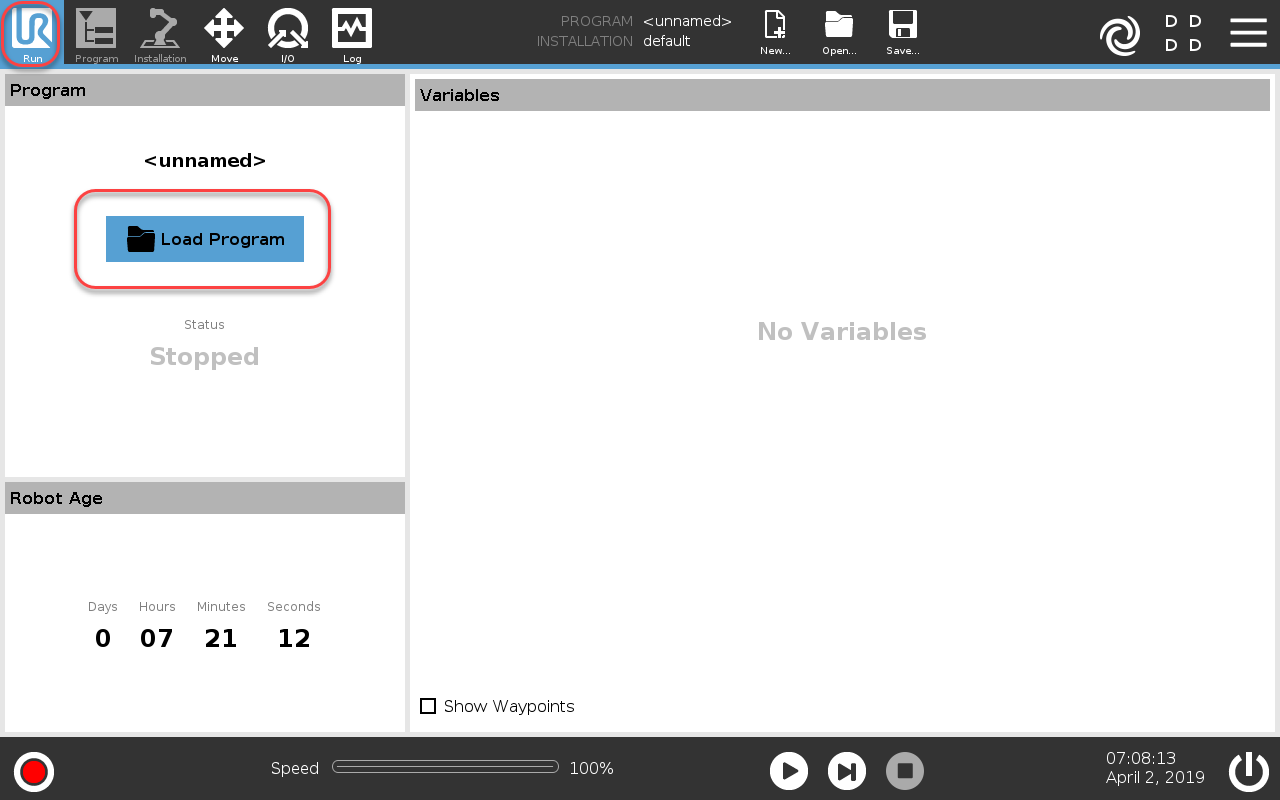
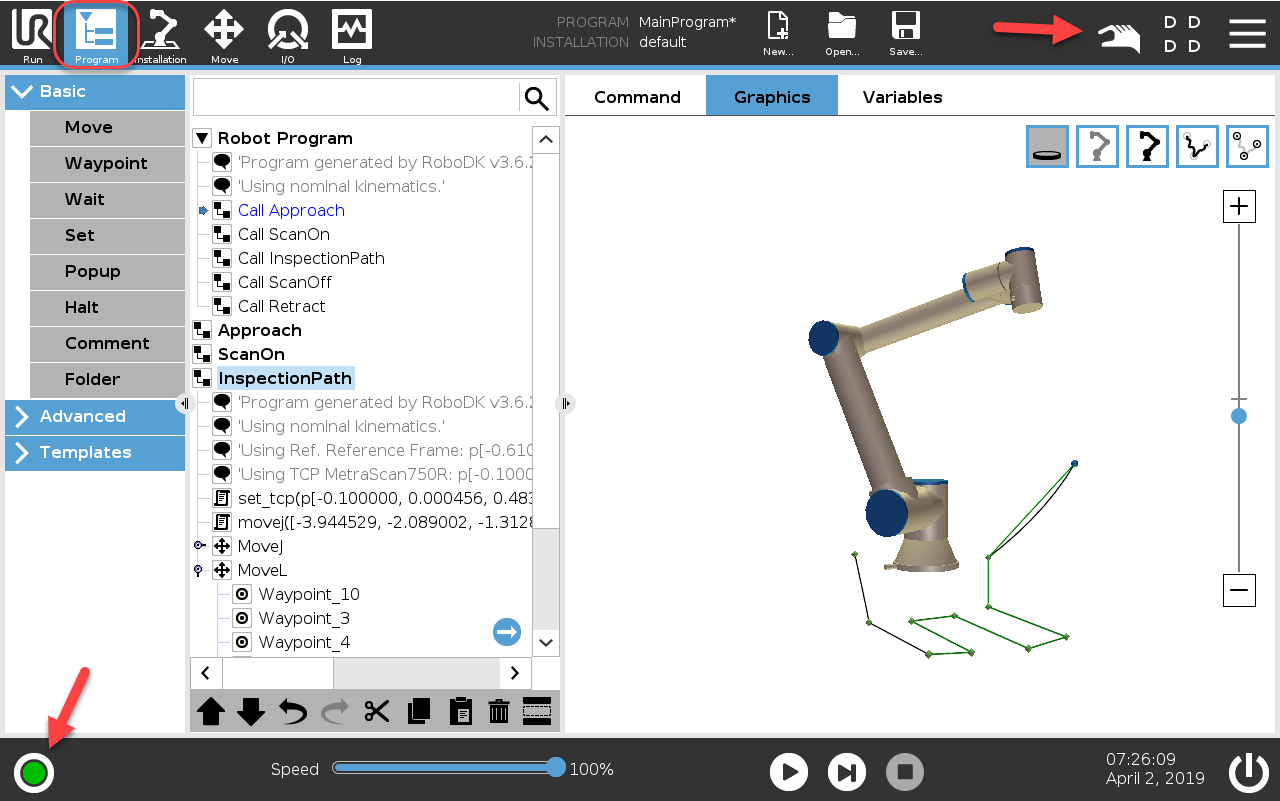
6.ロボットティーチペンダントで:実行タブを選択します
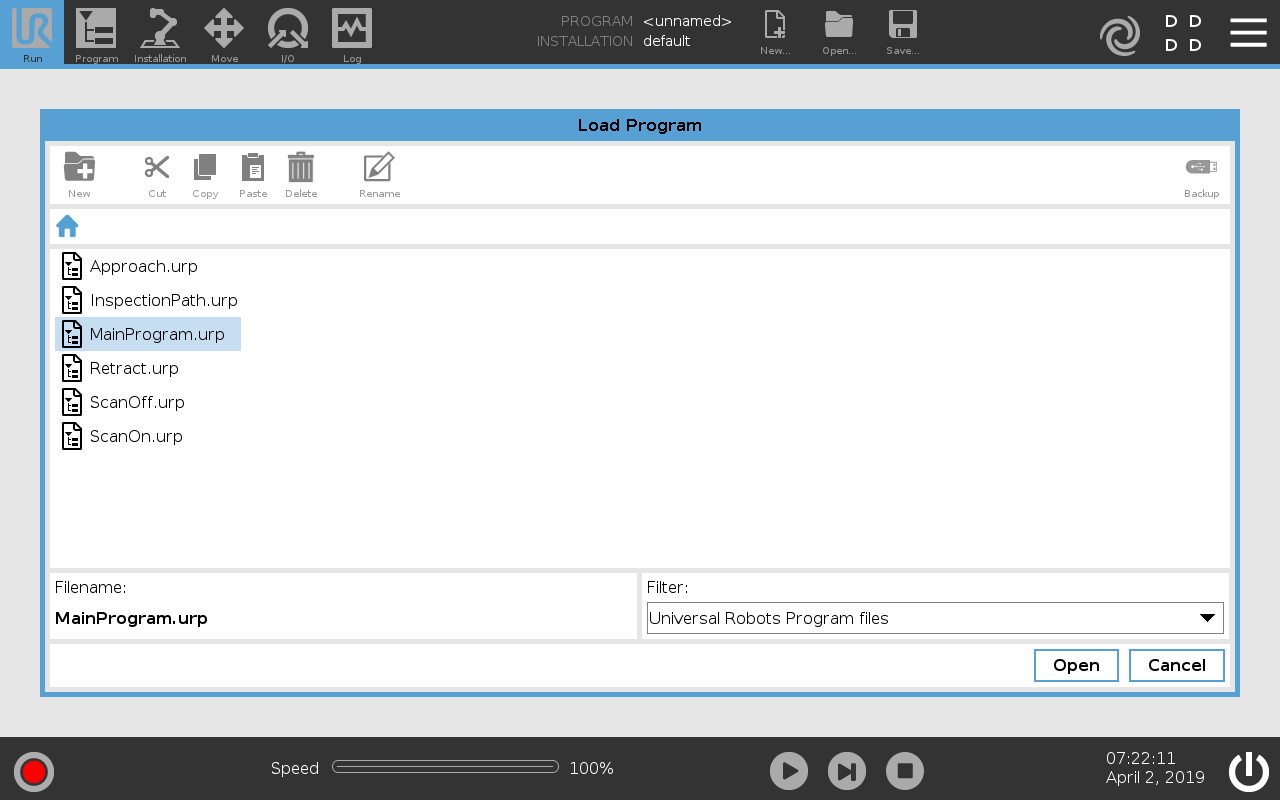
7.Load Programを選択し、RoboDKから生成されたプログラムを読み込みます
8.プログラムタブを選択し、再生ボタンで開始します
9.再生ボタンを選択してプログラムを開始します。
スクリプトファイルを読み込む方法#UR-Script
次の手順と画像は、ロボットでスクリプトプログラムを実行する手順をまとめたものです。これらの手順は、URPプログラムファイルを実行するために必要ではありません:
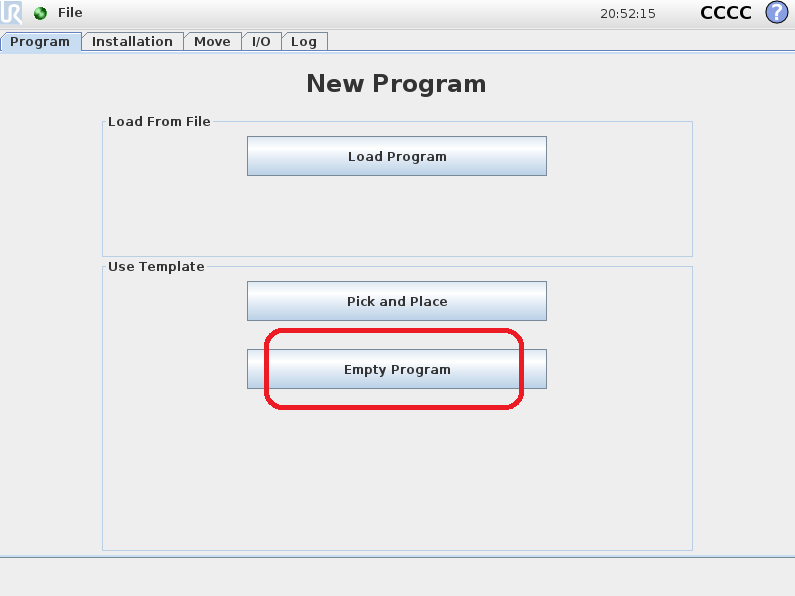
1.ティーチペンダントのメイン画面でProgram Robotを選択します
2.Empty Programを選択
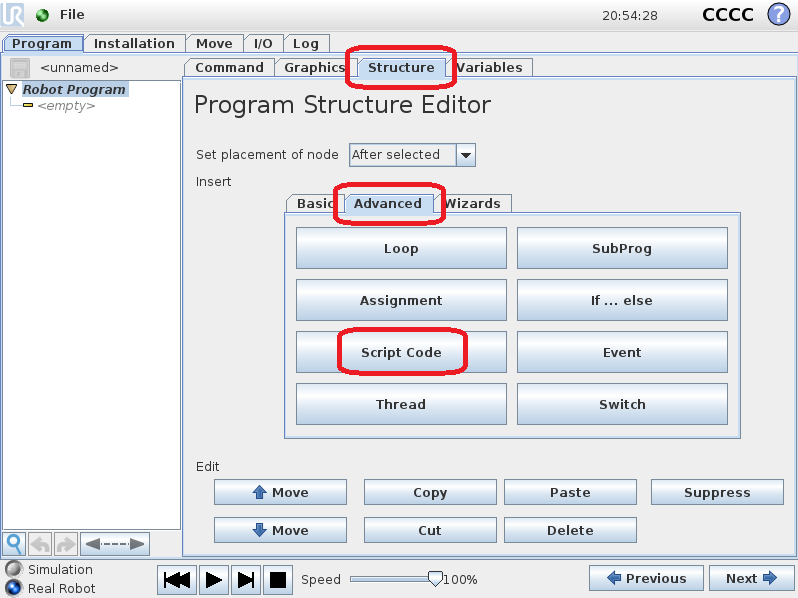
3.Structureタブを選択して
4.Advancedタブを選択してください
5.Script codeを選択
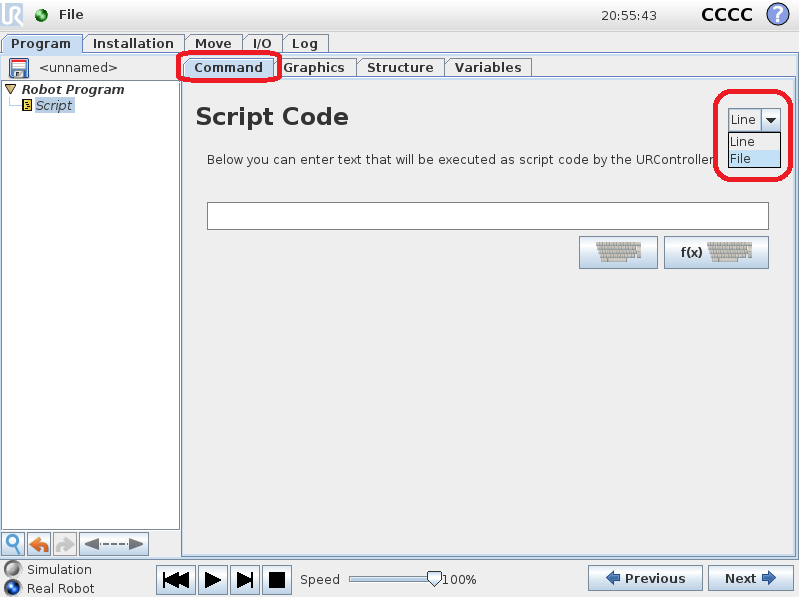
6.Fileを選択します(画像で示すように)
7.RoboDKによって生成されたスクリプトファイルを選択します
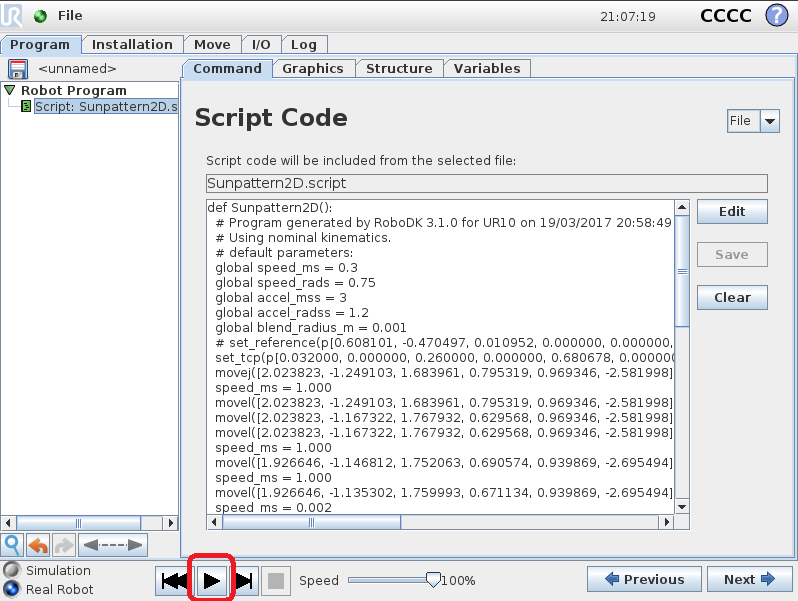
8.再生アイコンを選択してプログラムを実行させます
9.File ➔Saveを選択して変更を保存します
10.最後に、プログラムが実行できます