ロボット運動学の更新#
この項目の手順は任意であり、オフラインプログラミングで正確さが要求される特定の状況でのみ必要になります。この項目は、ロボットを正確にシミュレーションする為に、RoboDKでURロボットの固有の運動学的値を入力する方法について説明します。
URコントローラーの運動学は、ロボットごとに異なります。運動学は、DHテーブル(Denavit Hartenberg)の形式でロボットを定義する寸法です。RoboDKシミュレーターはデフォルトで公称UR運動学を使用するため、シミュレーターの運動学とコントローラーの運動学の間で2 mmから10 mmの不一致が発生する場合があります。
シミュレーションを実際のロボットと一致させるには、次の手順を辿って、URロボット固有の運動学がインポートできます。
1.実際のロボットを使用して生成されたURPファイルを取得してください(RoboDKまたはURシミュレーターを使用していないファイル)
2.RoboDKでロボットを開きます。URロボットはRoboDKライブラリで見つかります。既存のRoboDKプロジェクトで利用可能なURロボットを使用することもできます。
3.[ツール]-[スクリプトを実行] を選択します
4.UR_LoadControllerKinematicsを選択します
5.ロボットコントローラから抽出したURPファイルを選択してください。
次の画像に示すようなメッセージが表示されます。利用可能なURPファイルを読み込まなかった場合、または適切なURロボットを選択しなかった場合は、警告メッセージが表示される場合があります。
この手順が完了すると、ロボットを右クリックして[.robotとして保存] が選択できます。これらのパラメータはロボットファイルとともに保存され、新しいプロジェクトごとにこの手順を繰り返す代わりにロボットファイルが使用できます。
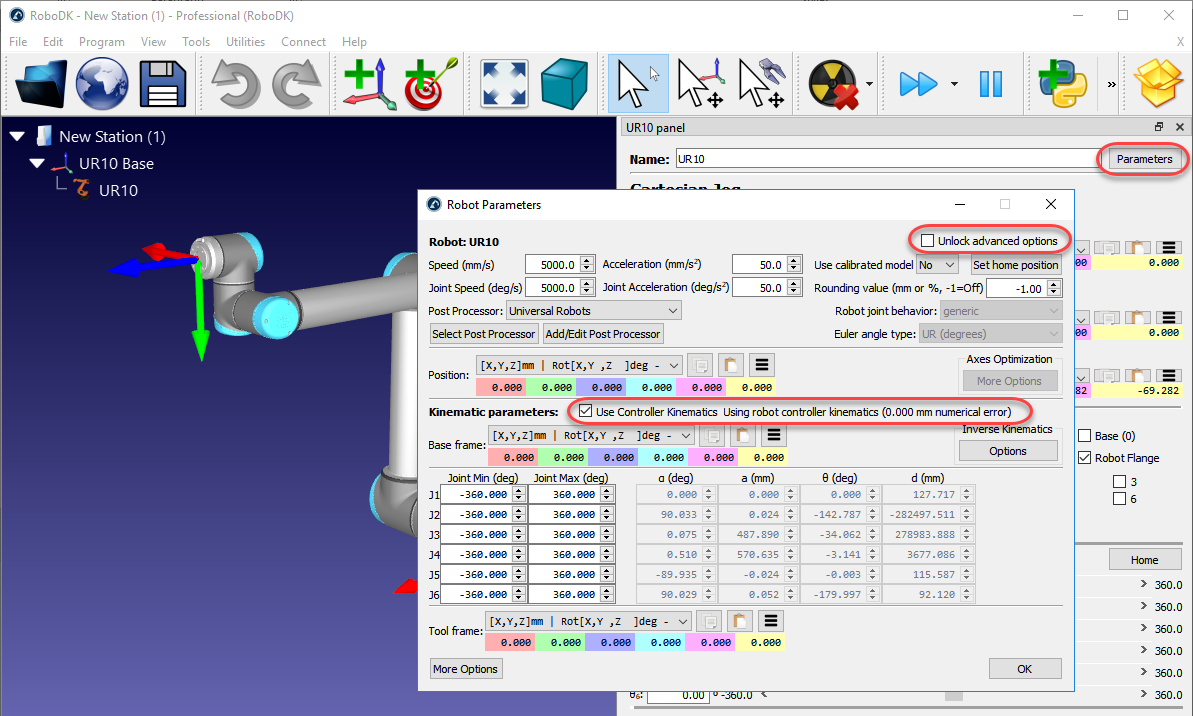
RoboDKは、URPファイルからロボットに固有の情報を抽出し、ロボットファイルでのシミュレーションとオフラインプログラミングに考慮します。次の画像で示すように、この設定を変更して、ロボットパラメータメニューでデフォルトの運動学に戻すことができます。
ティーチペンダントに表示されるポーズ情報が、RoboDKで表示する運動学と一致していることがわかります(RoboDKとURロボットのツールフレームと参照系を削除して比較してください)。
各ロボットは工場でURによって調整されているため、URの運動学はロボットによって異なります。KUKA、ABB、安川電機(Motoman)、ファナックなどの他のロボット販売者は、絶対精度の設定を購入しない限り、ロボットを調整しません。絶対精度の設定では、最大40以上の調整パラメータを考慮することができます。
この手順はRoboDKのロボット調整とは同じではありません。ロボットの調整は、実際のロボットの精度を向上させるのに役立ちます。