ロボットパラメータの較正
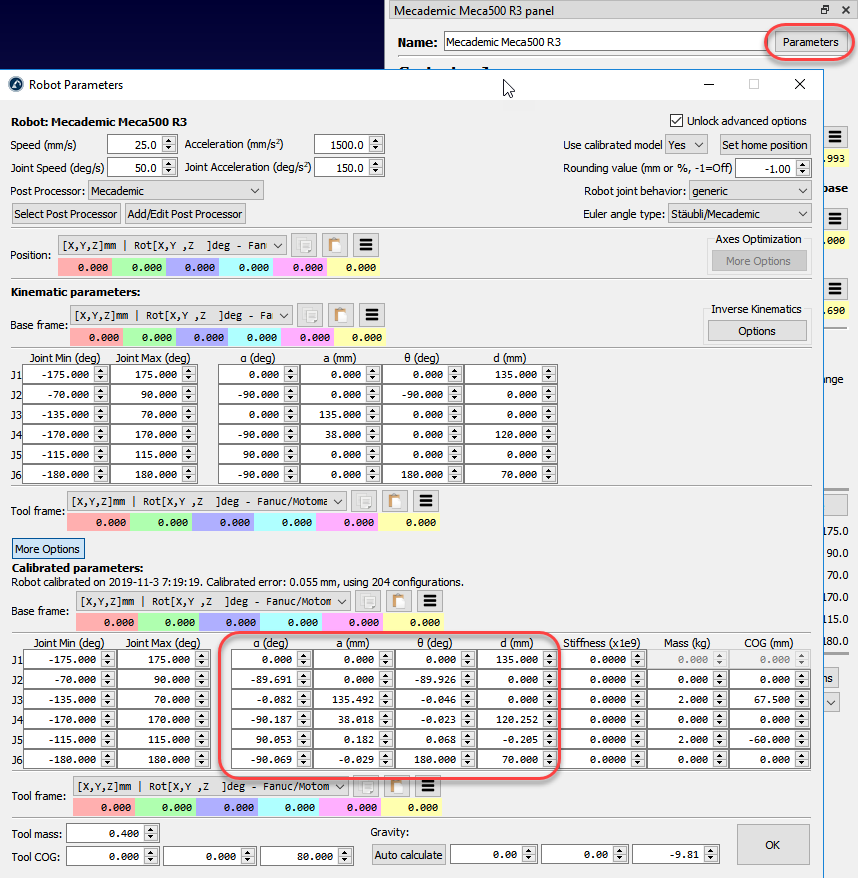
ロボットが較正されると、Parameters メニューから較正されたパラメータにアクセスできます。ロボットコントローラによっては、特定のロボットパラメータを変更することができます。
注意:RoboDKはDenatit-Hartenberg Modified規約を使用しています。選択/キャリブレーションされたパラメータをすべて使用してください。
重要:ロボットコントローラのパラメータを更新しても、フィルタリングされたプログラムが生成されないようにする必要があります。
ロボットが較正されると、Parameters メニューから較正されたパラメータにアクセスできます。ロボットコントローラによっては、特定のロボットパラメータを変更することができます。
注意:RoboDKはDenatit-Hartenberg Modified規約を使用しています。選択/キャリブレーションされたパラメータをすべて使用してください。