システム校正
このセクションでは、ロボットとプローブのキャリブレーションについて説明します。このステップは一度だけ行う必要がありますが、精度の良い結果を得るためには重要です。
キャリブレーションを開始する前に、セルの3Dモデルをロードすることをお勧めします。そうすることで、キャリブレーション中に自動的に衝突を避けることができます。各コンポーネントの3Dモデルがない場合は、アクセスしたくない領域を表すプレーンボックスや球をロードするだけでもかまいません。
ロボットキャリブレーション
このセクションでは、RoboDK TwinTrack と計測システムを使ってロボットを自動的にキャリブレーションする方法について説明します。ロボットのキャリブレーションを行うことで、オフラインでプログラムを作成したり、RoboDKのデモツールでTwinTrackティーチを使用したりする際に、ロボットの精度を最大0.150 mmまで向上させることができます(精度のレベルはロボットの品質やサイズに大きく依存します)。
ロボットのキャリブレーションは、ロボットセルを構築した後、または大きな変更(ツールのペイロードの変更など)を行った後に行うことをお勧めします。これにより、最高の精度を得ることができます。
キャリブレーションを開始する前に、RoboDK でセルをモデル化し、自動的に衝突を避けることができます。平面や立方体などの基本的な形状を使用して、不要な領域を避けることができます。また、ロボットの関節スペースを制限することもできます。
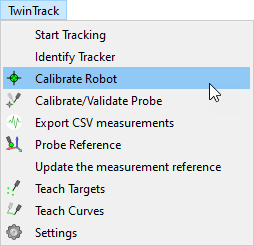
TwinTrack➔ Calibrate robotを選択すると、ロボットのキャリブレーション手順を開始できます。
この操作は、キャリブレーションと検証のためのポイントの自動生成を含む、ロボットのキャリブレーションを行うためのガイドとなります。RoboDKはトラッカーで見えるポイントを自動的に生成することができます。
ロボットのキャリブレーション手順では、約200回の測定が必要です。この手順では、まずロボットのホームポジション周辺の測定を行います
セットアップが完了し、ロボットとの通信が適切に確立されれば、較正手順には15~30分かかります。
このシステムは特別な治具やアクセサリーを必要とせず、単にトラッカーリファレンスに対して工具の位置をトラッキングします。
ターゲットが見えないため、測定に失敗しても構いません。
注:ロボットの較正方法の詳細については、ロボットの較正手順を参照してください。
プローブキャリブレーション
プローブの先端を適切に校正し、ご希望の許容範囲内で正確であることを確認することが重要です。
プローブの先端を校正するには、静止点の周囲で先端を動かします。
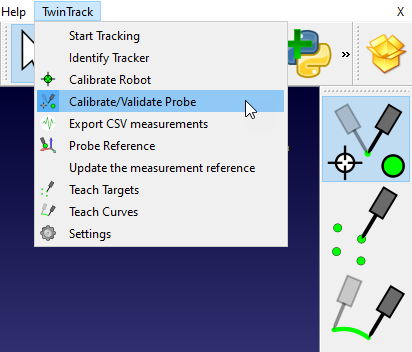
TwinTrack➔ Calibrate/Validate Probe Tipを選択して、ツールのキャリブレーションを開始します。
この場合、Creaform HandyProbeを使用しているため、Creaform VXElementsソフトウェアを使用してプローブを較正し、RoboDKを使用して検証できます。
プローブの先端を確認するには、静止点を移動するだけで、RoboDKが精度を表示します。
注:Creaform HandPROBEやLeica T-Probeなどの一部のプローブでは、工具の先端に仮想プローブが用意されている場合があり、これらのプローブを較正する必要はありません。
ヒント: TwinTrack➔ Export CSV Measurementsを選択して測定値を記録できます。
オフラインプログラミング
実際のロボットがなくても、デモンストレーションによるティーチング機能を使用することができます。つまり、実際のロボットにアクセスする前に、計測システムを使用してオフラインでのみロボットのシミュレーションとプログラミングを行うことができます。
単に、参照として使用できる、明確に定義された座標系を持つ部品が必要なだけです。
測定システムと部品の準備ができたら、以下の手順に従って測定装置の座標系を定義します:
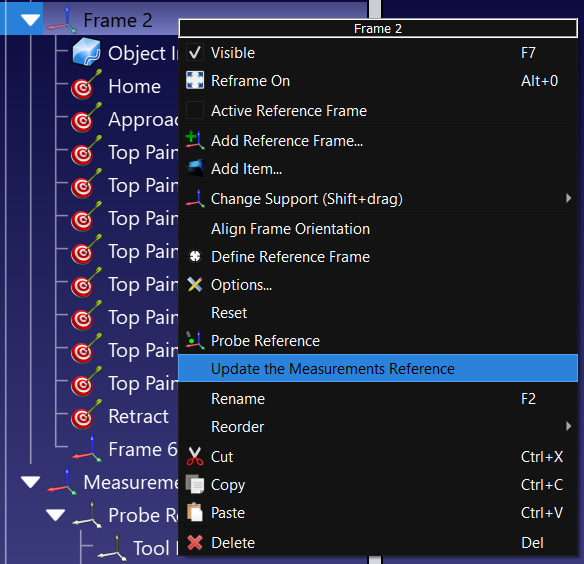
1.部品の座標系(または取り付けられている治具の座標系)を右クリックします。
2.測定リファレンスの更新を選択します。
3.画面の指示に従って、座標系を定義する3つの点(原点、X+上の点、Y+上の点)を教えます。
測定システムはそれに応じて更新され、ポイント、カーブ、または他の座標システムのティーチングに進むことができます。