プログラム・フィルタリング
ロボットが較正されたら、ロボットの較正を確実に利用するために、フィルタリングされたプログラムを生成したり、較正されたロボット・パラメータを考慮したりする必要があります。
キャリブレーション後、ロボットを正確にプログラミングするためには、以下の方法のいずれか1つだけに従う必要があります:
1.精度の高いプログラムを生成するには、RoboDK for オフラインプログラミングを使用してください(生成されたプログラムはすでにフィルタリングされています)。これは精度を最適化するために推奨されるオフラインプログラミングオプションです。
2.ロボットコントローラのパラメータ(リンク長、DH-DHMパラメータ、マスタリングパラメータなど)を較正します。
正確なオフラインプログラミング
ロボットがRoboDKでキャリブレーションされると、ロボットを右クリックしてUse accurate kinematicsを選択することで、正確なキネマティクスを有効にすることができます。
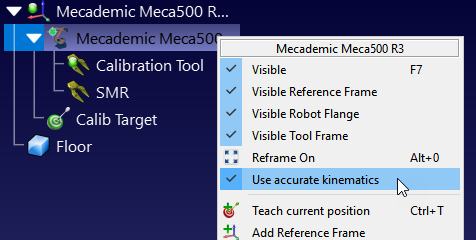
精度が有効であれば緑色の点が、無効であれば赤色の点が表示されます。
これは最適な精度を得るために推奨されるオプションです。RoboDK のロボット精度オプションを有効にすると、RoboDK で生成されるすべてのプログラムは自動的にフィルタリングされます。これは、ロボットの誤差を補正するためにすべてのデカルト座標がわずかに修正されることを意味します。
RoboDKでロボットを加工したり、NCファイルからロボットをプログラムしたり、RoboDKがサポートしているCAD/CAMプラグインを使用したりする場合には、このオプションが最適です。
重要一度プログラムを生成したら、ロボットの設定を変更しないようにしてください。
注意:ツールセンターポイント(TCP)とリファレンスフレームがRoboDKでキャリブレーションされ、定義されていることを確認してください(フィルタリングの前に実際のセットアップの値と一致させてください)。
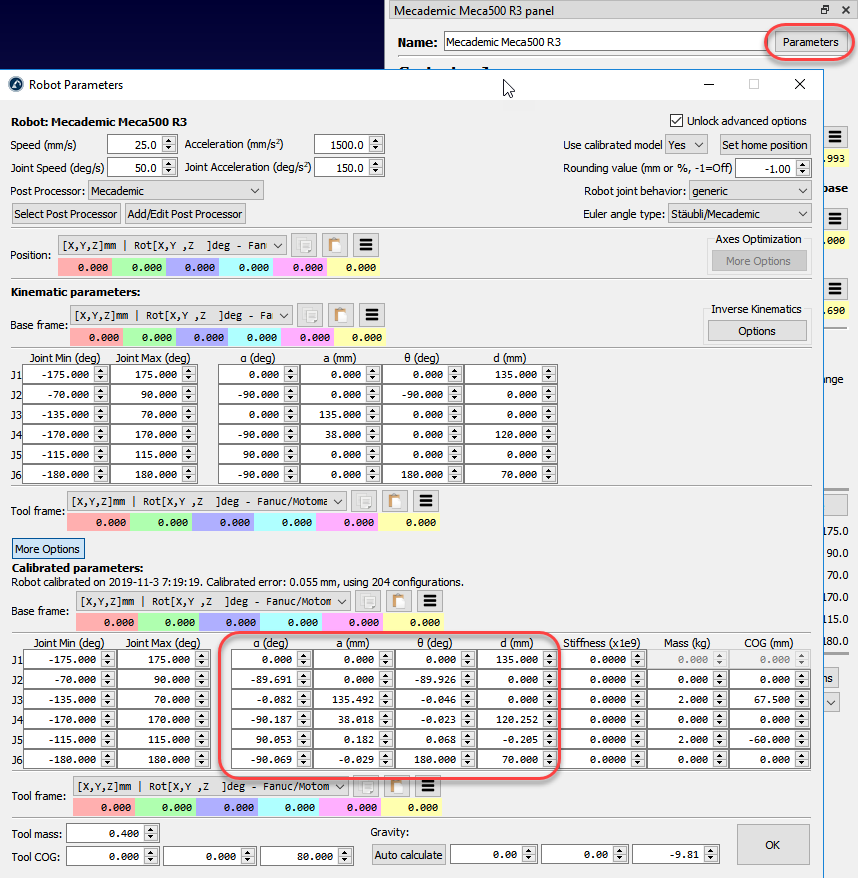
ロボットパラメータの較正
ロボットが較正されると、Parameters メニューから較正されたパラメータにアクセスできます。ロボットコントローラによっては、特定のロボットパラメータを変更することができます。
注意:RoboDKはDenatit-Hartenberg Modified規約を使用しています。選択/キャリブレーションされたパラメータをすべて使用してください。