座標系を教える
RoboDK TwinTrack を使用すると、座標系 (または参照フレーム) をプローブして、ロボットのワークスペース内のオブジェクトの位置を特定することができます。
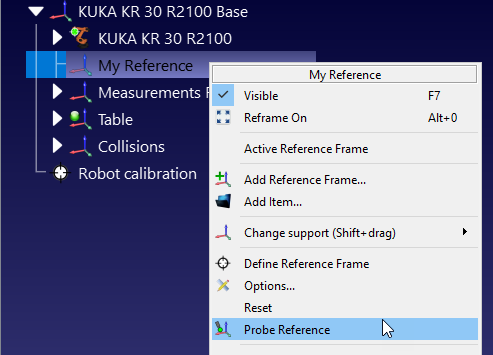
座標系を右クリックし、プローブ参照を選択します。
ヒント:カスタムリファレンスフレームがない場合は、必ずロボットのベースに新しいリファレンスフレームを追加してください(Program➔ Add-inリファレンスフレームを選択)。
そして、以下の順番で3つのポイントを探ってください:
1.原点の最初の点。
2.正のX軸に沿った2点目。
3.正のY軸に沿った3点目。
座標系を適切に設定することで、ロボットをリモートでプログラムすることができます。例えば、適切に定義されたフィクスチャーがあれば、新しいパーツをプログラムしたいときに、ロボットの近くにいなくても、オフィスや自宅から簡単に行うことができます。
ビデオRoboDK TwinTrackを使った座標系の作成方法https://youtu.be/IP2UMXQk-nY?t=32。