オフラインプログラミング
実際のロボットがなくても、デモンストレーションによるティーチング機能を使用することができます。つまり、実際のロボットにアクセスする前に、計測システムを使用してオフラインでのみロボットのシミュレーションとプログラミングを行うことができます。
単に、参照として使用できる、明確に定義された座標系を持つ部品が必要なだけです。
測定システムと部品の準備ができたら、以下の手順に従って測定装置の座標系を定義します:
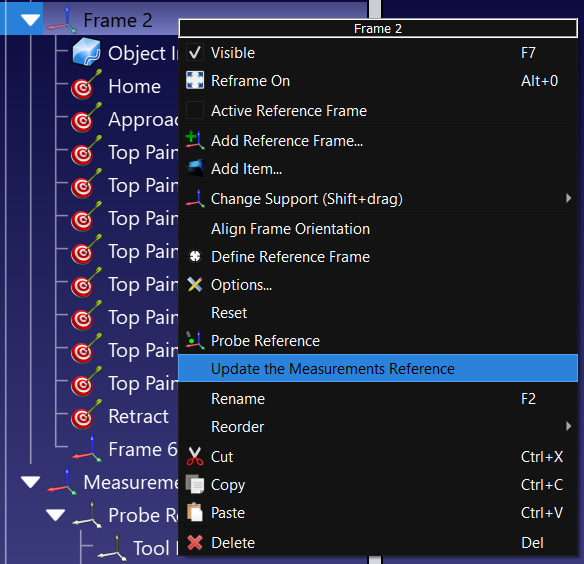
1.部品の座標系(または取り付けられている治具の座標系)を右クリックします。
2.測定リファレンスの更新を選択します。
3.画面の指示に従って、座標系を定義する3つの点(原点、X+上の点、Y+上の点)を教えます。
測定システムはそれに応じて更新され、ポイント、カーブ、または他の座標システムのティーチングに進むことができます。