リファレンスフレームとツールフレーム
RoboDK にはリファレンスフレームやツールフレームを較正するためのユーティリティが用意されています。これらのツールは、それぞれ Utilities➔ Calibrate Reference frame と Utilities➔ Calibrate Tool frameからアクセスできます。
基準フレームや自動較正されていないツール(それぞれユーザーフレームやTCPとも呼ばれます)を較正するためには、3点以上に接するロボットの構成が必要です。RoboDKのメイン画面にロボットの関節をコピーペーストすることで)RoboDK上で実際のロボット構成を確認しやすくなるため、デカルト座標ではなく関節値を使うことをお勧めします。
重要:ロボットのキャリブレーションを行う際には、デカルト座標の代わりに関節値を使用することを強くお勧めします。関節値を使用すると、ロボットの精度が考慮され、TCPをより正確にティーチングすることができます。
ツールキャリブレーション
ユーティリティ➔ キャリブレーションツールを選択し、RoboDK を使って TCP のキャリブレーションを行います。必要な数のポイントを、さまざまな向きで使用することができます。TCPの推定値が向上し、TCP誤差の推定値も向上します。
注:詳しくはヒントをご覧ください。
基準フレーム校正
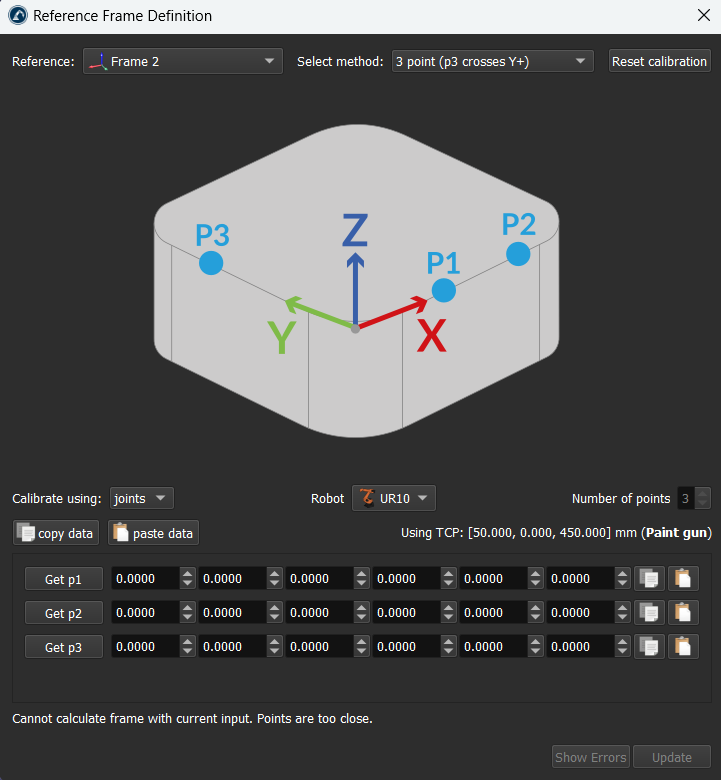
Utilities➔ Calibrate reference を選択して、基準フレームを較正します。さまざまな方法で基準フレームを設定することができます。図の例では、基準フレームは3つの点によって定義されます:点1と2はX軸方向を定義し、点3は正のY軸を定義します。
重要:ロボットアームの精度が基準フレームをより明確にするのに役立つため、基準フレームを較正する前に関節ターゲットを使用し、ロボットの精度をアクティブにすることをお勧めします。
注:基準フレームの較正に関する詳しい情報は、ヒントのセクションをご覧ください。