セットアップ
ツイントラックシステムを使用するには、RoboDKでロボットを読み込み、ロボットと計測システムに接続する必要があります。オプションで、オブジェクトやツールの3Dモデルを追加してセルをモデル化することができます。これにより衝突を防ぐことができます。
8.ロボットをロードします:
a.ファイル➔ オンラインライブラリを開く を選択します。オンラインライブラリがRoboDKに表示されます。
b.フィルターを使ってロボットをお探しください。
c.ダウンロードを選択すると、RoboDKステーションにロボットが自動的にロードされます。
d.または、オンラインライブラリ(https://robodk.com/library)からロボットファイルを直接ダウンロードし、RoboDKで開いてください(.robotファイル)。
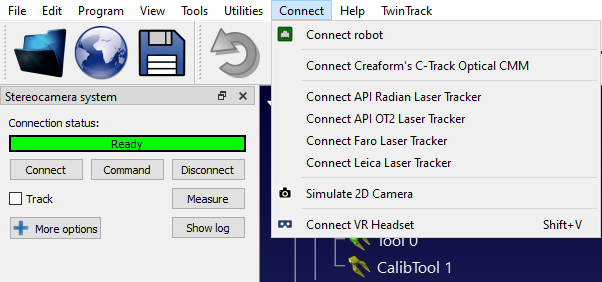
9.測定システムを接続します:
a.測定システムをコンピュータに接続します。
b.Connect を選択し、測定システムに接続します。必要なソフトウェアもインストールされていることを確認してください。使用する測定システムによっては、トラッカーのIPを変更する必要があります。
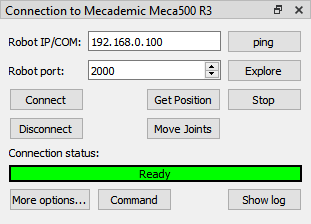
10.ロボットを接続します:
a.接続➔接続ロボットを選択します。
b.ロボットのIPとポートを入力してください。
c.接続を選択します。
注:ロボットコントローラによっては、特定のセットアップまたは特定のソフトウェアオプションに従う必要があります。詳しくはロボットドライバーのセクションをご覧ください。