RoboDK ツイントラック
RoboDK TwinTrack を使用すると、人間の動きをロボットで簡単に模倣・再現し、高速で信頼性の高い自動化を実現できます。手で製造作業を行うのと同じように、ロボットに手動で経路を教え、それを追跡してロボットで再生することができます。
イントロダクション
RoboDK TwinTrackは、デモンストレーションによるロボットのティーチングに新しい方法を提供し、塗装、研磨、バリ取り、ディスペンス、溶接など、さまざまな製造アプリケーションに使用できます。
TwinTrackのようなTeach by Demonstration方式を使う利点のひとつは、自分の手で製造作業を模倣することができ、ロボットが同じ動きを再現してくれることです。このロボットプログラミングの方法では、3Dモデルを使用する必要はありません。オペレーターがコンピュータを使う必要もありません。これにより、時間を大幅に節約することができ、より早くロボットのプログラミングを開始することができます。

RoboDK TwinTrackを使用するには、6D測定システムとハンドヘルドプローブ、または手元で製造作業を模倣できるハンドヘルド製造ツールが必要です。
RoboDKは90以上のロボットメーカーから1000以上のロボットをサポートしています。つまり、RoboDKがサポートするあらゆるロボットアームをプログラミングすることができます。また、独自のロボットや機構を作成することもできます。
TwinTrackと RoboDKキャリブレーションツールを使えば、高精度のロボットプログラムを作成することができます。優れた測定システムを使用すれば、最大0.150 mmの位置精度を達成できます。精度のレベルはロボットの品質とサイズに大きく依存します。RoboDKキャリブレーションツールを使用することで、デジタルツインを正確に作成することができます。
ビデオRoboDK TwinTrackの紹介: https://youtu.be/hFHZKQNVXrM?t=30。
必要条件
TwinTrackツールを使用するには、RoboDK TwinTrack Add-inをインストールし、サポートされている計測システムが必要です。
以下のものをご用意ください:
1.1つまたは複数の産業用ロボットアーム。
2.サポートされている測定システム(6 DOF)。サポートされる測定システムには以下が含まれます:
a.HTC Viveトラッカー(SteamVR)
b.フルバーチャルリアリティキット(SteamVR)
c.6自由度のレーザートラッカーとRoboDKドライバをサポート
d.Creaform Cトラック
e.OptiTrackカメラシステム(最高の精度を得るにはPrimeX13を4台使用することをお勧めします。)
注:TwinTrackのライセンスには、互換性のある測定システムは含まれていません。RoboDKでは計測システムの製造・販売は行っておりません。
重要: HTC Viveトラッカーやバーチャルリアリティベースステーションは、精度のために作られたものではありません。最高の精度を得るには、レーザートラッカーなどの適切な計測システムが必要です。
1.RoboDKソフトウェアがインストールされ、TwinTrackの適切なライセンスがインストールされている必要があります。
2.ロボットプログラムを自動的に実行するには、ロボットコントローラ用の互換性のあるロボットドライバが必要です。
3.TwinTrack RoboDK Add-inをインストールします:
a.TwinTrackアドイン(.rdkpファイル)をダウンロードしてください。
b.ファイルをダブルクリックしてAdd-inをインストールし、RoboDKで開きます。
c.TwinTrackメニューが表示されない場合: Tools➔ Add-in Managerを選択し、TwinTrackをダブルクリックすると、右上にTwinTrackメニューが表示されます。
注意: RoboDKアドインはアドインマネージャを有効にする必要があります。このプラグインは TwinTrack rdkp ファイルを開いたときに自動的に読み込まれるはずです。そうでない場合は、アドインマネージャのドキュメントを参照してください。
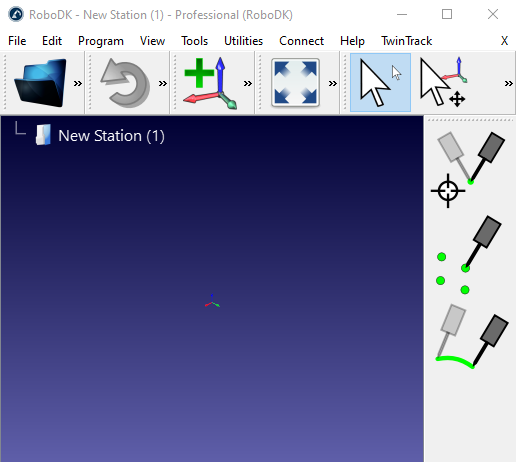
注: TwinTrackメニューとツールバーは、画像のように自動的に表示されます。TwinTrackアドイン(または他のアドイン)の表示/非表示は、Tools➔ Add-in Managerを選択し、アドインのEnabledタグをダブルクリックすることで行えます。
SteamVRとHTC Viveトラッカーのセットアップ
このセクションでは、SteamVR を設定する手順を説明します。トラッカー付きのカスタムメイドのツールを使用して、製造作業を手で模倣し、ロボットが同じ動きを再生できるようにします。
RoboDK TwinTrackはバーチャルリアリティシステムをサポートし、HTC Viveトラッカーv1からv3を含むSteamVRがサポートするすべてのトラッカーに対応しています。
注:HTC Viveトラッカーは、RoboDK TwinTrackを使用するための最も手頃なソリューションです。2台のトラッカーと2台のValve Indexベースステーションを備えたフルシステムは、2,000米ドル以下で購入できます。トラッカーをカスタムプローブやツールに取り付けることで、手作業による製造作業を模倣することができます。
重要: 2024年4月現在、RoboDKはSteamVRのスタンドアロンインストールを提供しており、SteamのインストールやSteamVR設定ファイルの編集の必要がありません: https://robodk.com/downloads/private/SteamVR-TwinTrack-v1.27.5.zip。スタンドアロン版をご利用の場合は、ステップ#4まで飛ばしてください。
以下の手順に従って、SteamVR システムを TwinTrack 用に設定してください:
1.まだSteamをインストールしていない場合は、Steamのアカウントを作成する必要があります。
2.SteamVRをインストールしてください。これは、バーチャルリアリティと6Dトラッキングのサポートを追加するSteam拡張機能です。
3.バーチャルリアリティヘッドセットをお持ちでない方、または必要ない方は、以下の手順で必要性を取り除いてください:
a.以下のファイルをテキストエディタで編集してください:
C:/Program Files (x86) /SteamApps/common/SteamVR/drivers/null/resources/settings/を編集してください。
default.vrsettings
そして設定:
"enable": true, (デフォルトはfalse)
b.以下のファイルをテキストエディタで編集してください:
C: /Program Files (x86) /SteamApps/common/SteamVR/resources/settings/を編集してください。
default.vrsettings
そして設定:
"requireHmd": false, (デフォルトはtrue)
"forcedDriver":"null", (デフォルトは空の"")
"activateMultipleDrivers": true, (デフォルトはfalse)
SteamVRを終了し、再度開きます。
4.SteamVRを開き、指示に従ってシステムを設定します。VRヘッドセットを使用していない場合は、すべてのデフォルト設定を受け入れることができます。
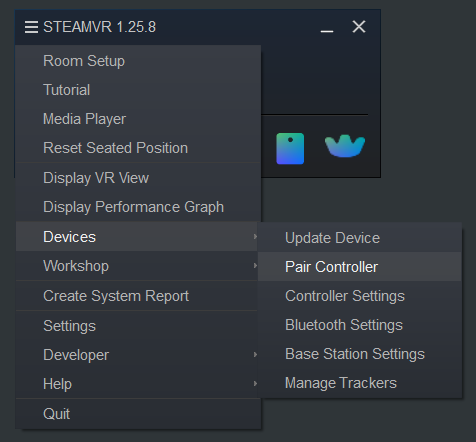
5.トラッカーをプローブとしてペアリングします:
a.トラッカーの電源ボタンを 2 秒間押し続けてオンにします(ペアリングされていないトラッカーはトラッカーランプが青く点灯します)。
b.メニューを開く➔デバイス➔ペアコントローラ
c.オプションを選択します:HTC ViveTrackerを選択します。トラッカーは自動的にペアリングされ、トラッカーランプが緑色に点灯します。
リンクを解除するには、電源ボタンを2秒間押し続けると、ランプが青色に変わります(点滅する場合もあります)。
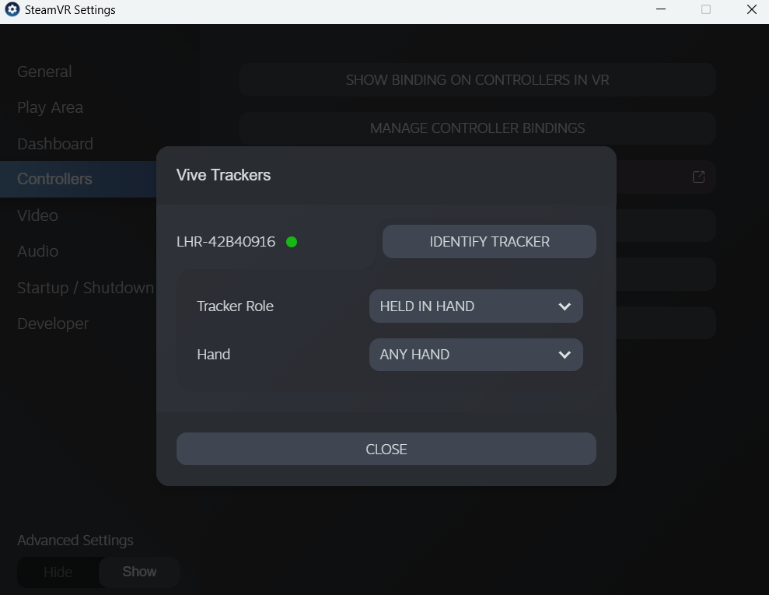
6.トラッカーの役割をHeld in handに設定します。
a.SteamVR メニュー➔設定を選択します。
b.コントローラーの選択
c.トラッカーの管理
d.セット・トラッカー役割➔手持ち
e.任意のハンドに設定(デフォルト)
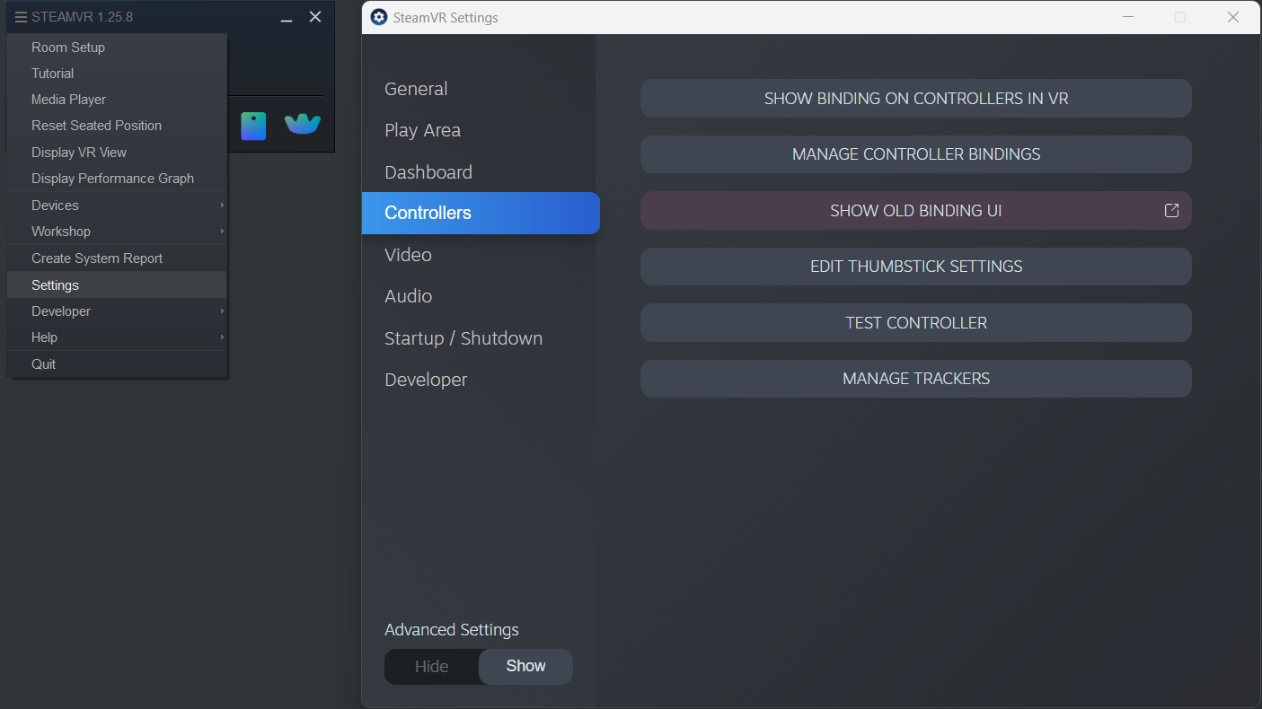
7.コントローラのバインディングをカスタマイズ:
a.SteamVR➔設定を選択します。
b.詳細設定➔表示
c.コントローラーの選択
d.古いバインディングを表示するUIを選択
e.RoboDKを選択してください。
f.現在のコントローラーを選択し、Vive Tracker in Handに設定します。
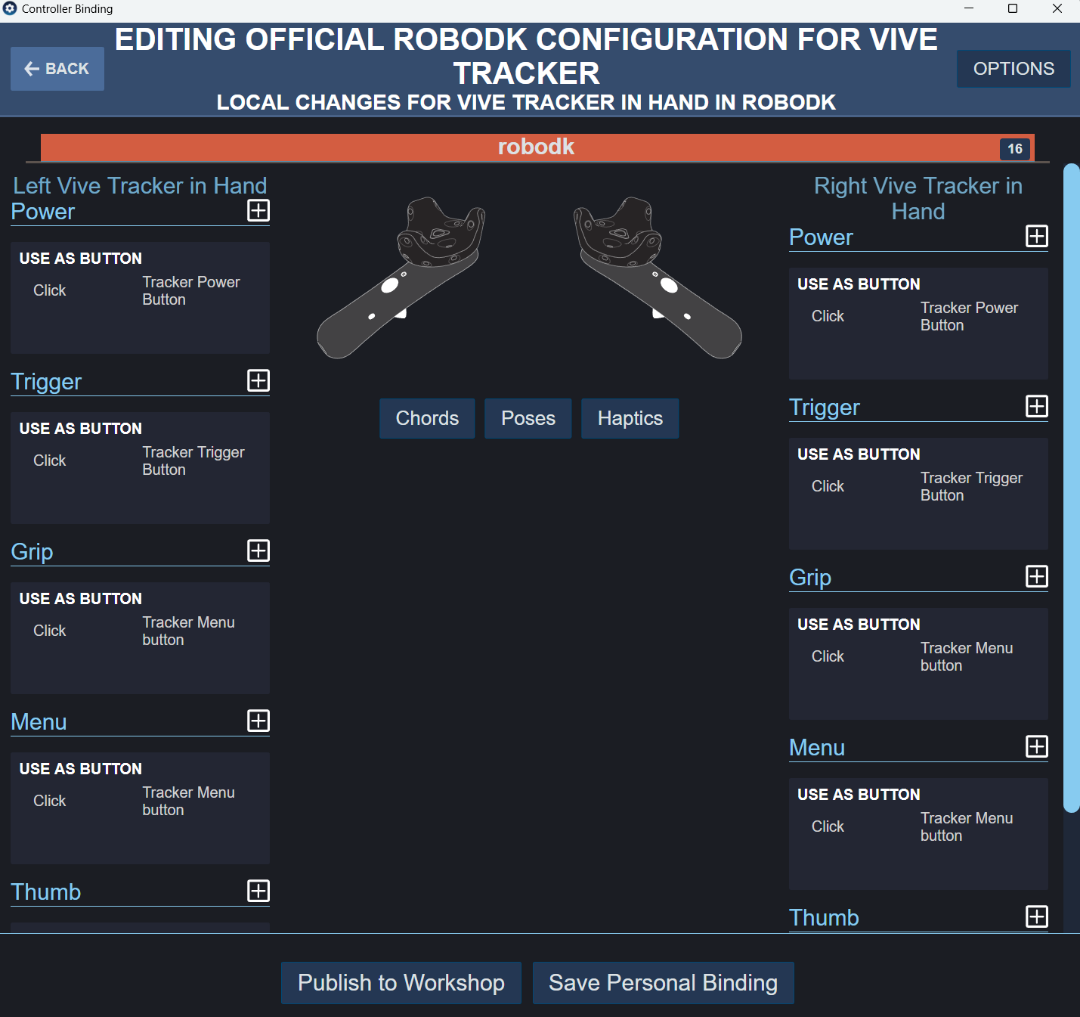
g.現在のバインディングで編集を選択
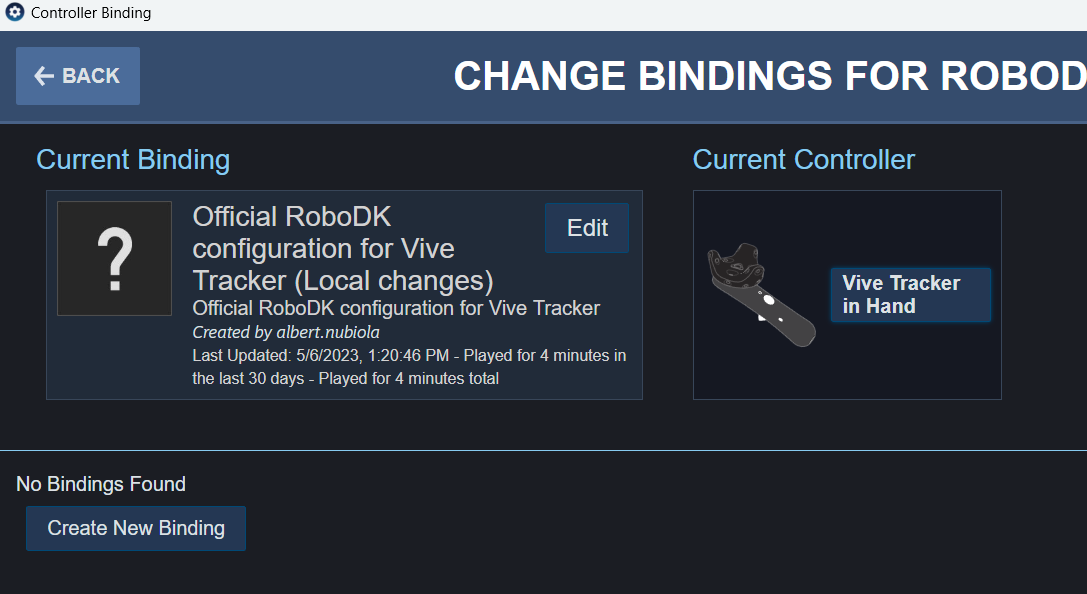
h.トラッカーのデフォルトのバインディングが表示されるはずです。
セットアップ
ツイントラックシステムを使用するには、RoboDKでロボットを読み込み、ロボットと計測システムに接続する必要があります。オプションで、オブジェクトやツールの3Dモデルを追加してセルをモデル化することができます。これにより衝突を防ぐことができます。
8.ロボットをロードします:
a.ファイル➔ オンラインライブラリを開く を選択します。オンラインライブラリがRoboDKに表示されます。
b.フィルターを使ってロボットをお探しください。
c.ダウンロードを選択すると、RoboDKステーションにロボットが自動的にロードされます。
d.または、オンラインライブラリ(https://robodk.com/library)からロボットファイルを直接ダウンロードし、RoboDKで開いてください(.robotファイル)。
9.測定システムを接続します:
a.測定システムをコンピュータに接続します。
b.Connect を選択し、測定システムに接続します。必要なソフトウェアもインストールされていることを確認してください。使用する測定システムによっては、トラッカーのIPを変更する必要があります。
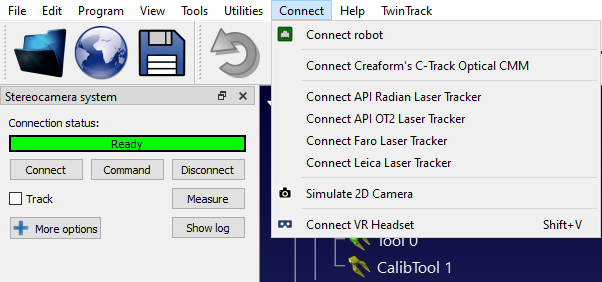
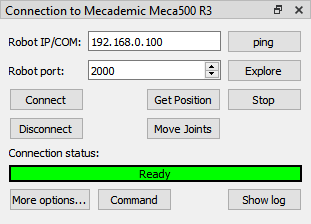
10.ロボットを接続します:
a.接続➔接続ロボットを選択します。
b.ロボットのIPとポートを入力してください。
c.接続を選択します。
注:ロボットコントローラによっては、特定のセットアップまたは特定のソフトウェアオプションに従う必要があります。詳しくはロボットドライバーのセクションをご覧ください。
システム校正
このセクションでは、ロボットとプローブのキャリブレーションについて説明します。このステップは一度だけ行う必要がありますが、精度の良い結果を得るためには重要です。
キャリブレーションを開始する前に、セルの3Dモデルをロードすることをお勧めします。そうすることで、キャリブレーション中に自動的に衝突を避けることができます。各コンポーネントの3Dモデルがない場合は、アクセスしたくない領域を表すプレーンボックスや球をロードするだけでもかまいません。
ロボットキャリブレーション
このセクションでは、RoboDK TwinTrack と計測システムを使ってロボットを自動的にキャリブレーションする方法について説明します。ロボットのキャリブレーションを行うことで、オフラインでプログラムを作成したり、RoboDKのデモツールでTwinTrackティーチを使用したりする際に、ロボットの精度を最大0.150 mmまで向上させることができます(精度のレベルはロボットの品質やサイズに大きく依存します)。
ロボットのキャリブレーションは、ロボットセルを構築した後、または大きな変更(ツールのペイロードの変更など)を行った後に行うことをお勧めします。これにより、最高の精度を得ることができます。
キャリブレーションを開始する前に、RoboDK でセルをモデル化し、自動的に衝突を避けることができます。平面や立方体などの基本的な形状を使用して、不要な領域を避けることができます。また、ロボットの関節スペースを制限することもできます。
TwinTrack➔ Calibrate robotを選択すると、ロボットのキャリブレーション手順を開始できます。
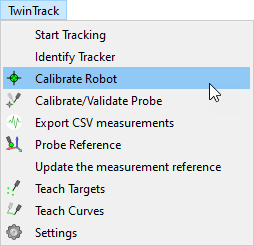
この操作は、キャリブレーションと検証のためのポイントの自動生成を含む、ロボットのキャリブレーションを行うためのガイドとなります。RoboDKはトラッカーで見えるポイントを自動的に生成することができます。
ロボットのキャリブレーション手順では、約200回の測定が必要です。この手順では、まずロボットのホームポジション周辺の測定を行います
セットアップが完了し、ロボットとの通信が適切に確立されれば、較正手順には15~30分かかります。
このシステムは特別な治具やアクセサリーを必要とせず、単にトラッカーリファレンスに対して工具の位置をトラッキングします。
ターゲットが見えないため、測定に失敗しても構いません。
注:ロボットの較正方法の詳細については、ロボットの較正手順を参照してください。
プローブキャリブレーション
プローブの先端を適切に校正し、ご希望の許容範囲内で正確であることを確認することが重要です。
プローブの先端を校正するには、静止点の周囲で先端を動かします。
TwinTrack➔ Calibrate/Validate Probe Tipを選択して、ツールのキャリブレーションを開始します。
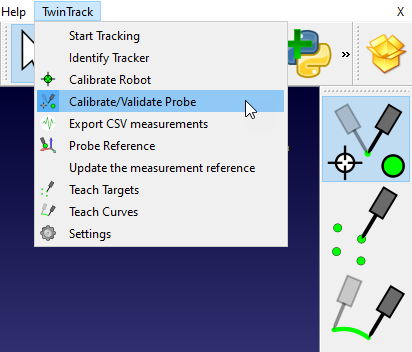
この場合、Creaform HandyProbeを使用しているため、Creaform VXElementsソフトウェアを使用してプローブを較正し、RoboDKを使用して検証できます。
プローブの先端を確認するには、静止点を移動するだけで、RoboDKが精度を表示します。
注:Creaform HandPROBEやLeica T-Probeなどの一部のプローブでは、工具の先端に仮想プローブが用意されている場合があり、これらのプローブを較正する必要はありません。
ヒント: TwinTrack➔ Export CSV Measurementsを選択して測定値を記録できます。
オフラインプログラミング
実際のロボットがなくても、デモンストレーションによるティーチング機能を使用することができます。つまり、実際のロボットにアクセスする前に、計測システムを使用してオフラインでのみロボットのシミュレーションとプログラミングを行うことができます。
単に、参照として使用できる、明確に定義された座標系を持つ部品が必要なだけです。
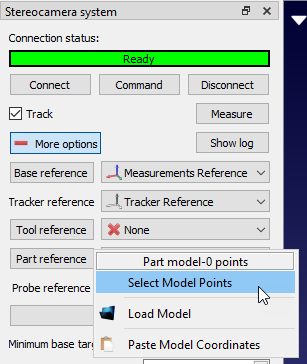
測定システムと部品の準備ができたら、以下の手順に従って測定装置の座標系を定義します:
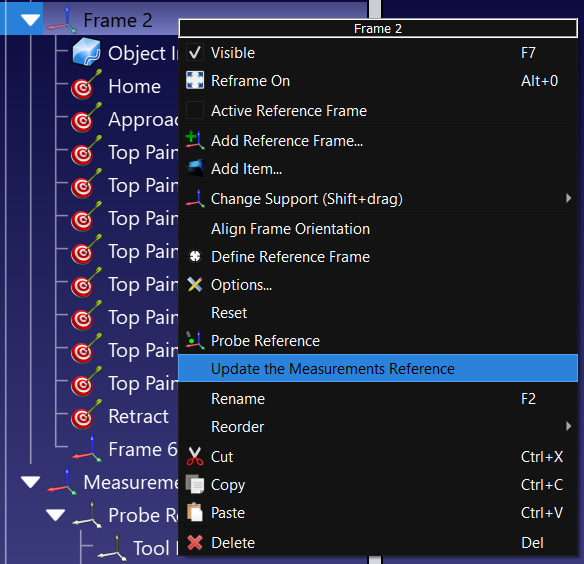
1.部品の座標系(または取り付けられている治具の座標系)を右クリックします。
2.測定リファレンスの更新を選択します。
3.画面の指示に従って、座標系を定義する3つの点(原点、X+上の点、Y+上の点)を教えます。
測定システムはそれに応じて更新され、ポイント、カーブ、または他の座標システムのティーチングに進むことができます。
ティーチ・ターゲット
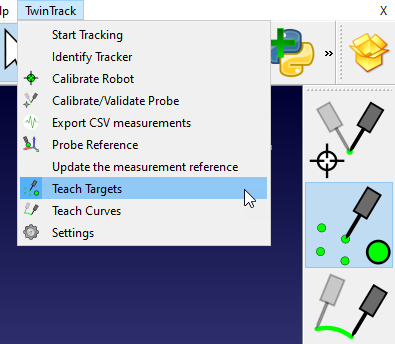
RoboDK TwinTrackでは、プローブでポイントをティーチングして、ロボットのターゲットを手動で作成することができます。
TwinTrack➔ Teach Targetsを選択すると、ティーチターゲットモードを開始できます。このボタンは、デフォルトでTwinTrackツールバーにもあります。
RoboDKは手の位置からロボットの位置をリアルタイムで計算し、表示します。ロボットが到達可能なエリアを簡単に確認できます。
ヒントTCPの向きを変更すると、RoboDKが選択したロボットのデフォルトの向きが変更されます。
ターゲット作成オプションを使用すると、ボタンを押すたびに1つのターゲットをティーチングすることになります。プログラムを作成したい場合は、プローブの2番目のボタンを押すと、RoboDKがプログラムをシミュレートします:
●第一ボタン:ターゲットを教える
●第二ボタン:RoboDKでプログラムを作成し、シミュレーションを行います。
●第2ボタンを押したまま:ロボット上でプログラムを実行します。
ビデオRoboDK TwinTrackを使ったターゲットの作成方法: https://youtu.be/xiFEHs1GMdg?t=28.
注:TwinTrack➔ Settingsを選択することで、アプローチ距離や操作速度などの設定を変更できます。
カーブを教える
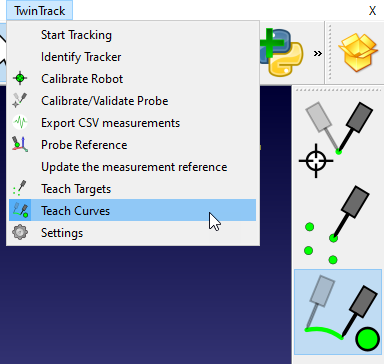
RoboDK TwinTrackを使えば、プローブを使ってロボットのパスやカーブを手動で作成することができます。
TwinTrack➔ Teach Curvesを選択すると、ティーチターゲットモードを開始できます。このボタンは、デフォルトでTwinTrackツールバーにもあります。
RoboDKは手の位置からロボットの位置をリアルタイムで計算し、表示します。ロボットが到達可能なエリアを簡単に確認できます。
プローブの第一ボタンを押したまま、カーブを作成することができます。プログラムを作成したい場合は、プローブの2番目のボタンを押すと、RoboDKがプログラムを作成し、シミュレーションを行います:
●最初のボタンを押したまま:カーブ/パスを教えます。
●第二ボタン:RoboDKでプログラムを作成し、シミュレーションを行います。
●第2ボタンを押したまま:ロボット上でプログラムを実行します。
ビデオRoboDK TwinTrackを使った曲線の作成方法: https://youtu.be/_Tu4dj88Vv4?t=44。
注:TwinTrack➔ Settingsを選択することで、動作速度やプログラム名パタンなどの設定を変更できます。
座標系を教える
RoboDK TwinTrack を使用すると、座標系 (または参照フレーム) をプローブして、ロボットのワークスペース内のオブジェクトの位置を特定することができます。
座標系を右クリックし、プローブ参照を選択します。
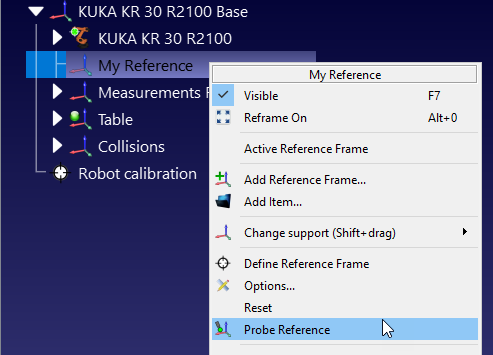
そして、以下の順番で3つのポイントを探ってください:
1.原点の最初の点。
2.正のX軸に沿った2点目。
3.正のY軸に沿った3点目。
座標系を適切に設定することで、ロボットをリモートでプログラムすることができます。例えば、適切に定義されたフィクスチャーがあれば、新しいパーツをプログラムしたいときに、ロボットの近くにいなくても、オフィスや自宅から簡単に行うことができます。
ビデオRoboDK TwinTrackを使った座標系の作成方法https://youtu.be/IP2UMXQk-nY?t=32。
動くカーブを教える
測定システムが複数のオブジェクトの同時トラッキングをサポートしている場合、カーブ、ターゲット、座標系を移動するオブジェクト上に作成することができます。これは、静的なオブジェクトと同じ手順で行うことができます。
主な違いは、移動体をリアルタイムで追跡する必要があることです(トラッカーまたは反射ターゲットを使用)。たとえば、Creaform C-Track測定システムを使用する場合は、部品参照セクションでモデルを指定し、それが表す座標系にリンクする必要があります。
座標系とオブジェクトの正しい依存関係をRoboDKで定義しておくことで、移動目標に対して新しい座標系を定義することができます。
パーツをプログラミングするこの方法は、パーツが静的な場合ほど正確ではないかもしれません。
注:精度の高い結果を得るためには、サンプル時間を短くすることをお勧めします。
ビデオCreaform HandyPROBEを使用して動きのある曲線を教える方法https://youtu.be/EcIcLnLeOm8?t=28。
設定
このセクションでは、TwinTrackアクションのデフォルト動作をカスタマイズするためのTwinTrack設定について説明します。
TwinTrack➔ Settingsを選択すると、下図の設定ウィンドウが開きます。
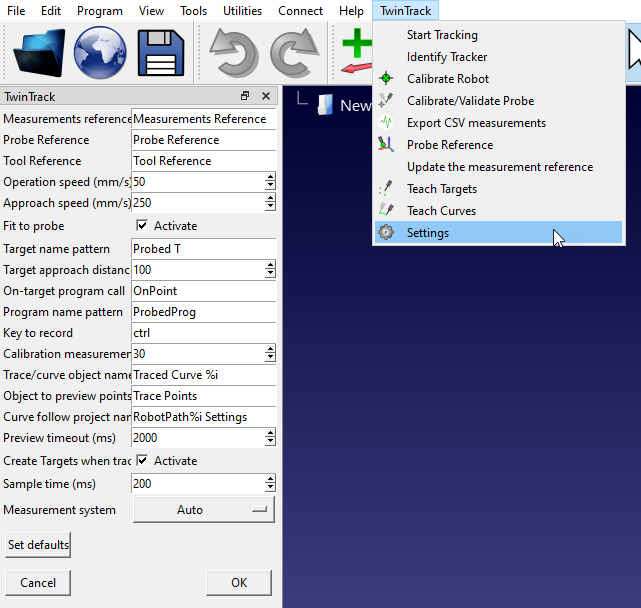
特に、ハンドヘルドデバイスと参照フレームの表示に使用されるデフォルト名を変更できます。また、アプローチスピード・アプローチディスタンスをカスタマイズすることもできます。
ヒント最高の精度を得るには、サンプルタイムを500msまたは1000msに増やすことができます。サンプルタイムを長くする場合は、必ずゆっくりと移動してください。
プログラム・フィルタリング
ロボットが較正されたら、ロボットの較正を確実に利用するために、フィルタリングされたプログラムを生成したり、較正されたロボット・パラメータを考慮したりする必要があります。
キャリブレーション後、ロボットを正確にプログラミングするためには、以下の方法のいずれか1つだけに従う必要があります:
1.精度の高いプログラムを生成するには、RoboDK for オフラインプログラミングを使用してください(生成されたプログラムはすでにフィルタリングされています)。これは精度を最適化するために推奨されるオフラインプログラミングオプションです。
2.ロボットコントローラのパラメータ(リンク長、DH-DHMパラメータ、マスタリングパラメータなど)を較正します。
正確なオフラインプログラミング
ロボットがRoboDKでキャリブレーションされると、ロボットを右クリックしてUse accurate kinematicsを選択することで、正確なキネマティクスを有効にすることができます。
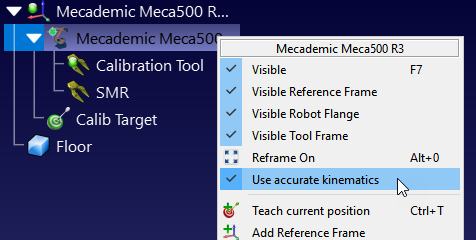
精度が有効であれば緑色の点が、無効であれば赤色の点が表示されます。
これは最適な精度を得るために推奨されるオプションです。RoboDK のロボット精度オプションを有効にすると、RoboDK で生成されるすべてのプログラムは自動的にフィルタリングされます。これは、ロボットの誤差を補正するためにすべてのデカルト座標がわずかに修正されることを意味します。
RoboDKでロボットを加工したり、NCファイルからロボットをプログラムしたり、RoboDKがサポートしているCAD/CAMプラグインを使用したりする場合には、このオプションが最適です。
重要一度プログラムを生成したら、ロボットの設定を変更しないようにしてください。
注意:ツールセンターポイント(TCP)とリファレンスフレームがRoboDKでキャリブレーションされ、定義されていることを確認してください(フィルタリングの前に実際のセットアップの値と一致させてください)。
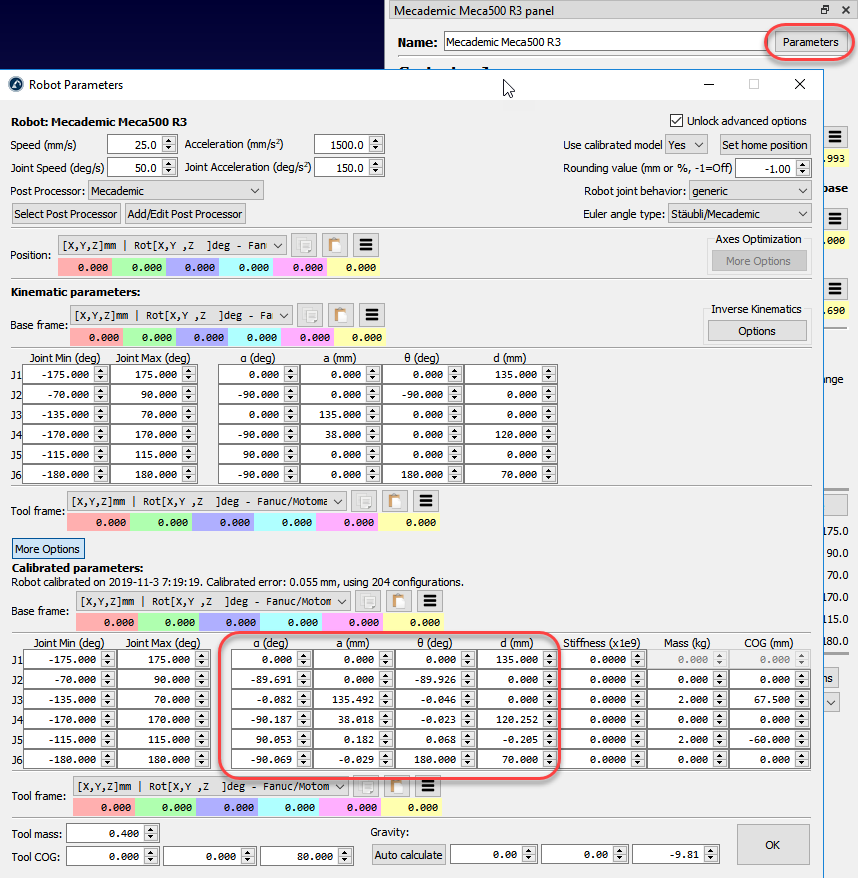
ロボットパラメータの較正
ロボットが較正されると、Parameters メニューから較正されたパラメータにアクセスできます。ロボットコントローラによっては、特定のロボットパラメータを変更することができます。
注意:RoboDKはDenatit-Hartenberg Modified規約を使用しています。選択/キャリブレーションされたパラメータをすべて使用してください。
リファレンスフレームとツールフレーム
RoboDK にはリファレンスフレームやツールフレームを較正するためのユーティリティが用意されています。これらのツールは、それぞれ Utilities➔ Calibrate Reference frame と Utilities➔ Calibrate Tool frameからアクセスできます。
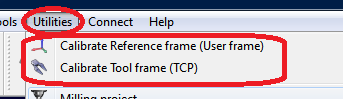
基準フレームや自動較正されていないツール(それぞれユーザーフレームやTCPとも呼ばれます)を較正するためには、3点以上に接するロボットの構成が必要です。RoboDKのメイン画面にロボットの関節をコピーペーストすることで)RoboDK上で実際のロボット構成を確認しやすくなるため、デカルト座標ではなく関節値を使うことをお勧めします。
ツールキャリブレーション
ユーティリティ➔ キャリブレーションツールを選択し、RoboDK を使って TCP のキャリブレーションを行います。必要な数のポイントを、さまざまな向きで使用することができます。TCPの推定値が向上し、TCP誤差の推定値も向上します。
注:詳しくはヒントをご覧ください。
基準フレーム校正
Utilities➔ Calibrate reference を選択して、基準フレームを較正します。さまざまな方法で基準フレームを設定することができます。図の例では、基準フレームは3つの点によって定義されます:点1と2はX軸方向を定義し、点3は正のY軸を定義します。
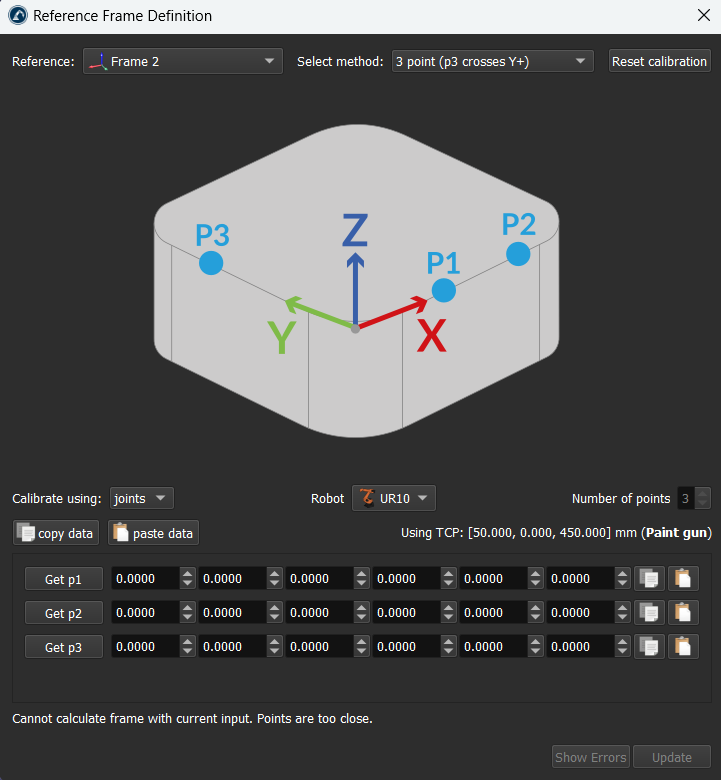
注:基準フレームの較正に関する詳しい情報は、ヒントのセクションをご覧ください。
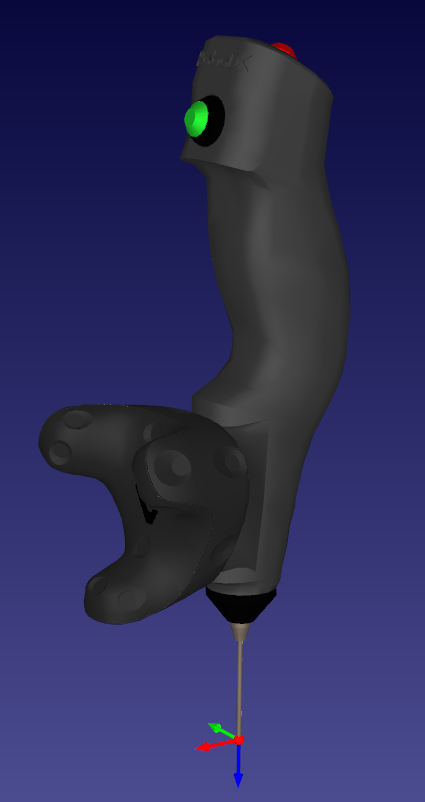
カスタムツイントラックプローブ
このセクションでは、カスタムツイントラックプローブを作成して、デモンストレーションによってロボットにティーチングする方法を紹介します。カスタムプローブを使用すると、人間が教える製造作業をロボットに模倣させることができます。

ハードウェア部品
以下のハードウェア部品のリストにより、RoboDK TwinTrackで使用するカスタムプローブを作成することができます。
1.HTC Vive Tracker 1台(どのバージョンでもサポート、3.0推奨):HTC Vive Tracker 3 Amazonで。推定価格:200ユーロ。

2.Valve Indexベースステーション2台。対応するHTV Vive Trackerと互換性があれば、どのバージョンでも動作します。AmazonのValveベースステーション。価格は2台とも500ユーロ。

3.Valveベースステーション用の三脚2個。Amazonのサンプルパーツ。価格は100ユーロ。

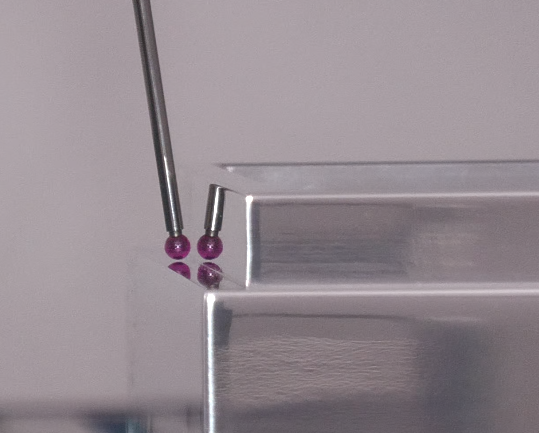
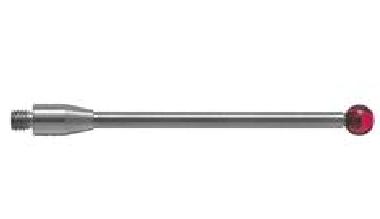
4.長さ 40mm、直径 4mm のレニショーのルビー球。A-5003-0060 など。推定価格:80ユーロ。
5.直径12mmの赤と緑の2つの押しボタンスイッチ。ボタンを押すと電源が入り(回路が閉じる)、離すと電源が切れます(回路が開く):アマゾンの商品例。価格は15ユーロ。

6.スプリング装填ポゴピン 0856-0-15-20-82-14-11-0(3個)。DigiKeyのサンプル製品。見積価格:20ユーロ。

7.スイッチをつなぐ電線(1m以下)。アマゾンでサンプル注文。見積価格:25ユーロ。

8.ボタンヘッドソケットキャップスクリュー1個 ¼-20 x 1":アマゾンのサンプル品。価格の見積もり:10ユーロ。

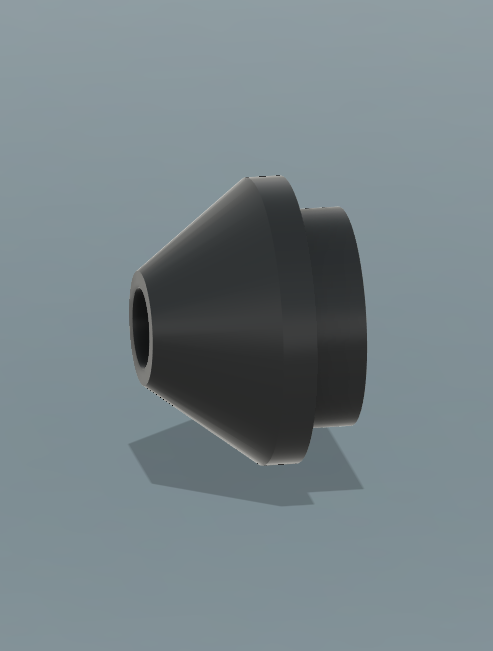
9.本体、プローブホルダー、トッププローブ、トラッカーコネクター、コネクターキャップの5つの3Dプリントパーツ。TwinTrackプローブの製作に必要な3Dプリントパーツはこちらからダウンロードできます。TwinTrackプローブの3Dプリントパーツは、GrabCadとThinginverseでも入手可能です。


プローブアセンブリ
このセクションでは、RoboDK TwinTrack 用プローブの組み立て方を説明します。前のセクションで説明したプローブの組み立てに必要な部品が必要です。また、はんだごてキットも必要です。
以下の手順に従って、プローブを組み立ててください:
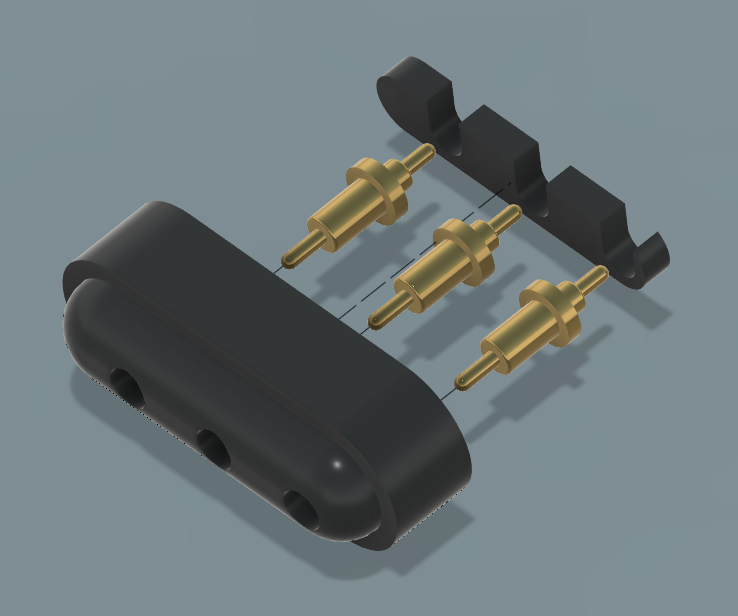
1.コネクタを以下のように組み立て、印刷された部品を接着します。
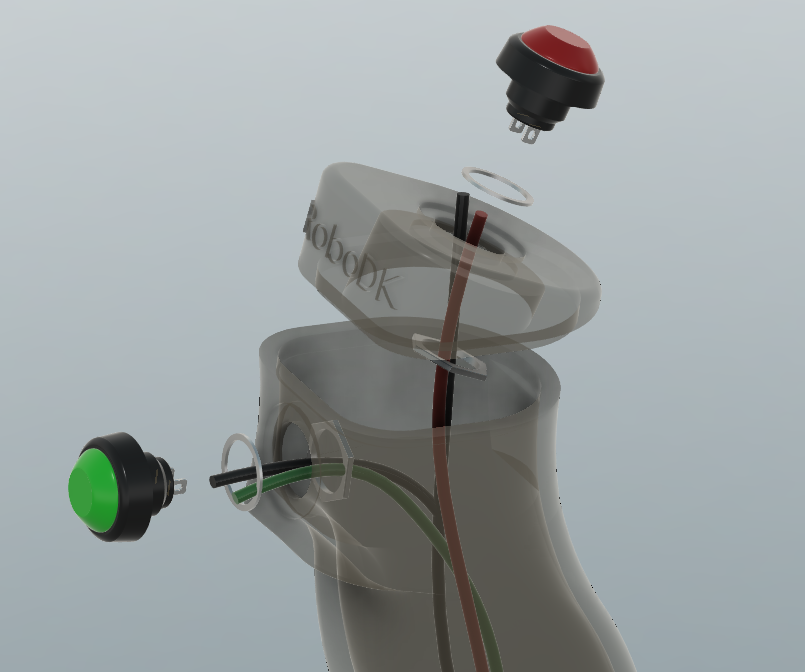
2.以下の画像のように、本体内部と上部のパーツに配線を取り付けます。アース線が両方のスイッチに接続されていることに注意してください。
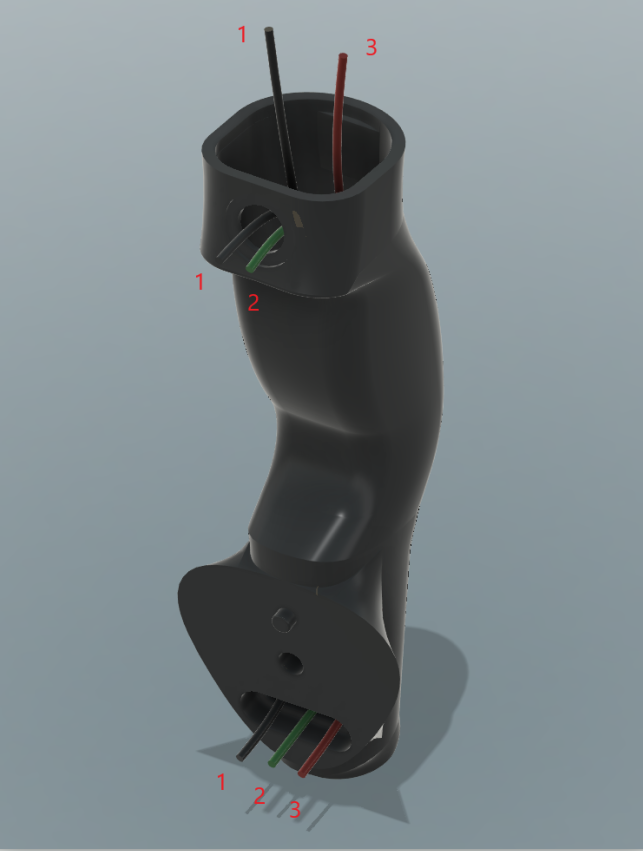
3.ワイヤーをスイッチに接続します。2組の配線はスイッチのナットを通します。また、赤いスイッチのワイヤーは、上部のパーツに通してください。その後、スイッチをはんだ付けします(この順番で)。
重要配線をはんだ付けする前に、ケーブルと上部にナットスイッチを通すことを忘れないでください。
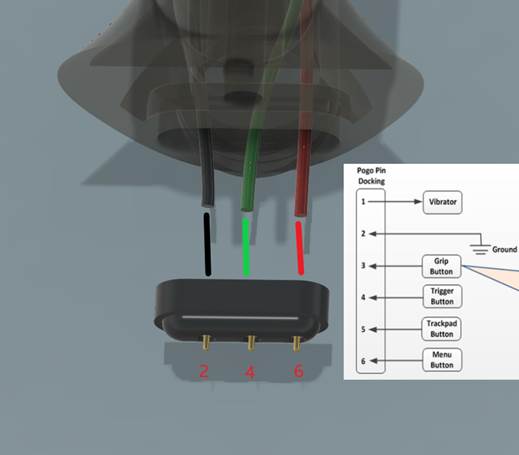
4.コネクターを正しいワイヤーにはんだ付けしてください。ケーブルを正しいコネクターに取り付けてください。
5.プローブの残りの部分を以下の画像のように組み立てます。
