컨트롤러
먼저 RoboDK를실행중인장치에컨트롤러를연결해야합니다. 이애드인은특정로봇동작과설정을표준게임패드입력에매핑합니다. 기본매핑은 Xbox One 컨트롤러를기준으로생성되었습니다.
이동 제어
툴바의'게임 컨트롤러 실행'아이콘을누르거나'연결(Connect)' > '게임 컨트롤러(Game Controller)' > '게임 컨트롤러 실행(Launch Game Controller)'으로이동하십시오. 그러면애드인이시작되며연결된컨트롤러를자동으로감지합니다. '게임컨트롤러실행' 아이콘을다시클릭하면애드인이중지됩니다.
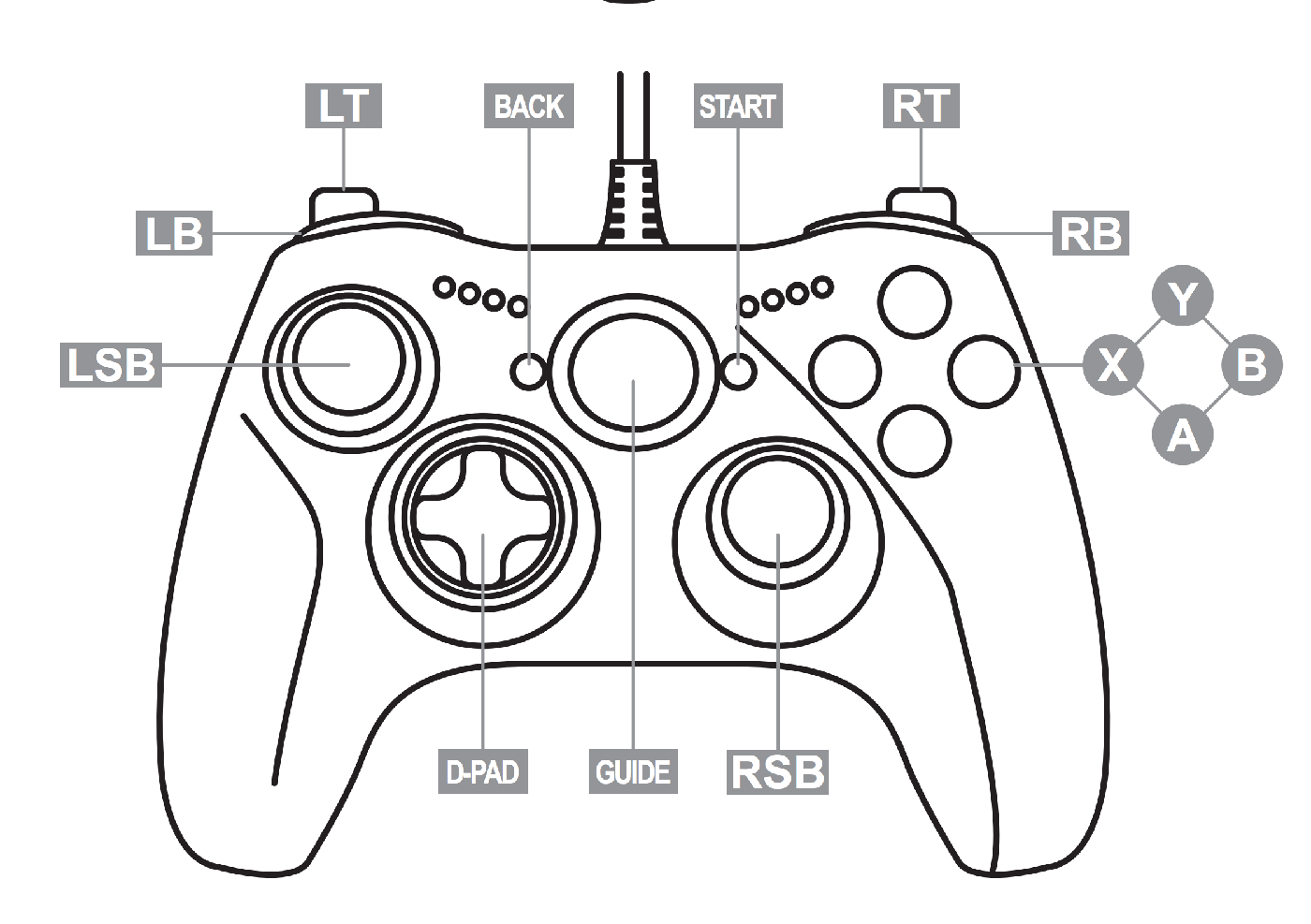
로봇을이동시키려면축을선택한후 D-패드를사용하여움직임을적용해야합니다.
1.X축 선택: 컨트롤러의X 버튼을길게누르세요.
2.Y축 선택: 컨트롤러의 Y 버튼을길게누르세요.
3.Z축 선택: 컨트롤러의 B 버튼을길게누르세요.
4.이동: 축버튼을누른상태에서D-패드를 위나 아래로 움직여로봇을선택한축을따라이동시킵니다.
토글
게임컨트롤러애드인은동작을사용자지정할수있는몇가지토글버튼을제공합니다.
로봇의움직임을조작하는다른옵션은다음과같습니다:
1.평행 이동 대 회전: 왼쪽 스틱 버튼(LSB)을눌러로봇을직선이동(mm)하거나회전(deg)하도록전환합니다. 기본값은평행이동(mm)입니다.
2.MoveJ 대 MoveL: 오른쪽 스틱 버튼(RSB)을눌러관절이동(MoveJ)과선형이동(MoveL) 사이를전환합니다. 기본이동명령은 MoveJ입니다.
3.이동 단계: D-패드의 좌/우 방향 버튼을사용하여이동단계의증분크기를줄이거나늘릴수있습니다.
4.홈 위치: 안전장치를작동시킨상태에서양쪽 범퍼(LB + RB)를 동시에누르면로봇이홈위치로돌아갑니다.