IsaacSim Bridge
이섹션에서는IsaacSim에서기본IsaacSim Bridge 애드인기능을보여줍니다.
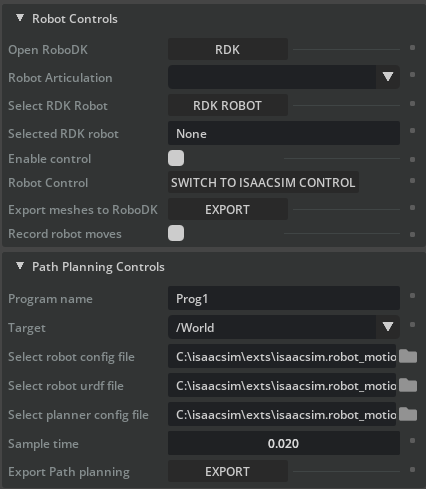
IsaacSim Bridge 확장프로그램창에는다음과같은기능요소가포함되어있습니다:
1.로봇 제어
a.RoboDK 열기: RoboDK가 열려 있지 않으면 열거나, 열려 있으면 현재 실행 중인 RoboDK 인스턴스에 연결합니다. 이 기능은 확장 프로그램이 작동하기 위해 필요합니다.
b.로봇 관절 선택: IsaacSim 내에서 사용할 관절을 선택합니다.
c.RDK 로봇 선택: RoboDK 스테이션 내에서 사용할 로봇을 선택합니다.
d.선택된 RDK 로봇: 선택된 로봇의 이름을 출력합니다.
e.제어 활성화: IsaacSim 장면과 RoboDK 스테이션 간의 로봇 통신을 활성화합니다.
f.로봇 제어: 매칭 대상 로봇으로 사용할 기준 로봇을 선택합니다. 'IsaacSim 제어 전환' 옵션이 표시되면 RoboDK가 마스터 역할을 수행하며, IsaacSim 내 로봇 관절이 선택된 RoboDK 로봇의 포즈를 따릅니다.
g.메쉬를 RoboDK로 내보내기: IsaacSim 장면의 메쉬 객체를 3D 메쉬 파일로 변환하여 RoboDK 스테이션에 로드합니다. 변환된 객체의 원점은 스테이션의 베이스에 위치하지만, 현재 위치가 IsaacSim 장면에서의 위치와 일치하도록 오프셋됩니다. IsaacSim의 각 메쉬 객체는 RoboDK 스테이션에서 독립된 객체가 되어 이동이 가능합니다.
h.로봇 동작 기록: IsaacSim 로봇이 수행한 모든 동작을 기록하여 RoboDK 내 프로그램에 추가합니다. IsaacSim 내 프로그램을 RoboDK로 내보내려는 경우 유용합니다.
2.경로계획제어
a.프로그램이름: RDK로내보낼때사용할프로그램이름.
b.목표: RRT 경로계획기의대상으로사용할 XForms의드롭다운메뉴.
c.로봇구성파일선택: 경로계획에사용할로봇구성파일을선택합니다. 파일형식은 yaml이어야합니다.
d.로봇 URDF 파일선택: 경로계획에사용할로봇정의파일을선택합니다. 파일형식은 URDF여야합니다.
e.경로계획용플래너구성파일선택: 경로계획에사용할플래너구성파일을선택합니다. 파일형식은 yaml이어야합니다.
f.샘플시간: 경로생성시사용할샘플시간을선택합니다. 샘플시간이짧을수록프로그램내 MoveJ 명령어가더많아지고각명령어간간격이더짧아집니다.
g.경로계획내보내기: RRT를사용하여현재로봇포즈와선택한타겟위치사이의경로를계산하고, 경로를완성하는명령어목록이포함된로봇프로그램을생성합니다.