IsaacSim Bridge 애드인
RoboDK용IsaacSim Bridge 애드인은사용자가 IsaacSim 장면을 RoboDK와연결하여실제로봇에대한연결을단순화하거나필요에따라로봇프로그램을생성할수있도록합니다. IsaacSim 확장기능은또한 RRT 모션플래너를구현하여IsaacSim에서충돌없는경로를 RoboDK 프로그램으로내보내는것을용이하게합니다.
RoboDK는 Isaac Sim의산업용로봇에포스트프로세스기능을추가하여 80개로봇브랜드의 1200개산업용로봇에대해생산준비가완료된로봇프로그램을생성합니다.
#IsaacSimBridgeInstall
애드인라이브러리에서 Isaac Sim Bridge 애드인을설치해야합니다. IsaacSim Bridge 애드인은 RoboDK 소프트웨어에서기본적으로활성화되어있지않습니다.
IsaacSim에확장프로그램을설치하려면먼저 RoboDK Python API 모듈을설치해야합니다. 이를위해다음단계를따르십시오:
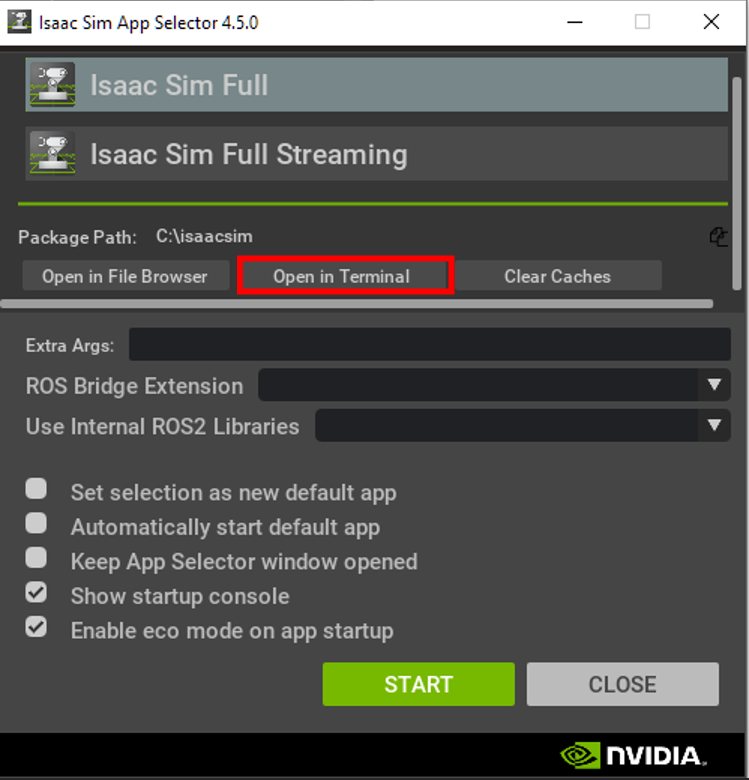
1.IsaacSim 선택기를엽니다.
2.터미널에서열기를클릭합니다.
다음명령어를실행하세요: pip install RoboDK
RoboDK 패키지설치후, 다음단계를따라 IsaacSim에확장프로그램을설치할수있습니다.
1.RoboDK에서애드인을설치합니다.
2.파일관리자에서애드인위치를엽니다.
3.RoboDK.Bridge 폴더를복사하세요. 이폴더에는 IsaacSim용확장기능이포함되어있습니다.
4.IsaacSim 설치폴더내extsUser 폴더에붙여넣으세요.
5.IsaacSim을실행하고확장프로그램관리자를엽니다.
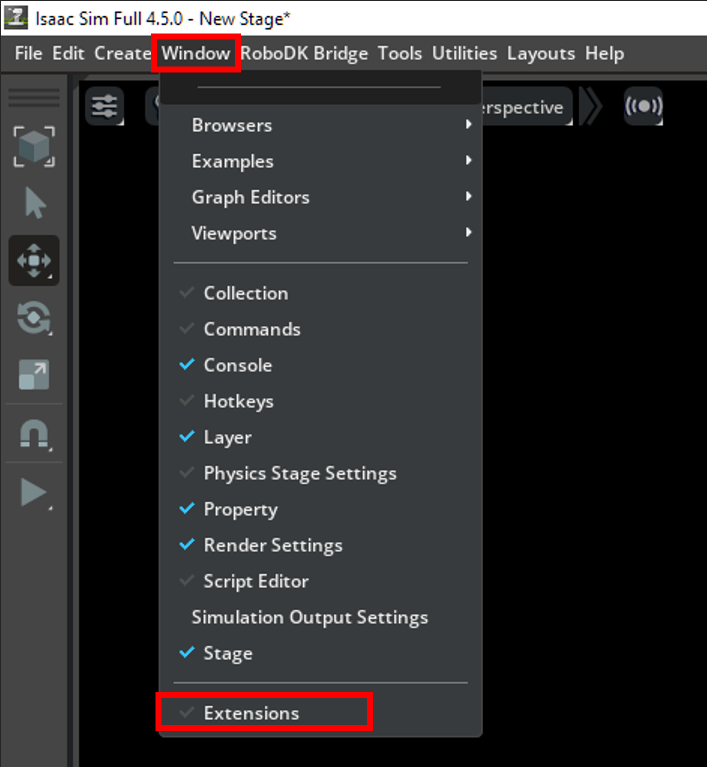
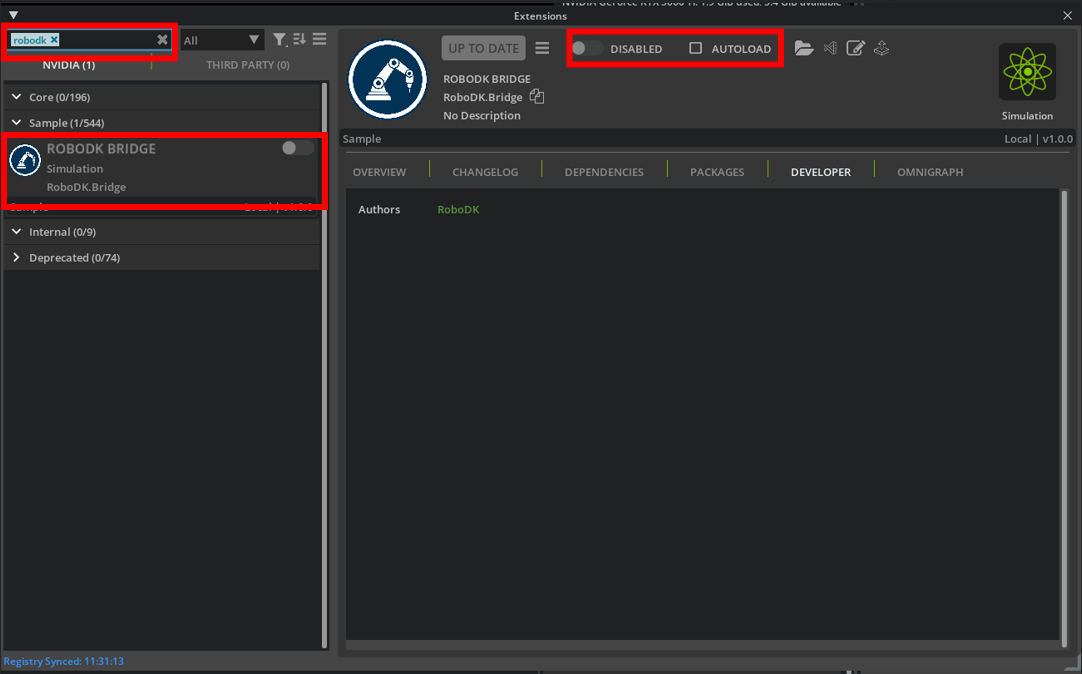
6.검색창에서 RoboDK를검색하세요.
7.확장기능을활성화하고, 선택적으로자동로드를활성화하세요.
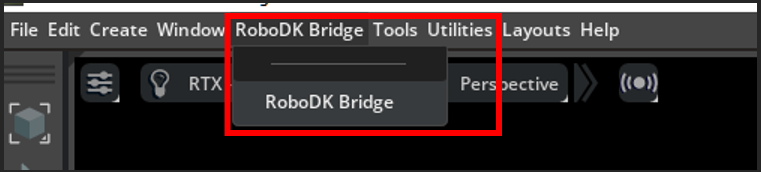
8.이제 IsaacSim의도구모음에 RoboDK Bridge가나타나며열수있습니다.
IsaacSim Bridge 기능
이섹션에서는IsaacSim에서기본IsaacSim Bridge 애드인기능을보여줍니다.
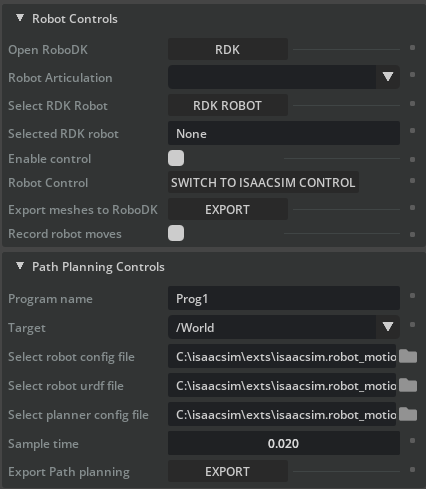
IsaacSim Bridge 확장프로그램창에는다음과같은기능요소가포함되어있습니다:
1.로봇 제어
a.RoboDK 열기: RoboDK가 열려 있지 않으면 열거나, 열려 있으면 현재 실행 중인 RoboDK 인스턴스에 연결합니다. 이 기능은 확장 프로그램이 작동하기 위해 필요합니다.
b.로봇 관절 선택: IsaacSim 내에서 사용할 관절을 선택합니다.
c.RDK 로봇 선택: RoboDK 스테이션 내에서 사용할 로봇을 선택합니다.
d.선택된 RDK 로봇: 선택된 로봇의 이름을 출력합니다.
e.제어 활성화: IsaacSim 장면과 RoboDK 스테이션 간의 로봇 통신을 활성화합니다.
f.로봇 제어: 매칭 대상 로봇으로 사용할 기준 로봇을 선택합니다. 'IsaacSim 제어 전환' 옵션이 표시되면 RoboDK가 마스터 역할을 수행하며, IsaacSim 내 로봇 관절이 선택된 RoboDK 로봇의 포즈를 따릅니다.
g.메쉬를 RoboDK로 내보내기: IsaacSim 장면의 메쉬 객체를 3D 메쉬 파일로 변환하여 RoboDK 스테이션에 로드합니다. 변환된 객체의 원점은 스테이션의 베이스에 위치하지만, 현재 위치가 IsaacSim 장면에서의 위치와 일치하도록 오프셋됩니다. IsaacSim의 각 메쉬 객체는 RoboDK 스테이션에서 독립된 객체가 되어 이동이 가능합니다.
h.로봇 동작 기록: IsaacSim 로봇이 수행한 모든 동작을 기록하여 RoboDK 내 프로그램에 추가합니다. IsaacSim 내 프로그램을 RoboDK로 내보내려는 경우 유용합니다.
2.경로계획제어
a.프로그램이름: RDK로내보낼때사용할프로그램이름.
b.목표: RRT 경로계획기의대상으로사용할 XForms의드롭다운메뉴.
c.로봇구성파일선택: 경로계획에사용할로봇구성파일을선택합니다. 파일형식은 yaml이어야합니다.
d.로봇 URDF 파일선택: 경로계획에사용할로봇정의파일을선택합니다. 파일형식은 URDF여야합니다.
e.경로계획용플래너구성파일선택: 경로계획에사용할플래너구성파일을선택합니다. 파일형식은 yaml이어야합니다.
f.샘플시간: 경로생성시사용할샘플시간을선택합니다. 샘플시간이짧을수록프로그램내 MoveJ 명령어가더많아지고각명령어간간격이더짧아집니다.
g.경로계획내보내기: RRT를사용하여현재로봇포즈와선택한타겟위치사이의경로를계산하고, 경로를완성하는명령어목록이포함된로봇프로그램을생성합니다.