H-bot
X-빔, Y-빔, 캐리지및 Z-빔에대한파라미터를설정하여파라메트릭H-봇을만들수있습니다.
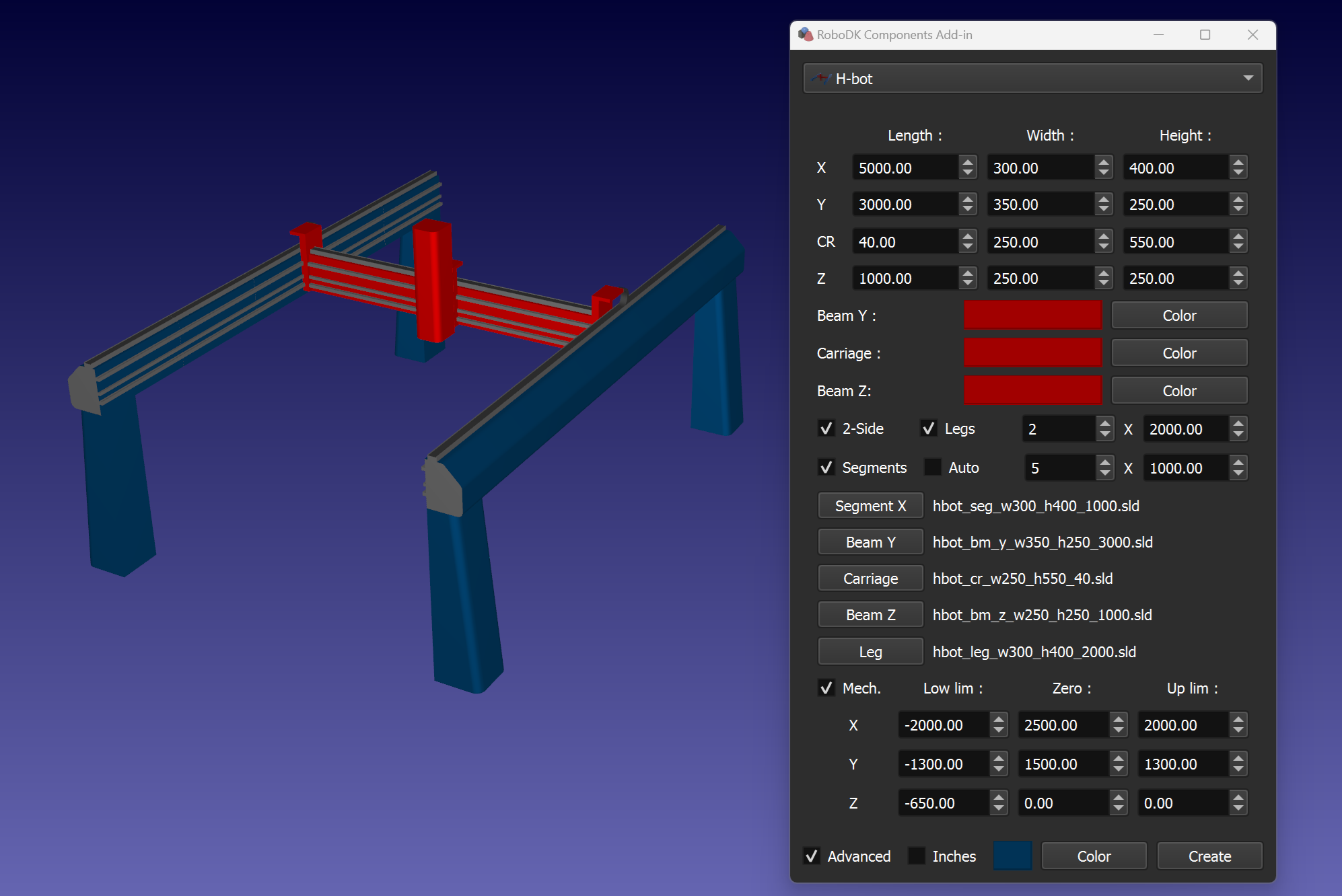
팁: 세그먼트, 빔 Y, 빔 Z 및캐리지모델을사용하여분할된X-빔이있는H봇을만들수있습니다. 세그먼트 X, 빔 Y, 캐리지 및빔 Z 버튼을사용하여적절한모델파일을설정해야합니다. 올바른치수값과올바른세그먼트수를사용해야합니다. 세그먼트 체크박스를사용하여적절한H봇모델을빌드합니다.
팁: 메커니즘 확인란을사용하여H봇메커니즘을만듭니다. 해당파라미터를사용하여축의동작제한과영점위치를추가로설정할수있습니다.
참고: 세그먼트 옵션을사용하는경우세그먼트, 빔및캐리지모델의변위를확인하세요. 모델 폴더에는몇가지예제가있습니다. 기본적으로모델예제가있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\입니다.
팁: 자동 확인란을사용하여모델바운딩박스측정을기반으로매개변수를설정합니다. 모델의작은세부사항이측정결과에영향을미칠수있습니다. 측정후자동을 선택취소하고파라미터를수동으로설정할수있습니다.
팁: 다리 확인란을사용하여지정된높이의기본기둥을필요한수만큼추가합니다.
팁: 미러링된 X-빔을추가하려면2면 확인란을사용하세요.