턴테이블
플랜지반경, 측면및수평오프셋, 높이, 베이스, 빔및플랜지의색상등의파라미터를지정하여3축포지셔너를생성할수있습니다.
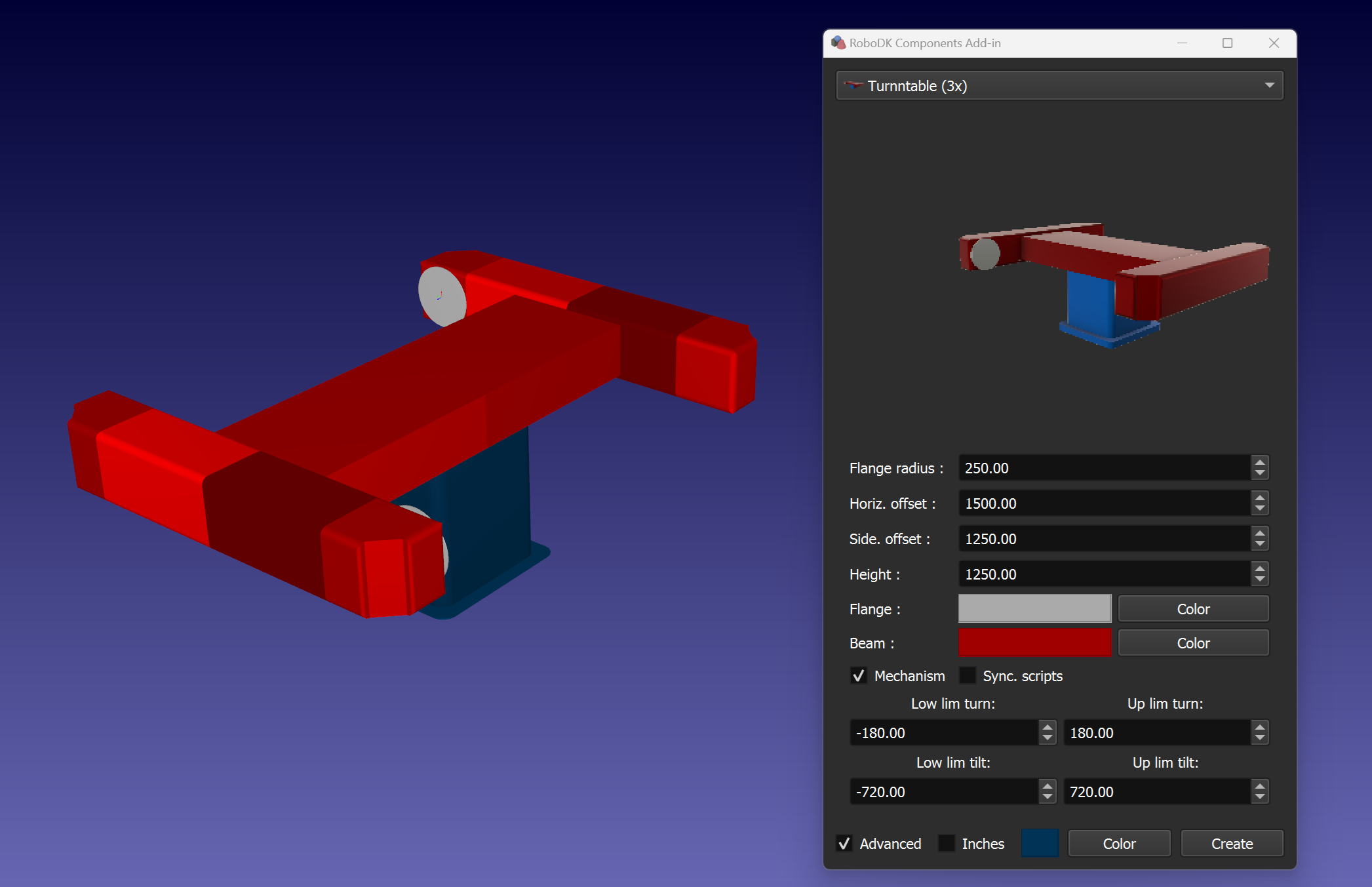
팁: 메커니즘 확인란을사용하여3축포지셔너메커니즘을만들수있습니다. 해당파라미터로모션제한을추가로설정할수있습니다.
팁: 동기화스크립트 확인란을사용하여해당스크립트를실행하여로봇을필요한가로축과동기화할추가 Python 스크립트를만들수있습니다.
참고: 기본적으로동기화스크립트예제가들어있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\입니다.