RoboDK용 Components Add-in은 RoboDK 소프트웨어에서시각적구성요소(3D 오브젝트및메커니즘)를만드는데필요한도구를추가합니다.
RoboDK Components Add-in을사용하면생성한컴포넌트의크기와구성매개변수를정의할수도있습니다. 미리보기를통해결과가올바른지확인할수있습니다
만들려는컴포넌트의색상과투명도를원하는대로설정할수있습니다.
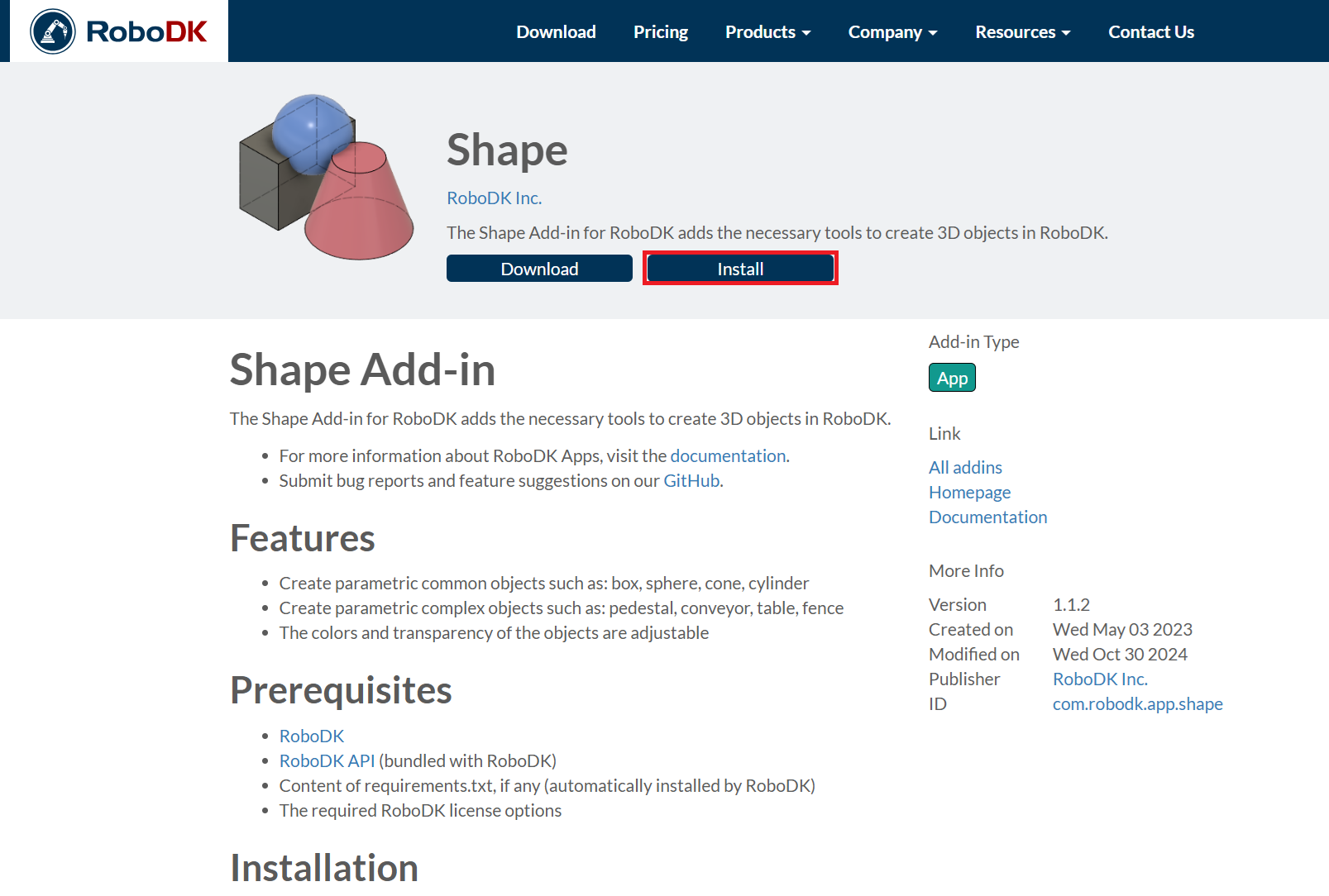
라이브러리의 Add-in 섹션에서 RoboDK Components 애드인(https://robodk.com/addin/com.robodk.app.shape)을찾을수있습니다.
참고: 이추가기능의이름이Shape Add-in에서Components add-in으로변경되었습니다.
RoboDK 온라인 라이브러리에서 Components Add-in을 설치해야합니다. 구성요소추가기능은 RoboDK 소프트웨어에서기본적으로활성화되어있지않습니다.
이섹션에서는기본적인Components Add-in 기능을보여줍니다.
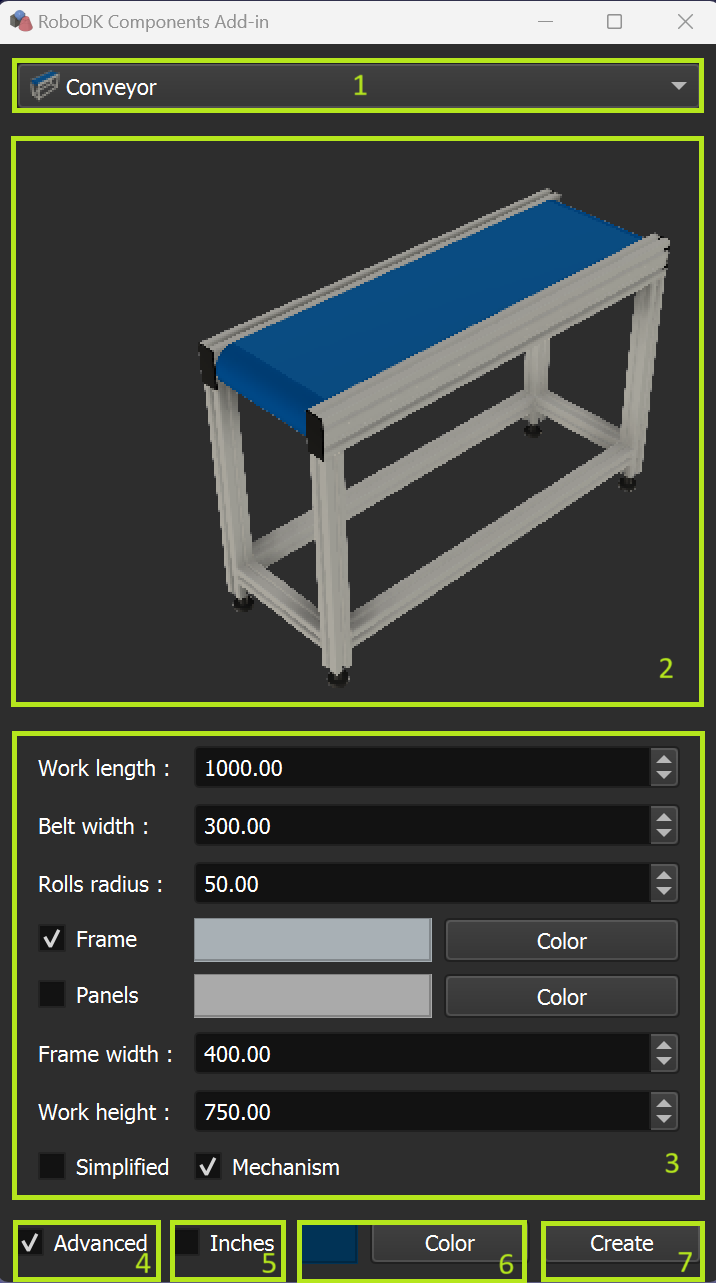
Components Add-in 창에는다음과같은기능요소가포함되어있습니다:
1.컴포넌트 선택 목록 영역
2.컴포넌트스케치
3.선택한 컴포넌트 파라미터 영역
4.고급 옵션 표시 여부 확인란
5.인치(기본적으로 밀리미터 사용)를 사용하려면 확인란을 선택합니다.
6.색상및투명도선택
7.컴포넌트생성
컨베이어치수를지정하여컨베이어를생성할수있습니다.
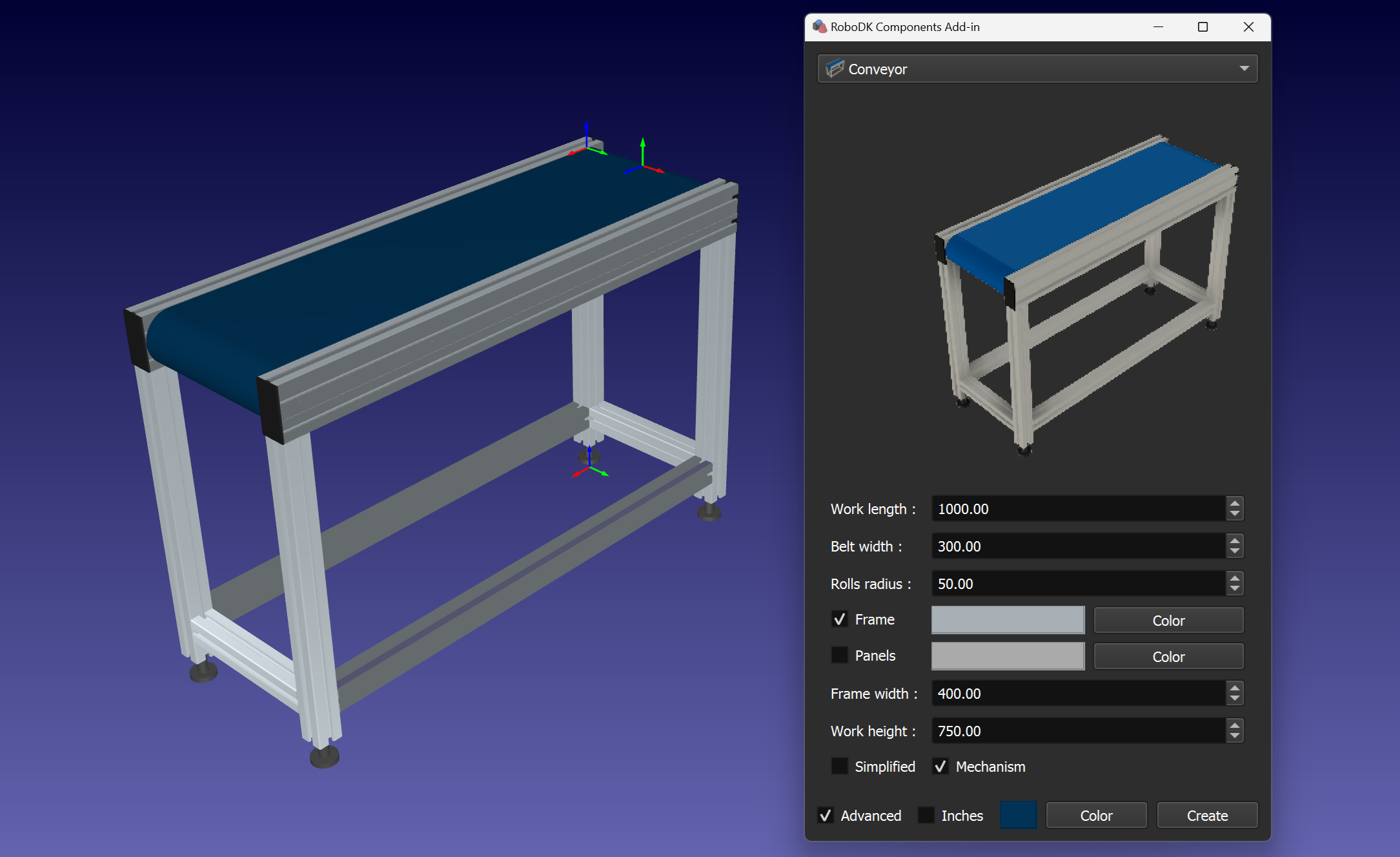
팁: 적절한크기값과함께프레임 확인란과색상 대화상자를사용하여컨베이어프레임을추가합니다.
팁: 패널 확인란과해당색상 대화상자를사용하여지정된색상과투명도를가진프레임패널을추가합니다.
팁: 단순화 확인란을사용하여단순화된프레임과사실적인프레임간에전환할수있습니다.
팁: 컨베이어메커니즘을만들려면메커니즘 확인란을사용하세요.
치수를지정하여받침대를만들수있습니다(R1, R2, R3, H1, H2, H3).
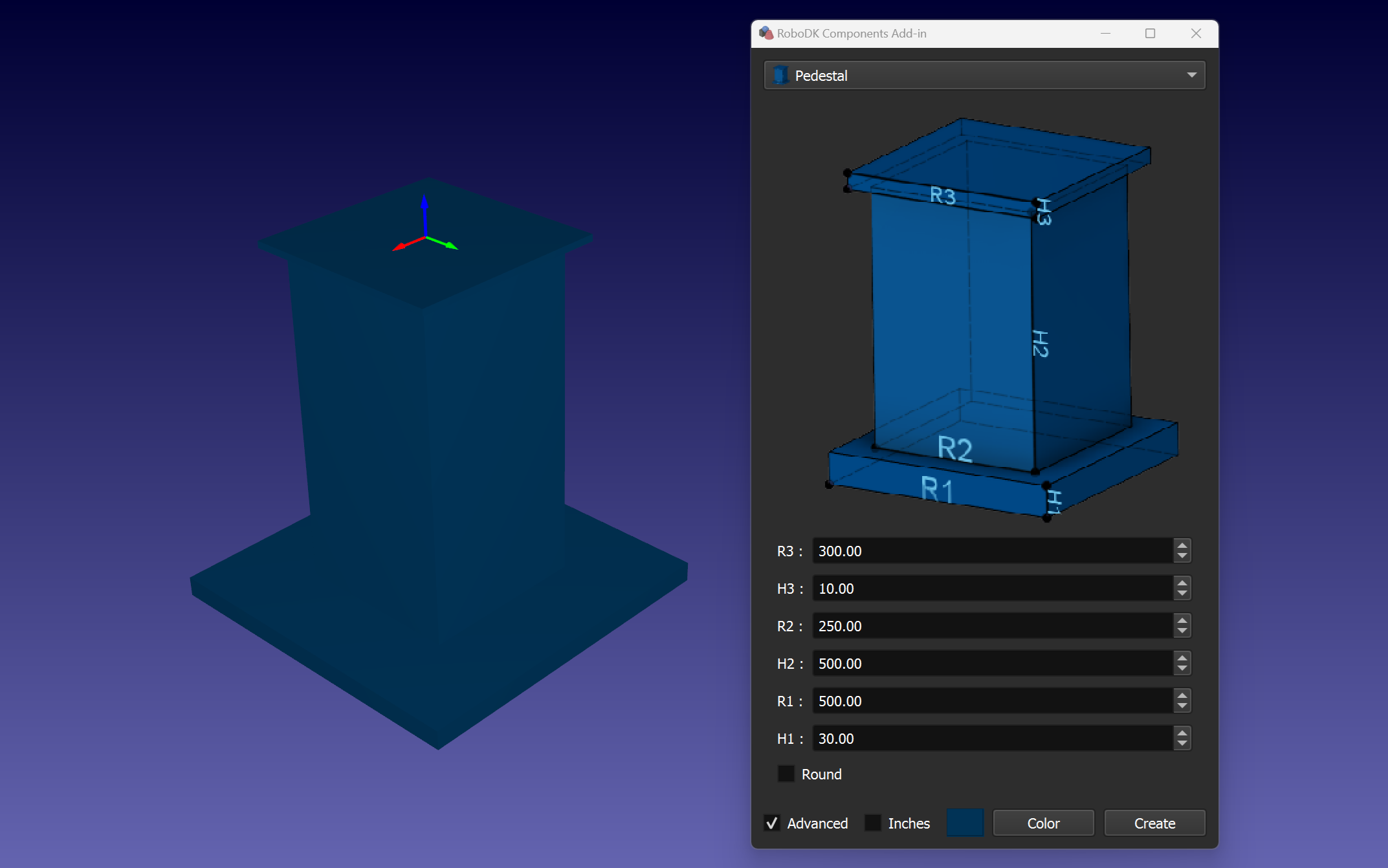
팁: 원통형지하실을만들려면원형확인란을사용하세요.
팁: 추가로생성한받침대 N 평면 프레임은 지하실의상부평면중앙에필요한물건을배치하는데유용할수있습니다.
차원(X, Y, R, H1, H2)을지정하여테이블을만들수있습니다.
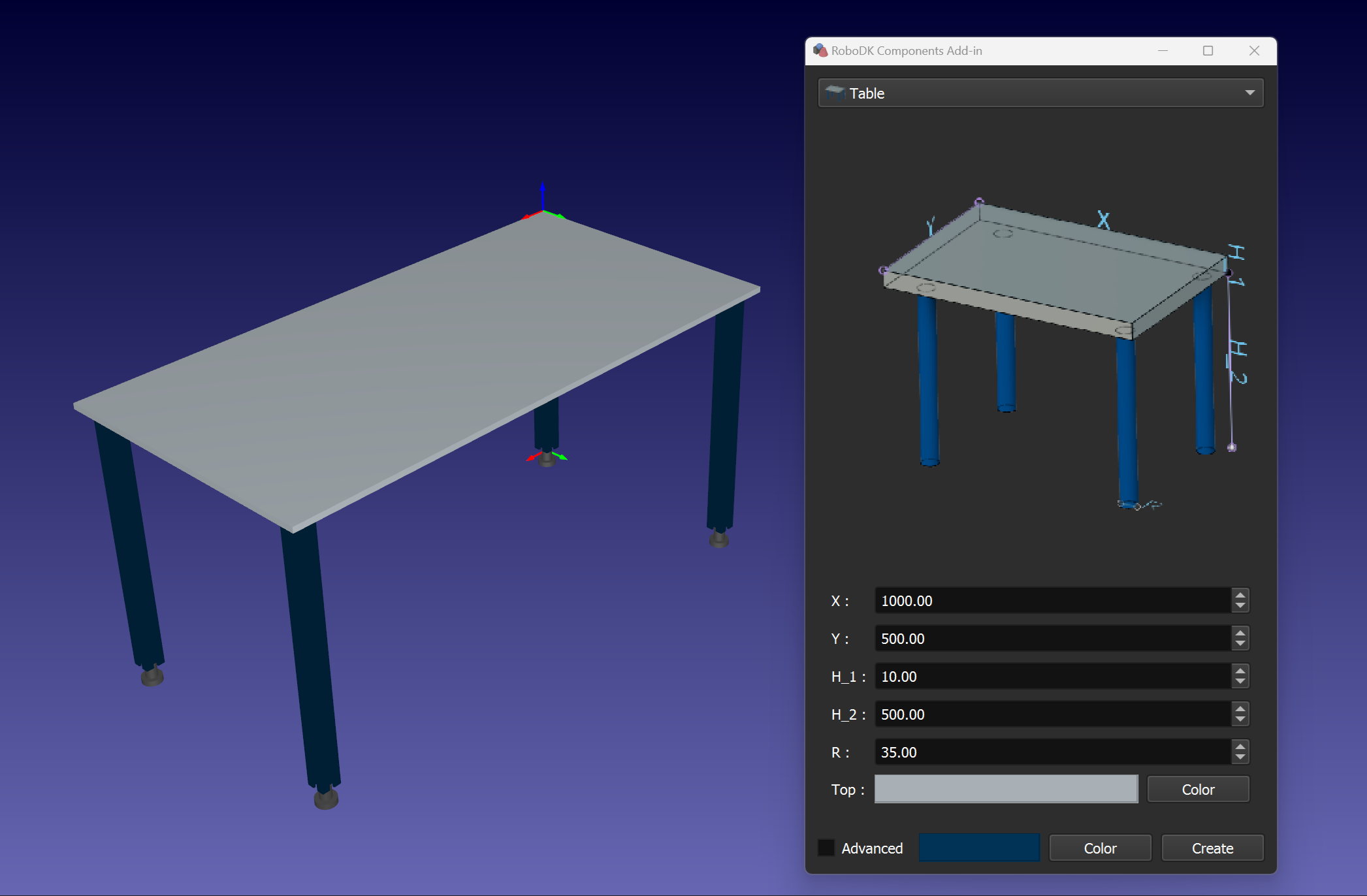
팁: 색상 대화상자를사용하여표상단표면의색상과투명도를설정합니다.
팁: 추가로생성한테이블 N 평면 프레임이라는 프레임을사용하면테이블의윗면에필요한물건을배치하는데유용할수있습니다.
팁: 단순화 확인란을사용하여단순화된테이블다리와실제테이블다리사이를전환할수있습니다.
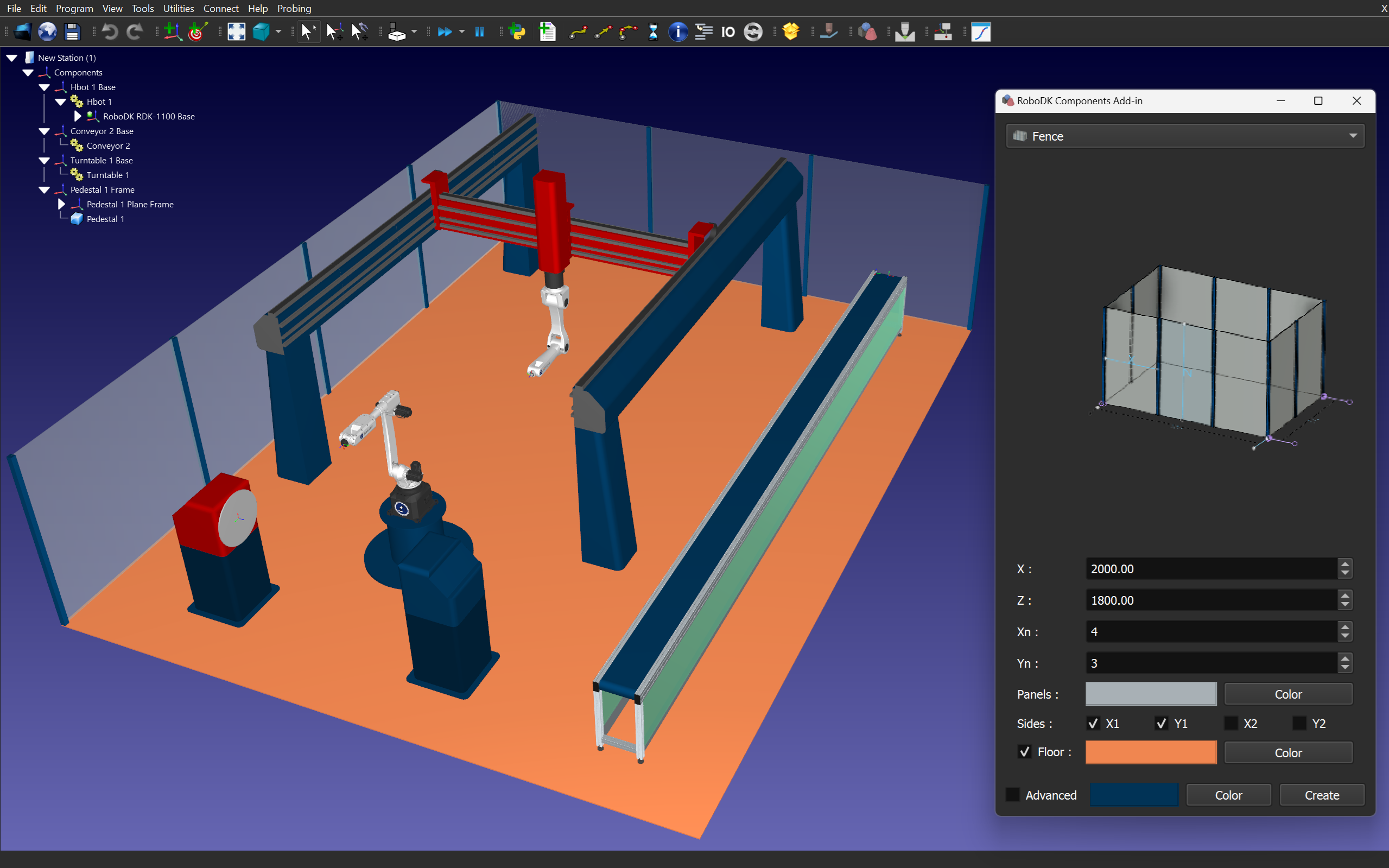
패널치수(X, Z)와섹션번호(Xn, Yn)를지정하여울타리를만들수있습니다.
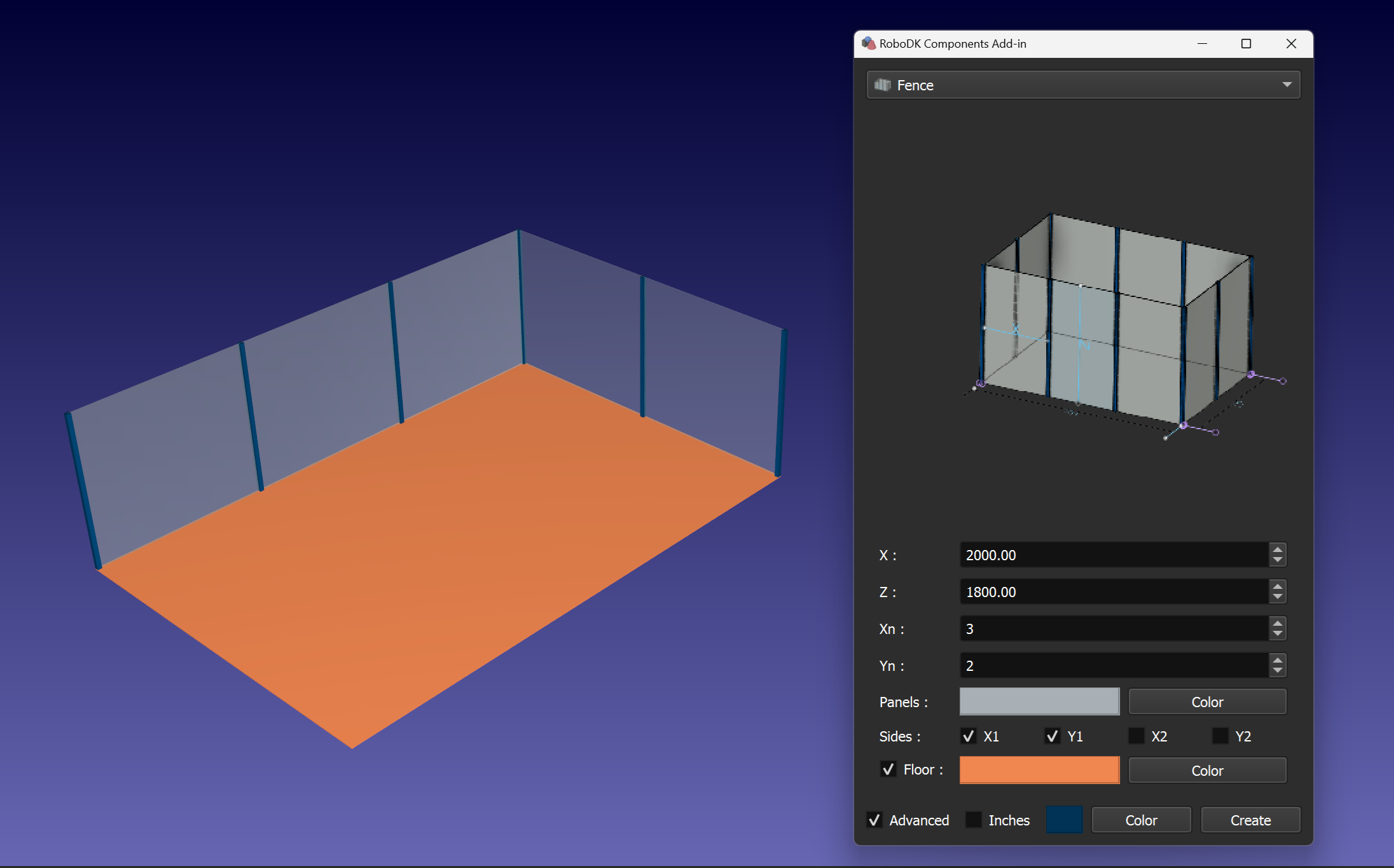
팁: 색상 대화상자를사용하여울타리패널의색상과투명도를설정할수있습니다.
팁: 바닥 확인란과해당색상 대화상자를사용하여지정된색상과투명도로바닥을추가할수 있습니다.
팁: X1, X2, Y1 및Y2 확인란을조작하여울타리구성을변경할수있습니다.
레일베이스및캐리지의길이, 너비, 높이, 색상등의매개변수를지정하여레일을생성할수있습니다.
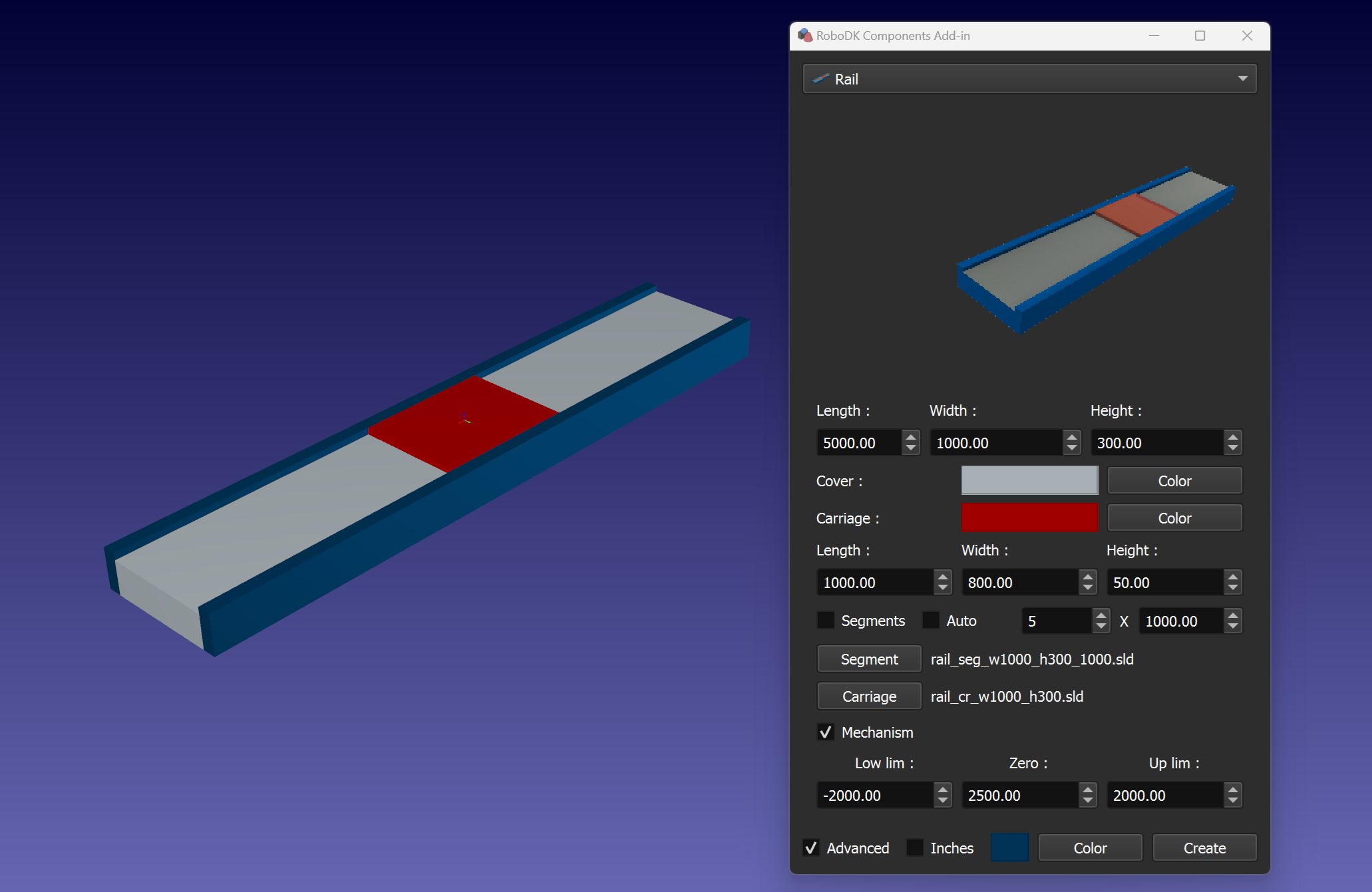
팁: 기본세그먼트와캐리지의모델을사용하여세그먼트레일을생성할수있습니다. 세그먼트 및캐리지 버튼을사용하여해당모델파일을설정해야합니다. 올바른치수값과올바른세그먼트수를사용해야합니다. 세그먼트 확인란을사용하여해당레일모델을빌드합니다.
팁: 메커니즘 확인란을사용하여레일메커니즘을만듭니다. 해당파라미터를사용하여캐리지의동작제한과영점위치를추가로설정할수있습니다.
참고: 세그먼트 옵션을사용하는경우세그먼트및캐리지모델의변위를확인하세요. 모델 폴더에는몇가지예제가있습니다. 기본적으로모델예제가있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\models\rail\입니다.
팁: 자동 확인란을사용하여모델바운딩박스측정을기반으로매개변수를설정합니다. 모델의작은세부사항이측정결과에영향을미칠수있습니다. 측정후자동을 선택취소하고파라미터를수동으로설정할수있습니다.
X-빔, 캐리지및 Z-빔에대한파라미터를설정하여파라메트릭 T봇을만들수있습니다.
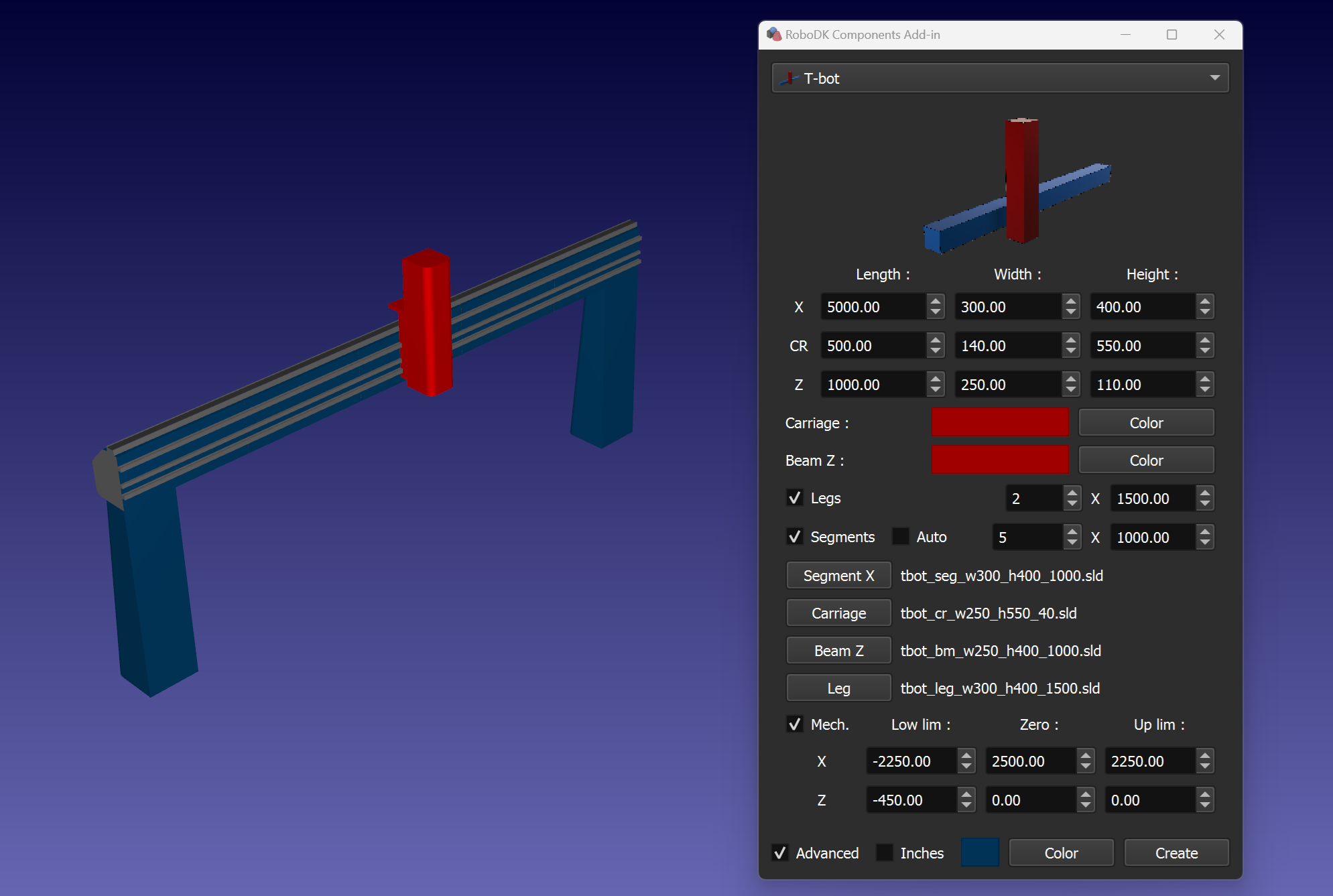
팁: 세그먼트, 빔 Z 및캐리지모델을사용하여분할된X-빔이있는 T봇을만들수있습니다. 세그먼트 X, 캐리지 및빔 Z 버튼을사용하여적절한모델파일을설정해야합니다. 올바른치수값과올바른세그먼트수를사용해야합니다. 세그먼트 체크박스를사용하여적절한티봇모델을빌드합니다.
팁: 메커니즘 확인란을사용하여T봇메커니즘을만듭니다. 해당매개변수를사용하여동작제한과축의영점위치를추가로설정할수있습니다.
참고: 세그먼트 옵션을사용하는경우세그먼트, 빔및캐리지모델의변위를확인하세요. 모델 폴더에는몇가지예제가있습니다. 기본적으로모델예제가있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\models\tbot\입니다.
팁: 자동 확인란을사용하여모델바운딩박스측정을기반으로매개변수를설정합니다. 모델의작은세부사항이측정결과에영향을미칠수있습니다. 측정후자동을 선택취소하고파라미터를수동으로설정할수있습니다.
팁: 다리 확인란을사용하여지정된높이의기본기둥을필요한수만큼추가합니다.
X-빔, Y-빔, 캐리지및 Z-빔에대한파라미터를설정하여파라메트릭H-봇을만들수있습니다.
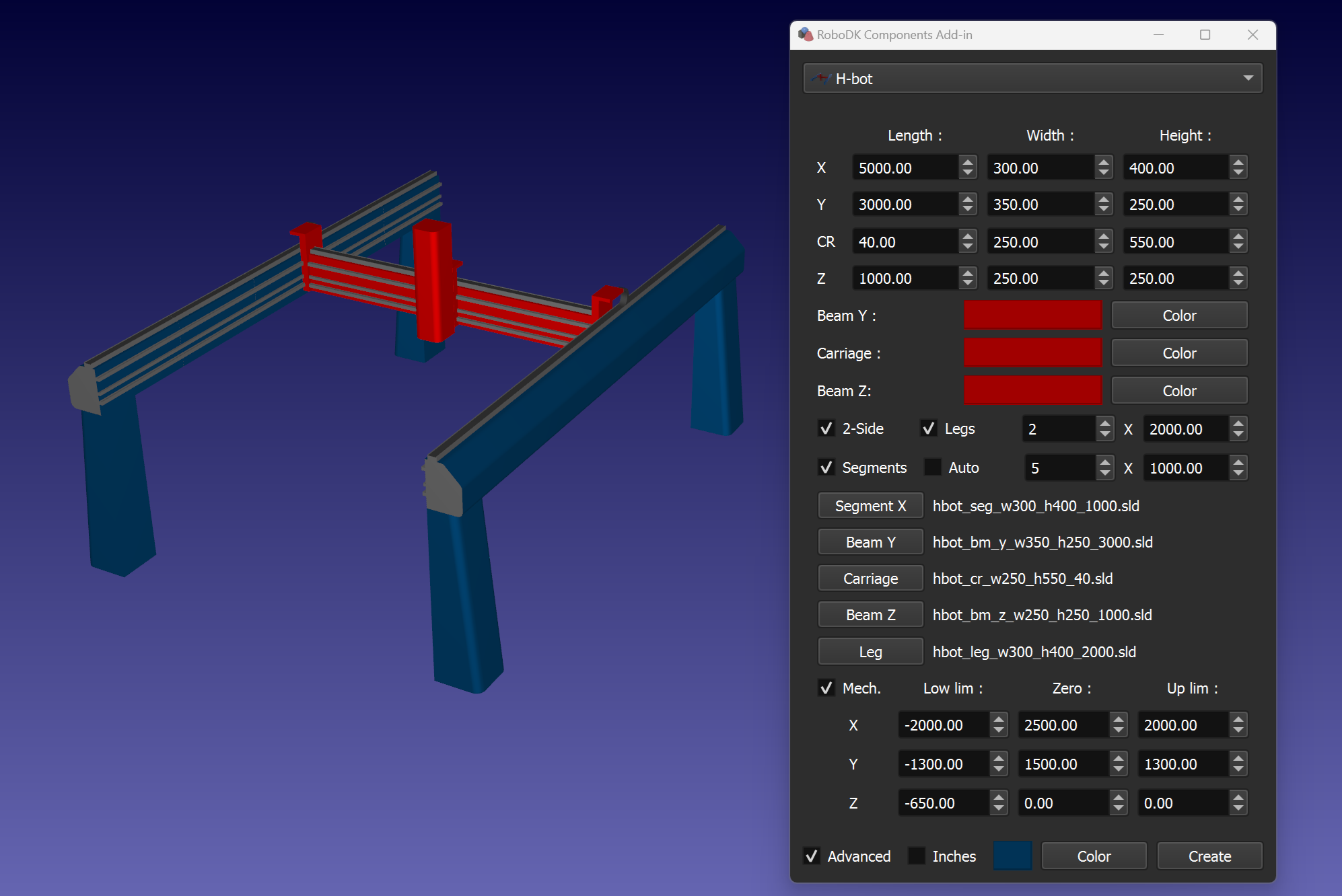
팁: 세그먼트, 빔 Y, 빔 Z 및캐리지모델을사용하여분할된X-빔이있는H봇을만들수있습니다. 세그먼트 X, 빔 Y, 캐리지 및빔 Z 버튼을사용하여적절한모델파일을설정해야합니다. 올바른치수값과올바른세그먼트수를사용해야합니다. 세그먼트 체크박스를사용하여적절한H봇모델을빌드합니다.
팁: 메커니즘 확인란을사용하여H봇메커니즘을만듭니다. 해당파라미터를사용하여축의동작제한과영점위치를추가로설정할수있습니다.
참고: 세그먼트 옵션을사용하는경우세그먼트, 빔및캐리지모델의변위를확인하세요. 모델 폴더에는몇가지예제가있습니다. 기본적으로모델예제가있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\models\hbot\입니다.
팁: 자동 확인란을사용하여모델바운딩박스측정을기반으로매개변수를설정합니다. 모델의작은세부사항이측정결과에영향을미칠수있습니다. 측정후자동을 선택취소하고파라미터를수동으로설정할수있습니다.
팁: 다리 확인란을사용하여지정된높이의기본기둥을필요한수만큼추가합니다.
팁: 미러링된 X-빔을추가하려면2면 확인란을사용하세요.
플랜지반경, 베이스높이, 베이스및플랜지의색상등의매개변수를지정하여턴테이블을만들수있습니다.
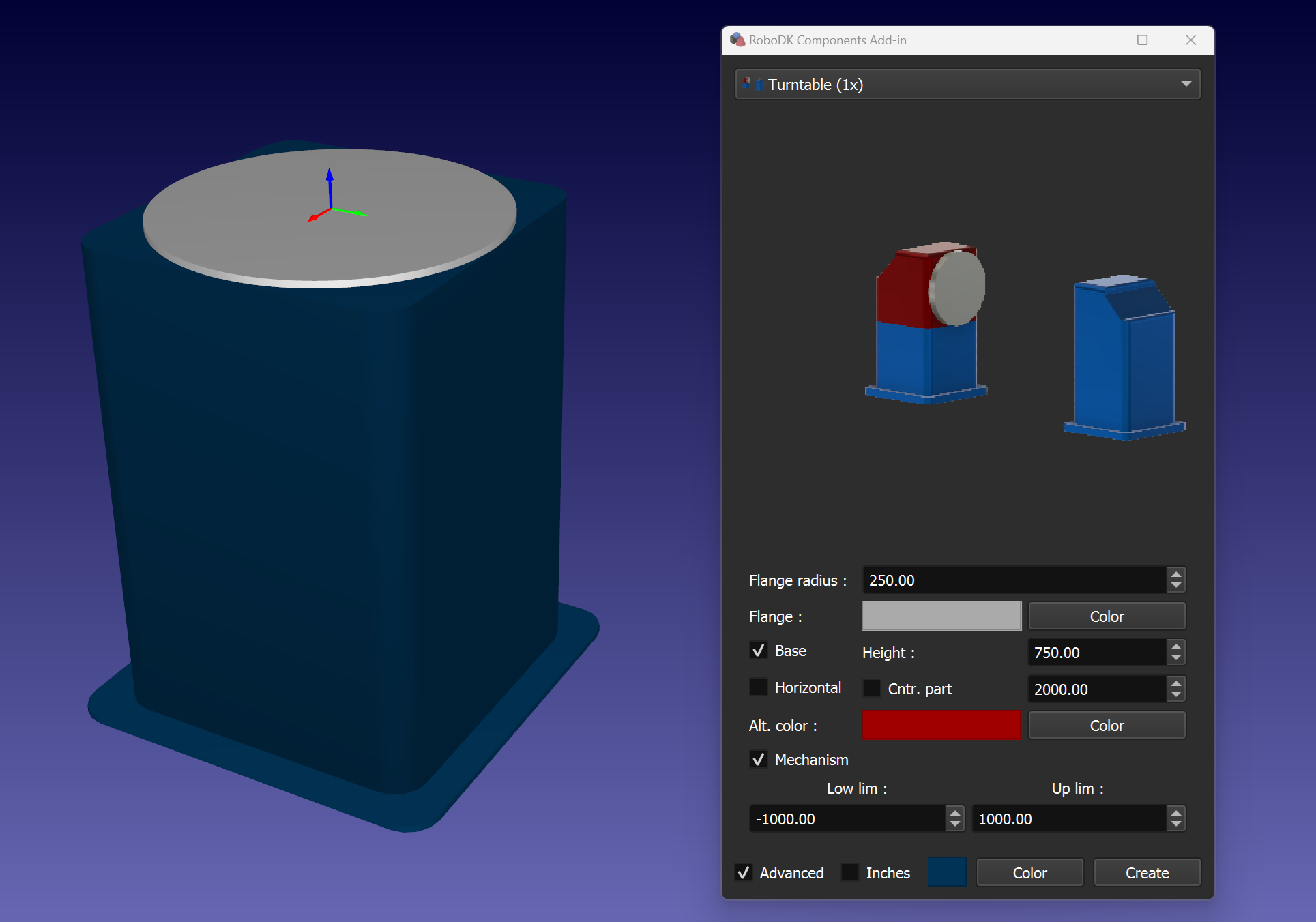
팁: 기본 확인란과높이매개변수를사용하여포지셔너본문을만듭니다.
팁: 수평 확인란을토글하여수평또는수직포지셔너를만들수있습니다. 또한카운터파트가필요한경우카운터파트확인란과해당오프셋파라미터를사용할수있습니다.
팁: 턴테이블메커니즘을만들려면메커니즘 확인란을사용합니다. 해당매개변수를사용하여모션제한을추가로설정할수있습니다.
플랜지반경, 수직및수평오프셋, 베이스높이, 베이스, 빔및플랜지의색상등의매개변수를지정하여틸트턴테이블을만들수있습니다.
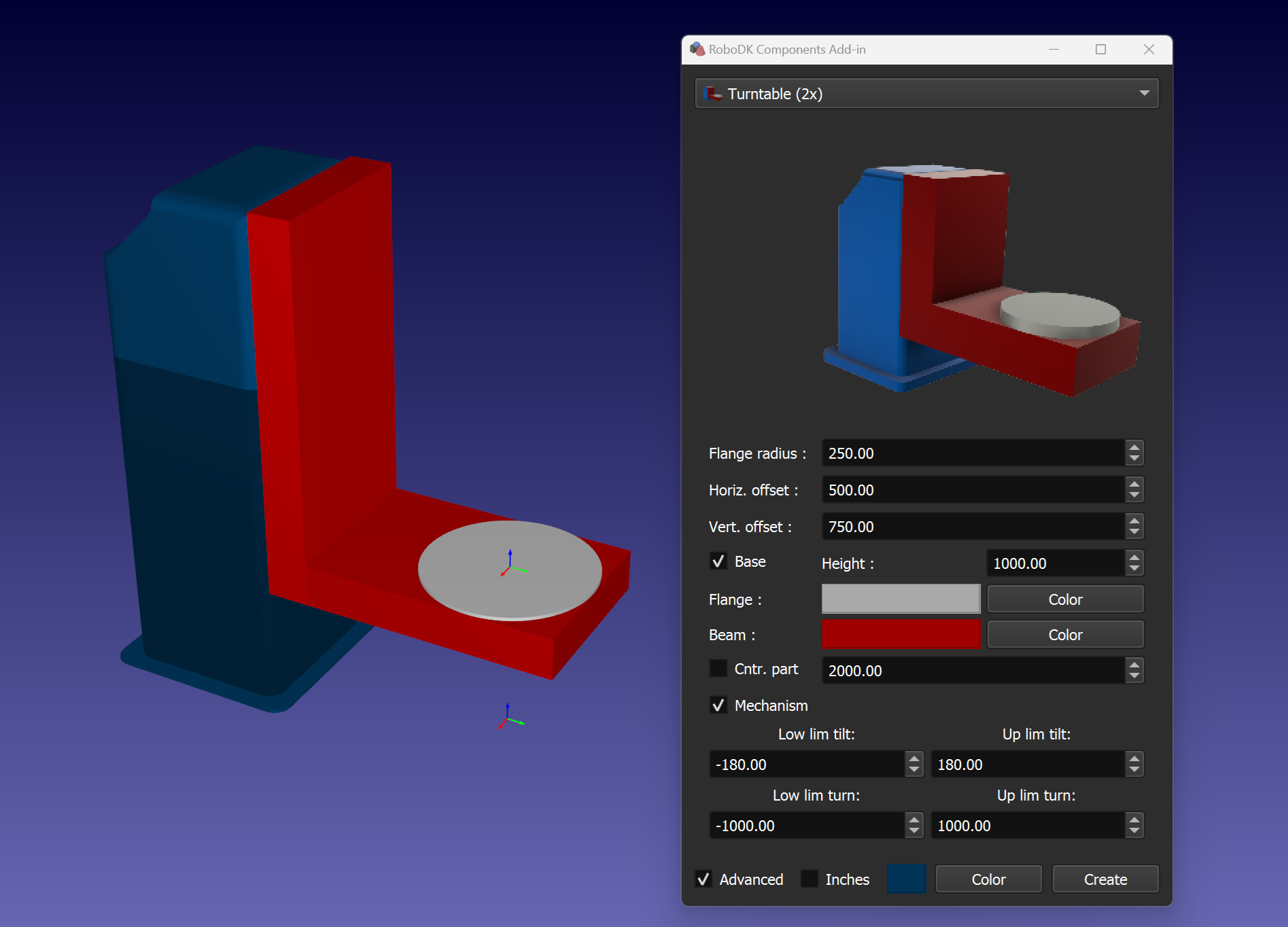
팁: 기준 확인란과높이매개변수를사용하여포지셔너지하실을만듭니다.
팁: 카운터파트가필요한경우Cntr. 파트 확인란과해당오프셋매개변수를사용할수있습니다.
팁: 메커니즘 확인란을사용하여틸트턴테이블메커니즘을만들수있습니다. 해당매개변수를사용하여모션제한을추가로설정할수있습니다.
플랜지반경, 측면및수평오프셋, 높이, 베이스, 빔및플랜지의색상등의파라미터를지정하여3축포지셔너를생성할수있습니다.
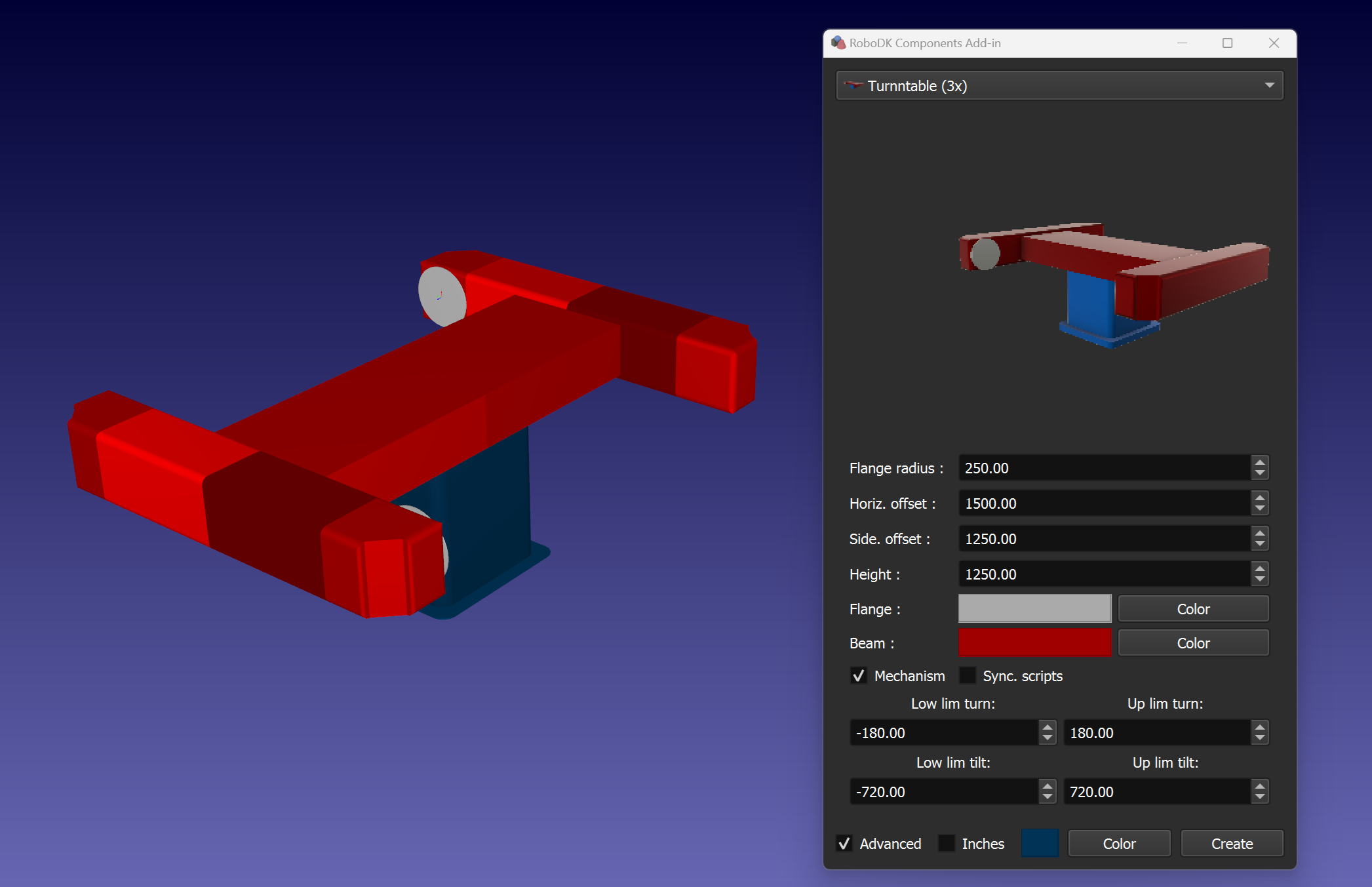
팁: 메커니즘 확인란을사용하여3축포지셔너메커니즘을만들수있습니다. 해당파라미터로모션제한을추가로설정할수있습니다.
팁: 동기화스크립트 확인란을사용하여해당스크립트를실행하여로봇을필요한가로축과동기화할추가 Python 스크립트를만들수있습니다.
참고: 기본적으로동기화스크립트예제가들어있는폴더는C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\입니다.
치수(X, Y, Z)를지정하여상자를만들수있습니다.
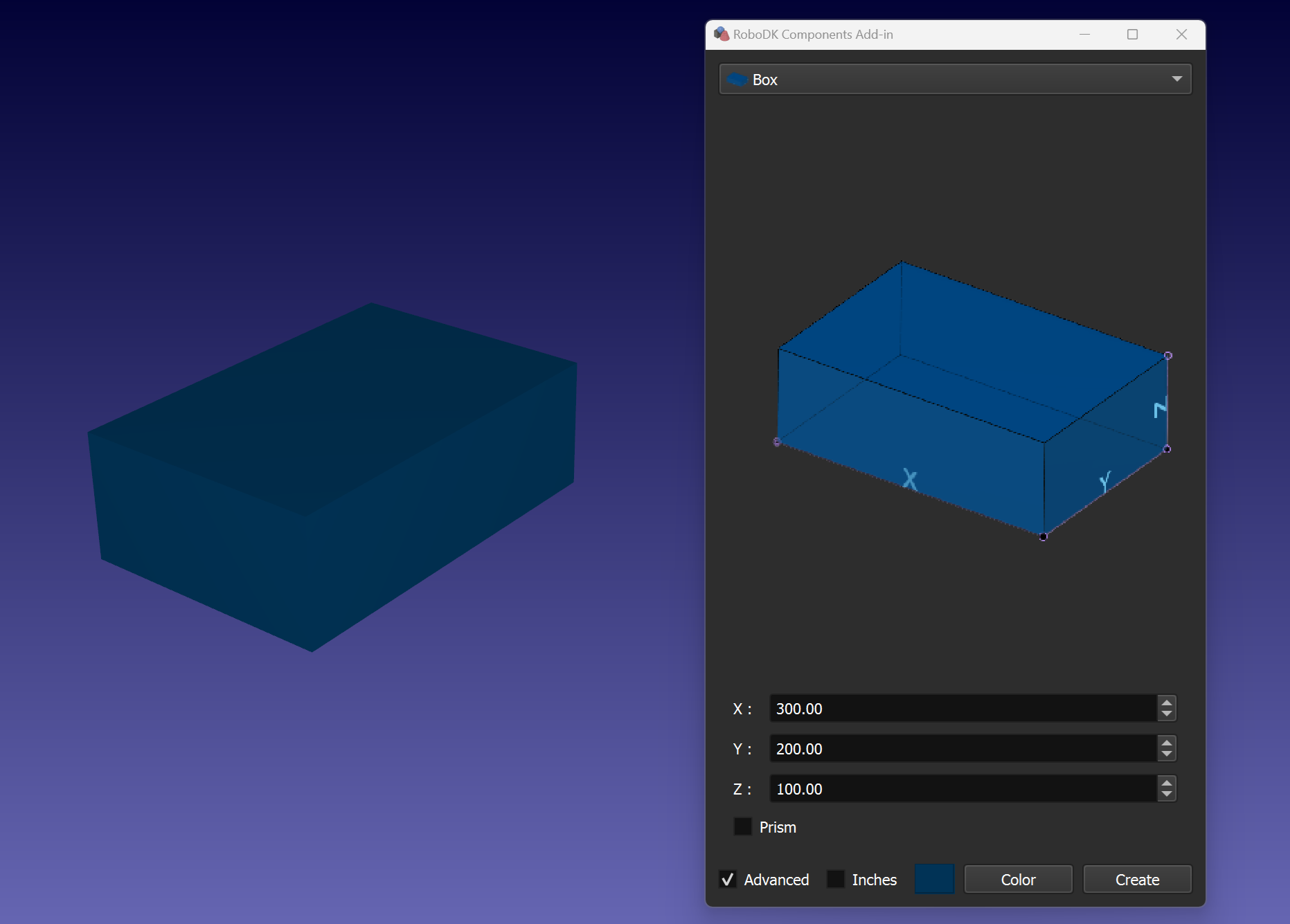
팁: 프리즘 확인란을사용하여프리즘을만듭니다.
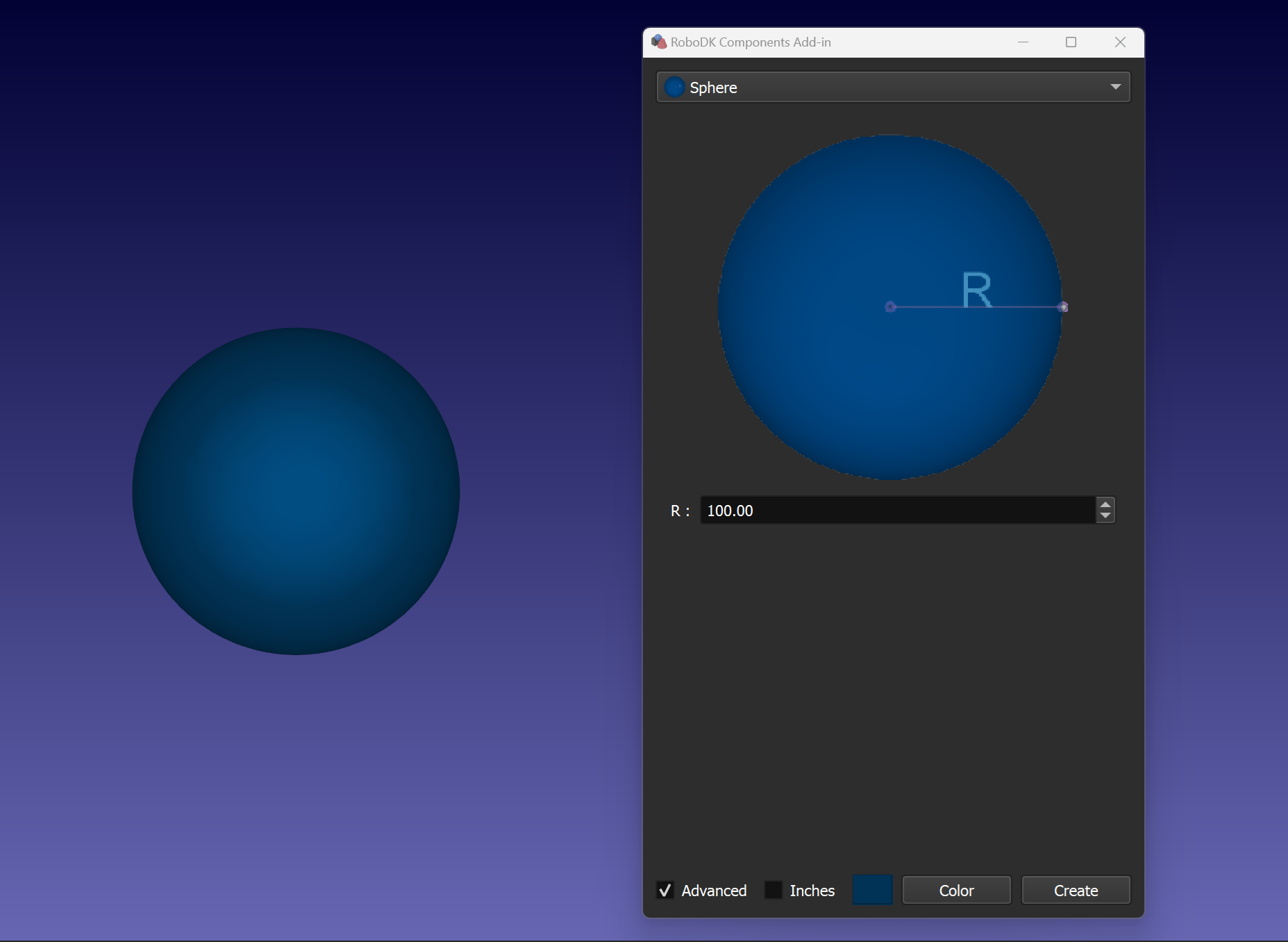
반경(R)을지정하여구를만들수있습니다.
치수(R1, R2, H) 및품질매개변수를지정하여원뿔을만들수있습니다.
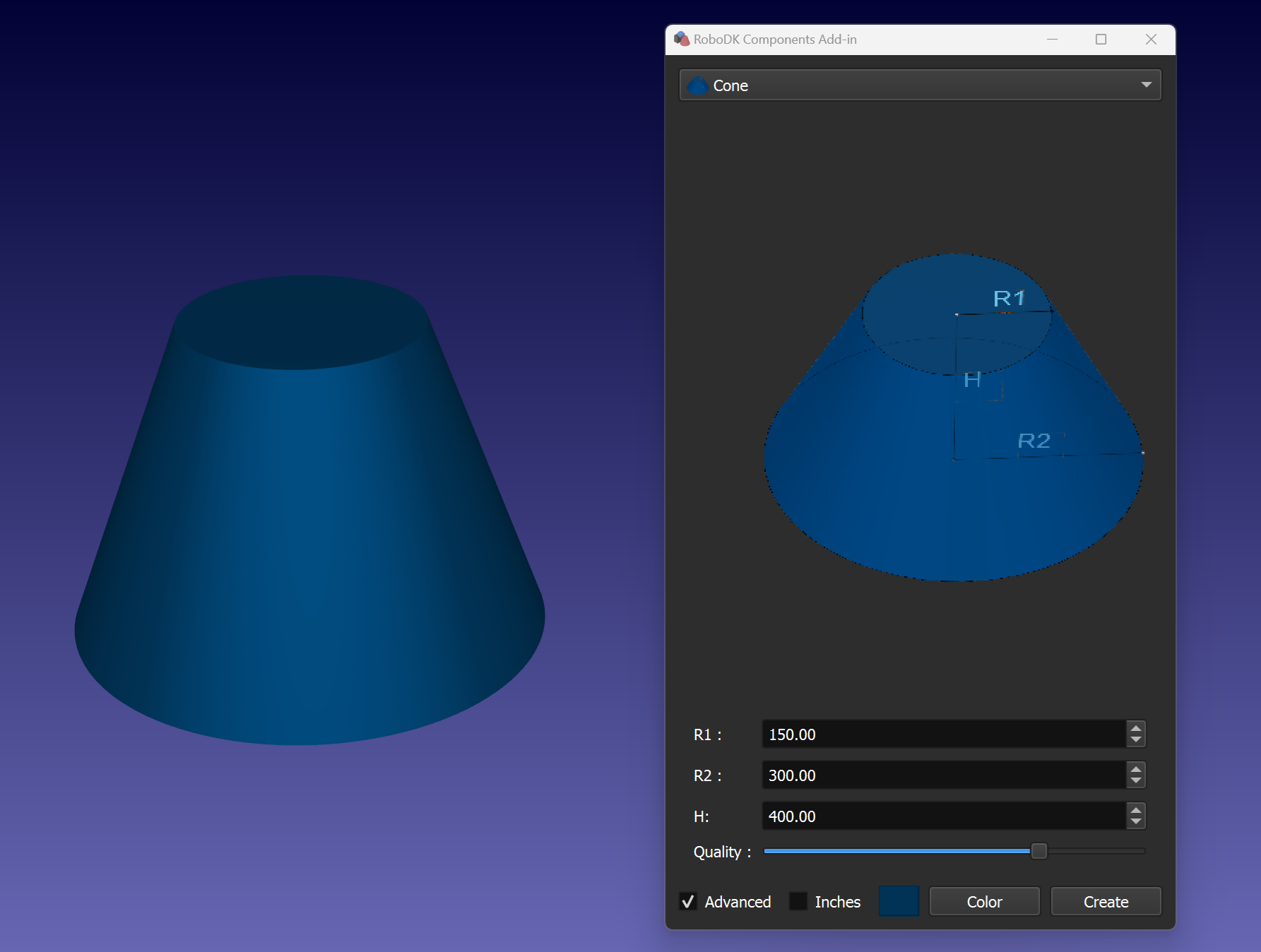
팁: R1이R2와 같으면원통이생성됩니다.