시뮬레이션
비디오피드에방송국에셋을정확하게오버레이하려면시뮬레이션카메라를만들어야합니다. 이시뮬레이션카메라는기준점마커를사용하여계산된카메라포즈와궤적을사용하여입력비디오피드와동일한각도, 거리및궤적에서 RoboDK 스테이션을녹화합니다.
마커스케일링이정확하려면이시뮬레이션된카메라해상도가입력비디오와일치해야합니다. 방송국에가상카메라를추가하는단계는아래에설명되어있습니다:
1.도구모음에서이미지 처리 편집기 à RoboDK 카메라 추가를 선택하여스테이션에카메라를추가합니다.
2.카메라또는카메라피드를마우스오른쪽버튼으로클릭하고 '카메라설정'을선택합니다.
3.입력비디오피드의해상도에맞게가상카메라설정을조정합니다.
4.시뮬레이션된카메라가가상아루코마커를볼수있도록기준프레임을정렬합니다.
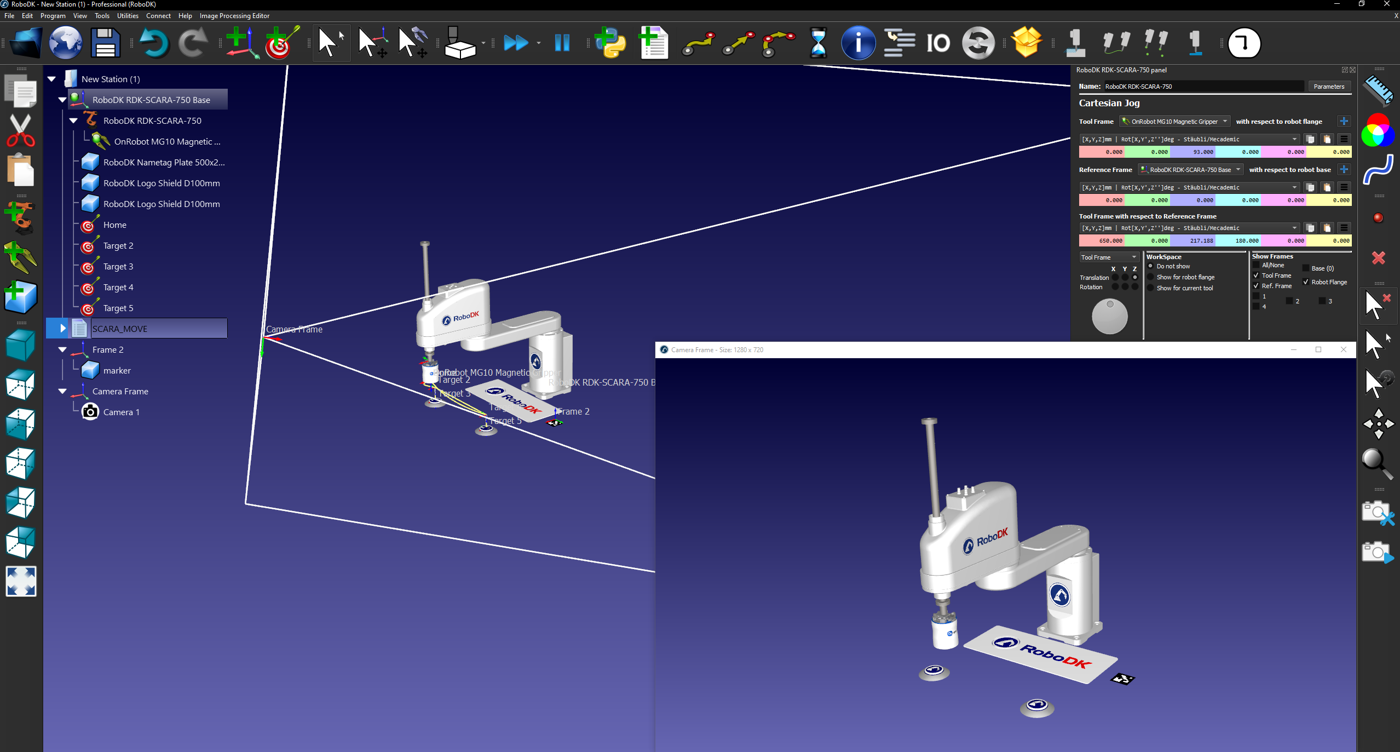
팁: 렌더링시간동안모든스테이션오브젝트가시야에들어오도록필요에따라초점거리와작업거리를조정할수있습니다. 다음이미지는1280x720p 해상도로적절하게구성된가상카메라를보여줍니다.
최상의결과를얻으려면다음사항을고려하여실제입력동영상을녹화해야합니다:
1.조명이밝은환경의평평한표면에마커를놓습니다. 최적의결과를얻으려면마커및녹화환경에대한가상스테이션의물체크기와거리를고려하세요.
2.일관된카메라설정(실제카메라와시뮬레이션카메라의해상도설정이일치해야함).
3.가독성있는아루코신분증(카메라가신분증을읽을수있도록유지해야합니다. 피해야할사항: 빠르고흐릿한영상, 낮은카메라해상도, 카메라로부터마커거리가먼경우).
4.동영상이 .mp4 또는 .avi 형식인지확인합니다.
팁: 고해상도/FPS 입력피드는렌더링하는데시간이오래걸릴수있습니다. 720p/60fps 이상의영상의경우, 카메라 AR에서동영상렌더링시간이상당히길고 FPS가낮을것으로예상됩니다.