RoboDK
이섹션에서는 RoboDK에서시뮬레이션을 Blender로익스포트하는방법을보여줍니다.
RoboDK 시뮬레이션을내보내려면다음단계를따르세요:
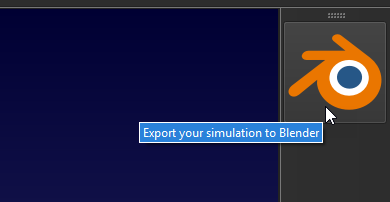
1.화면오른쪽에있는Blender 내보내기아이콘을클릭합니다.
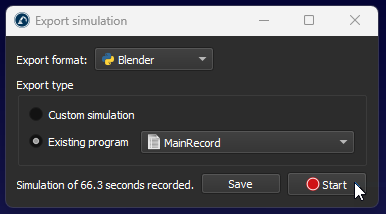
2."기존 프로그램"을선택하고메인시퀀스프로그램을선택합니다.
3.녹화를시작하려면 '시작'을클릭하세요.
4.프로그램이종료되면창이나타나고이전에만든폴더를선택한다음 "저장"을클릭합니다.
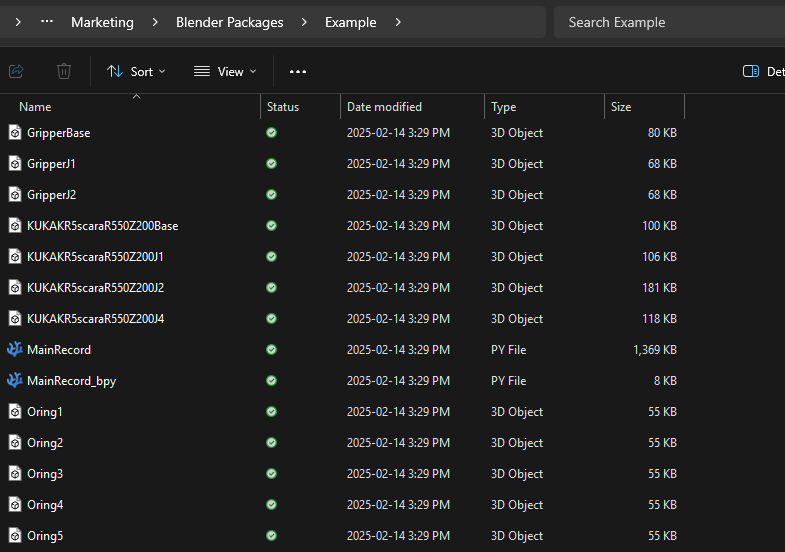
참고: 이제폴더로이동하면내보내기가성공했음을의미하는.py 및.ply 파일이표시되어야합니다.
팁: 팁: 내보내기파일을저장할때 RoboDK가여러파일(.PLY, .py)을생성하므로새폴더를만드세요.
팁: 애니메이션데이터를세분화하려면 시뮬레이션 속도를 1.0 이하로낮추세요.
참고: 시뮬레이션전체에서보이지않거나 3D 모델이없는오브젝트(메시없음)는익스포트되지않습니다.
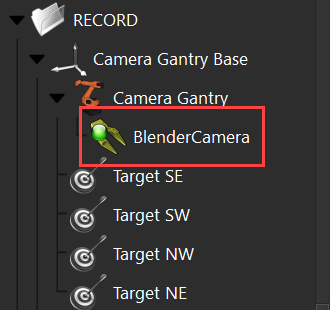
팁: RoboDK에서 "BlenderCamera"라는이름의오브젝트에블렌더카메라가자동으로연결됩니다. RoboDK를사용하여 "BlenderCamera"라는이름의오브젝트또는도구를이동하여 Blender 카메라시퀀스를만들수있습니다.
내보낸 RoboDK 시뮬레이션을 Blender로가져오려면다음단계를따르세요:
1.블렌더를엽니다.
2.'일반' 기본템플릿을사용하고포함된개체(큐브)를삭제합니다.
3.선택적으로시스템콘솔창을 엽니다➔ 시스템 콘솔 토글하기
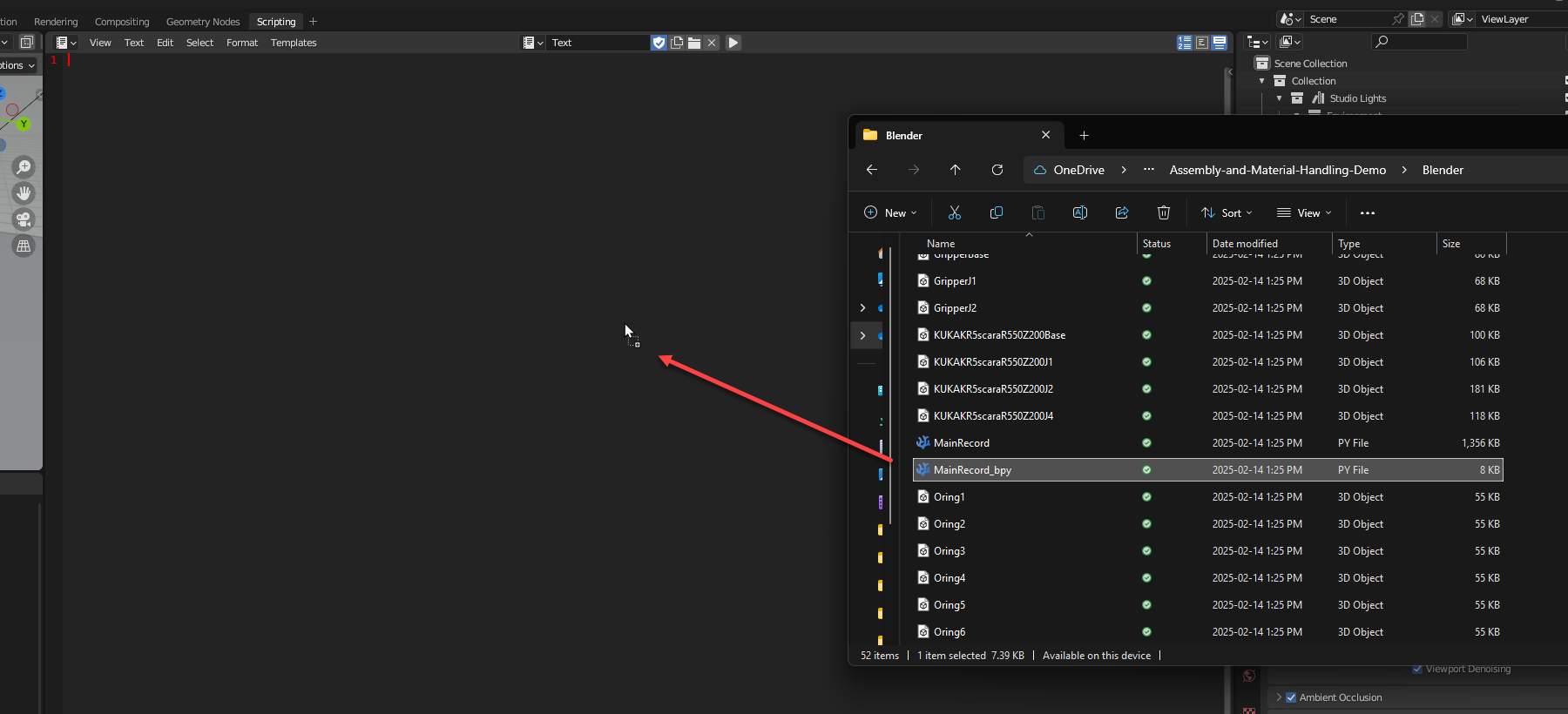
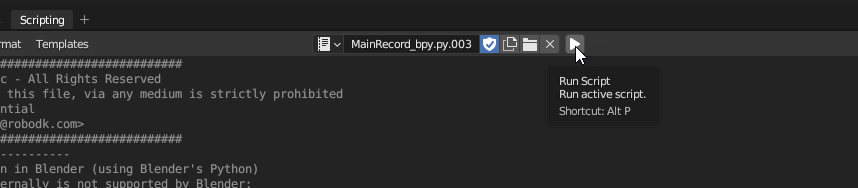
4.스크립팅보기로이동하여 "_bpy.py"로끝나는 Python 파일을엽니다(+➔ 일반➔ 스크립팅➔ 열기).
5.스크립트 실행➔ 스크립트 실행 또는Alt+P로스크립트를실행합니다.
6.스크립트가완료될때까지기다립니다(시스템콘솔에서활동을확인합니다). 시뮬레이션의크기에따라이과정은몇분정도걸릴수있습니다.
참고: 시뮬레이션크기와오브젝트의복잡성에따라다소시간이걸릴수있습니다.
팁:고급사용자는목표 FPS와같은일부매개변수를사용할수있으므로 Python 스크립트를편집할수있습니다.
블렌더내보내기/가져오기가의도한대로작동하는지확인합니다:
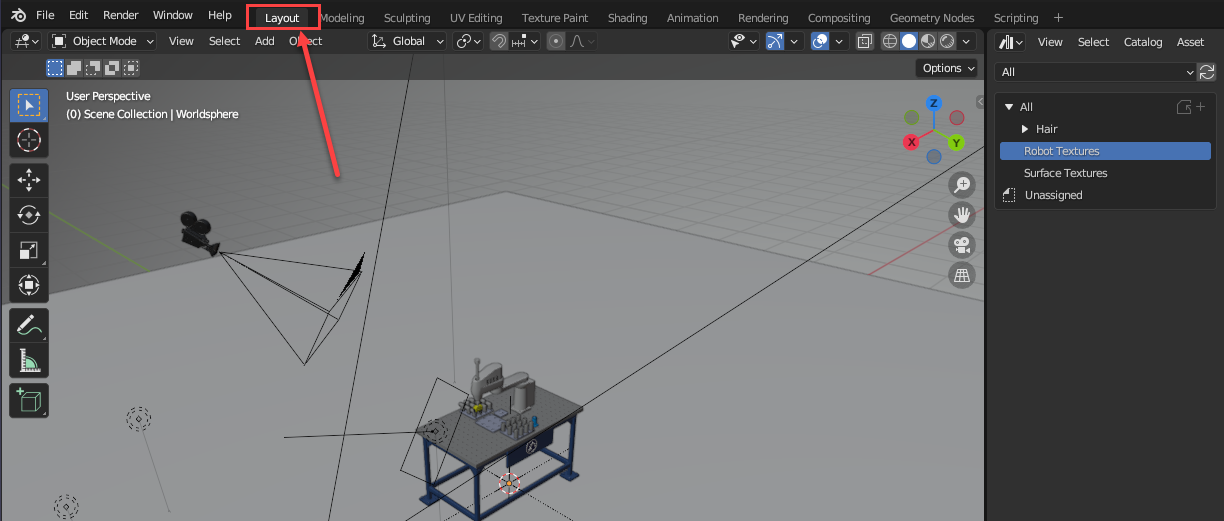
1."레이아웃" 탭으로이동하면중앙에로봇스테이션이표시됩니다.
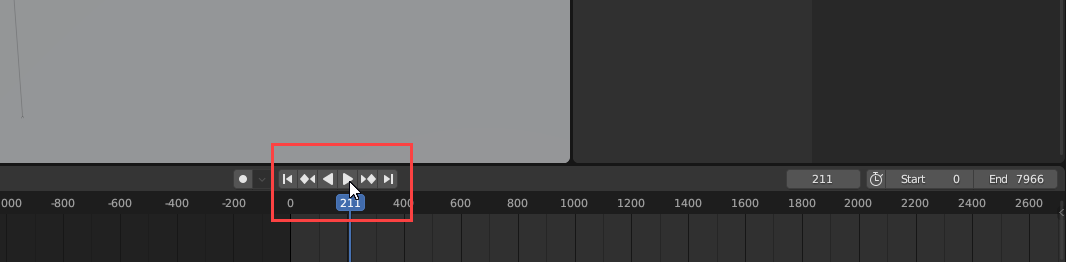
2.화면하단에서'재생' 버튼을찾아클릭합니다.
3.로봇이움직이기시작해야합니다. 그렇지않은경우내보내기및가져오기단계로돌아가서단계를놓치지않았는지확인하세요.