로봇
로봇연결버튼의아래쪽화살표를사용하여사용가능한로봇메뉴를표시하고시뮬레이션을해당로봇중하나에연결하십시오. 버튼이선택된상태(로봇이연결된상태)인경우, 버튼을누르면로봇이시뮬레이션에서연결이해제됩니다.
로봇과시뮬레이션간의연결은스테이션트리의컨텍스트메뉴를통해서도수행할수있습니다.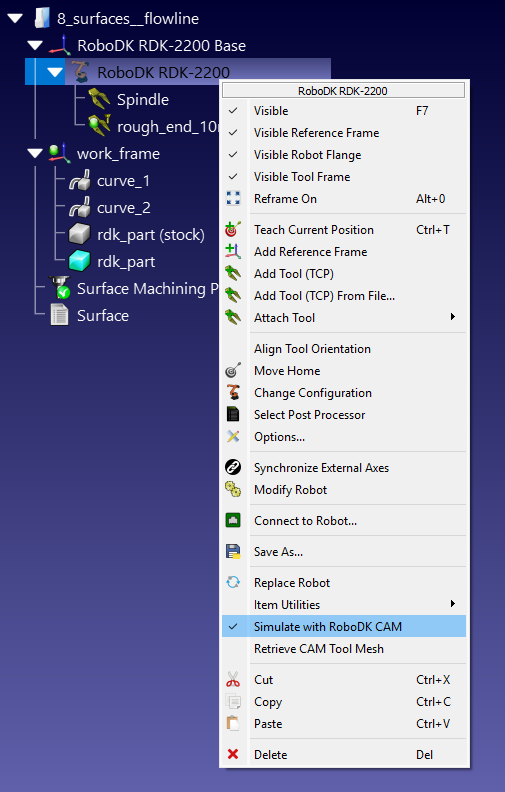
로봇이시뮬레이션에연결되면 RoboDK 창에서수행되는모든로봇동작이시뮬레이터에의해공구동작으로재현됩니다. 이동작의출처가 RoboDK 프로그램, Python 스크립트또는마우스로의수동조작인지는관계없습니다.
참고: 로봇연결명령은 CAM-Link 로봇 메뉴에서도사용할수있습니다.