로봇
다음단계에따라로봇가공프로젝트에서자동충돌검사및충돌회피를활성화하십시오.
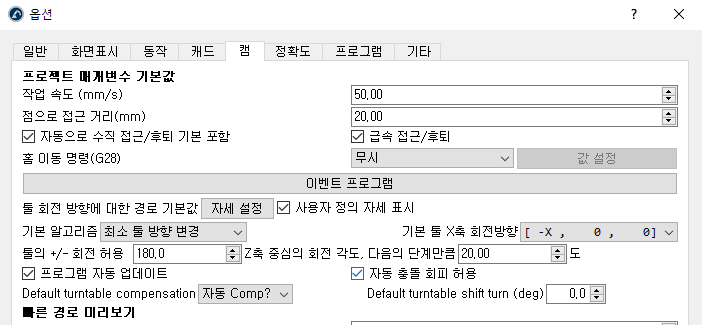
1.도구 ➔ 옵션 ➔ 캠을선택하십시오.
2.자동충돌회피허용을선택하십시오.
3.로봇 가공프로젝트, 3D 프린팅, 곡선추적또는점추적프로젝트를더블클릭하십시오.
4.충돌 회피:최적화매개변수에설명된대로 Z 축주위의공구방향을변경하여자동충돌회피를활성화할것입니다.

중요: 이옵션은공구의 Z 축을중심으로회전하여충돌을자동으로피하려고합니다. 공구커터가부품과의충돌을점검하지않았는지확인하십시오. 공구홀더와부품사이의충돌을확인하려면스핀들을2개의공구 (충돌감지에사용되는공구와절단기와같은추가시각화정보가있는공구)로나눠야할수있습니다.
팁: 로봇가공경로의충돌감지에는계산시간이오래걸릴수있습니다. 충돌감지및회피프로세스의속도를높이려면충돌맵의범위를좁히십시오.