충돌
도구➔
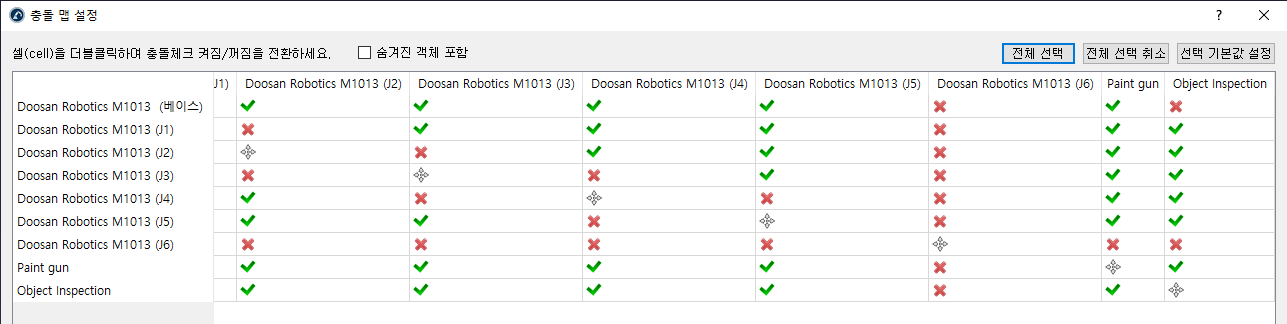
기본적으로 RoboDK는모든로봇링크, 객체및도구를포함하여스테이션의모든움직이는객체간의충돌을확인합니다. 예외적으로, 연속적인로봇조인트는항상접촉할수있으므로충돌을검사하지않습니다.
팁: 대각선에서상자를더블클릭하여, 다른모든객체와특정객체간의충돌을선택/ 취소하십시오.
팁: 충돌검사로인해시뮬레이션속도가느려지면충돌검사에컴퓨터성능을적게사용하도록검사수를줄이는것이좋습니다.
도구➔
기본적으로 RoboDK는모든로봇링크, 객체및도구를포함하여스테이션의모든움직이는객체간의충돌을확인합니다. 예외적으로, 연속적인로봇조인트는항상접촉할수있으므로충돌을검사하지않습니다.