조인트
어떠한작업이로봇작업공간을모두사용하는경우는거의없습니다. PRM 맵을생성할때로봇의조인트한계를제한하는것이좋습니다. 그렇게하면맵생성프로세스속도가빨라지고해당맵내의포인트가최상의위치에있게됩니다.
6축로봇의경우가장자주제한되는두개의조인트는다음과같습니다.
1.조인트 1(베이스 조인트) - 이조인트를제한하면로봇이작업공간의어느한쪽으로너무멀리이동하는것을막습니다.
2.조인트 3(팔꿈치 조인트) - 이조인트를제한하면로봇의팔꿈치구성과구성간에변경되는것을막을수있습니다.
다음프로세스를사용하여조인트한계를변경하십시오.
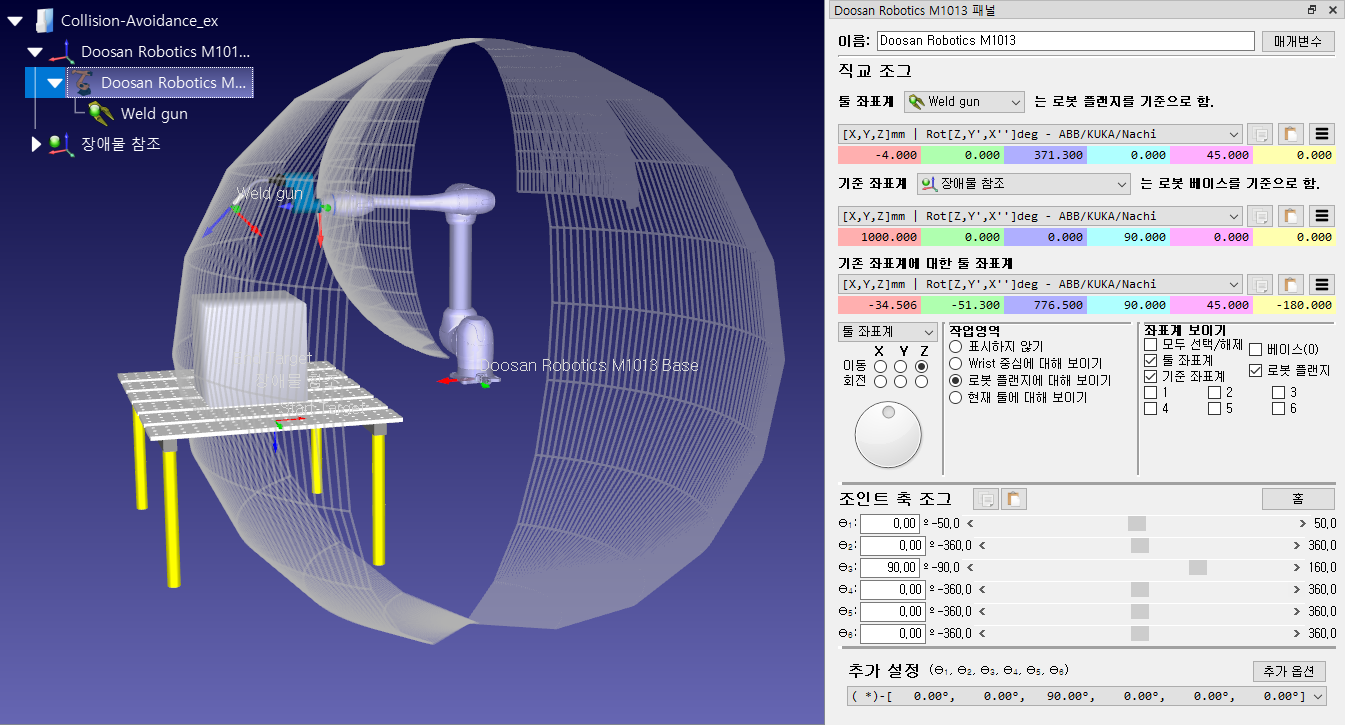
1.스테이션트리내에서로봇모델아이콘(예: Doosan Robotics M1013)을마우스오른쪽버튼으로클릭하고옵션…을선택하여로봇패널을엽니다. 또는스테이션트리에서로봇이름을두번클릭하십시오.
2.조인트 축 조그섹션에서제한하려는로봇조인트의슬라이더 (예 : θ1 및θ3)를이동하여원하는조인트하한의위치를찾으십시오.
3.조인트 축 조그내에서조인트하한을더블클릭하십시오. 예를들어, θ1의접합한계가현재 -180이면숫자 -180을두번클릭하십시오. 조인트 하한값 설정 패널이나타날것입니다.
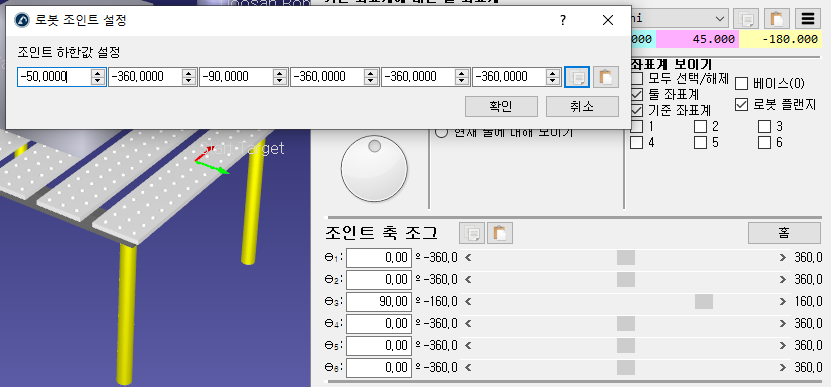
4.조인트하한을θ1 = -50 및θ3 = -90으로설정하십시오.
5.관절제한을변경하고확인을클릭하십시오.
6.조인트상한값에같은과정으로θ1 = 50을설정하십시오.

이변경사항은로봇의접근가능한작업공간을보면알수있습니다. 로봇패널의작업 공간섹션에서현재 툴 보여주기옵션을선택하여작업공간을표시하십시오. 이제새로운조인트한계로작업공간의일부에만도달할수있음을보여줍니다.