로드맵
동작플래너의 "구성단계"는로봇의작업공간로드맵을생성하는다음프로세스를사용하여달성됩니다.
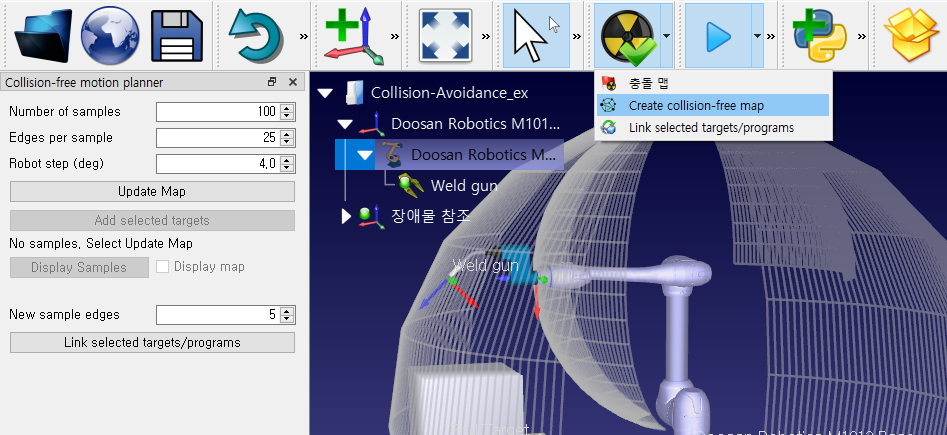
1.유틸리티 메뉴 → 충돌 없는 동작 플래너 → 충돌 없는 맵 생성으로이동하여충돌없는동작플래너패널을열거나
2.새매개변수를입력하거나기본값을유지하십시오.
3.맵 업데이트를클릭하여로드맵을생성하십시오.
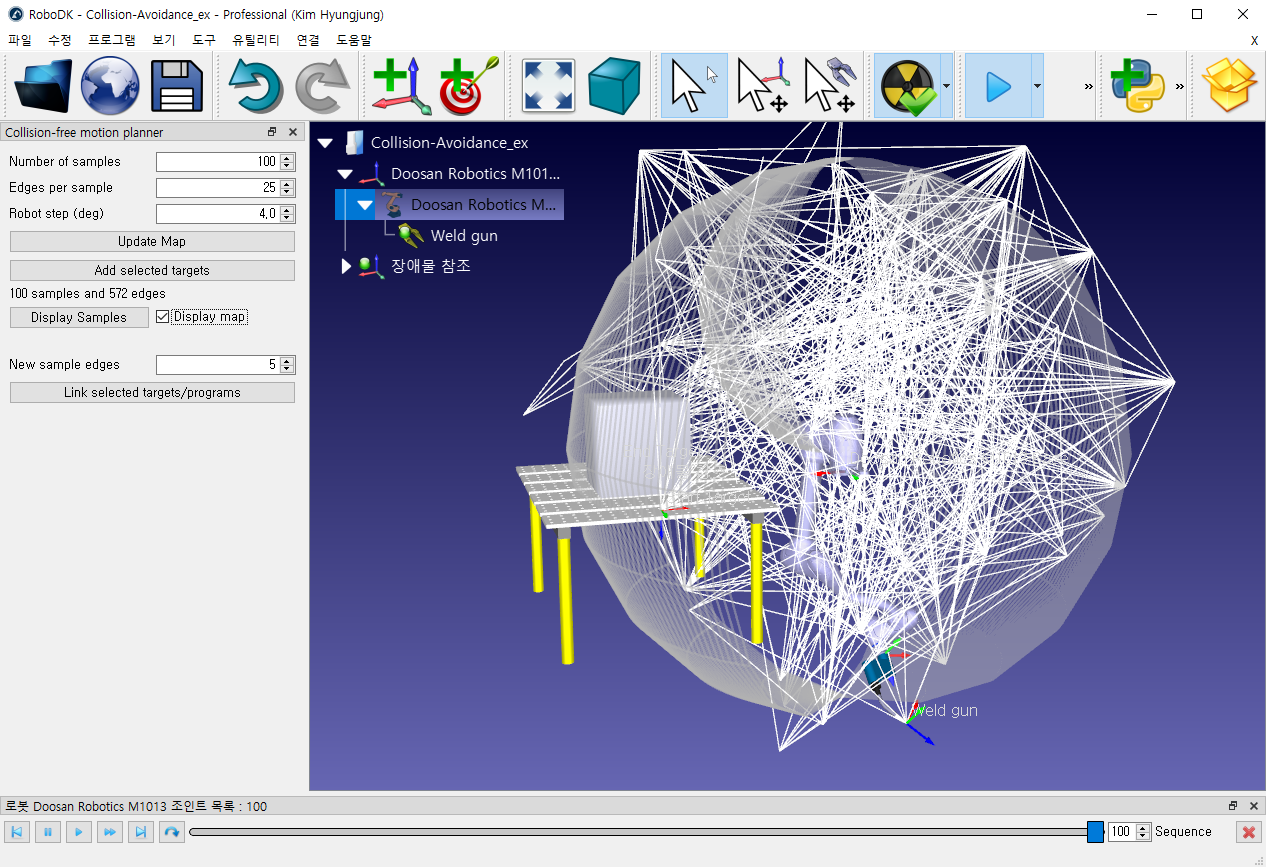
PRM 알고리즘은선택한매개변수를사용하여로드맵을생성합니다. 완료되면맵 보여주기상자를선택하여생성된로드맵을볼수있습니다. 샘플 보여주기를클릭하면작업공간내의모든샘플을통해로봇이이동합니다.