동작
동작플래너를사용하려면도구가있는로봇이있어야합니다. 또한, 작업공간내에하나이상의객체를두는것이합리적입니다. 그렇지않으면충돌회피가필요하지않습니다. 생성된충돌없는경로의시작및끝위치로사용할대상을두개이상지정하면도움이될수있습니다.
용접설정예는다음프로세스를사용하여만들수있습니다.
1.로봇선택
a.파일➔
b.필터를사용하여로봇을찾으십시오. 예를들어, Doosan Robotics M1013을선택하십시오(Doosan Robotics(브랜드), 5 ~ 10 kg 가반하중및 1,000 ~ 1,500 mm 도달범위필터선택).
c.다운로드를선택하면주화면에로봇이자동으로나타납니다.
2.툴선택
a.먼저필터 재설정을클릭하여이전필터를제거하고, 같은온라인라이브러리에서종류 ➔ 툴로필터링하십시오.
b.“Weld Gun(용접도구)”과같은예시의툴을다운로드하십시오.
c.툴은자동으로로봇에부착될것입니다.
d.툴이로드되면온라인라이브러리를닫아도됩니다.
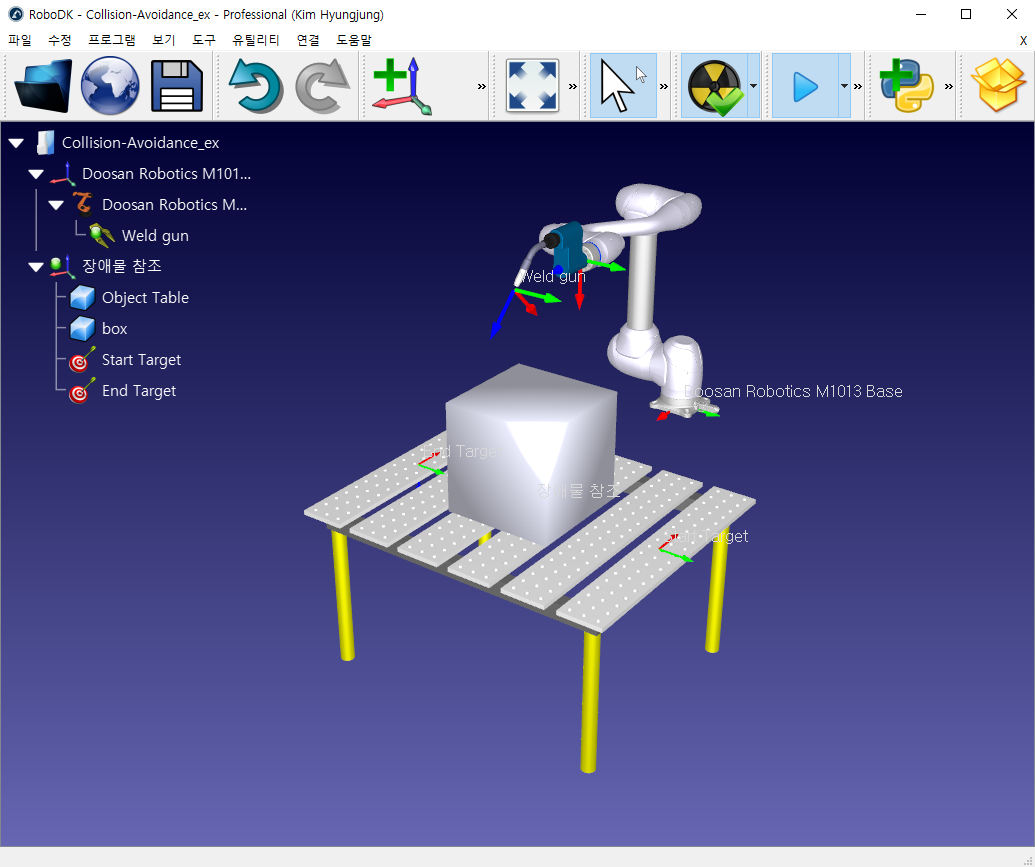
3.기준좌표계추가
a.프로그램 ➔ 
b.트리에서새로운기준좌표계를선택하고, F2를눌러이름을“장애물참조”로변경하십시오.
4.목표추가
a.파일 ➔
b."Object Table.wrl"와같은개체를선택하십시오.
c.스테이션트리내에서객체를장애물참조로끌어다놓습니다.
d."box.stl"과같은다른객체를선택하고장애물참조로드래그하십시오.
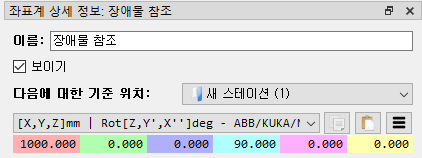
e.아래내용을수행하여테이블을로봇앞쪽으로이동하십시오.
i.장애물참조를마우스오른쪽버튼으로클릭하고 "옵션"을선택하거나트리에서참조를두번클릭하면프레임세부정보패널이나타납니다.
ii.다음에대한기준 위치라는이름의패널에다음값을입력하십시오. 프로젝트 이름 : 1000, 0, 0, 90, 0, 0
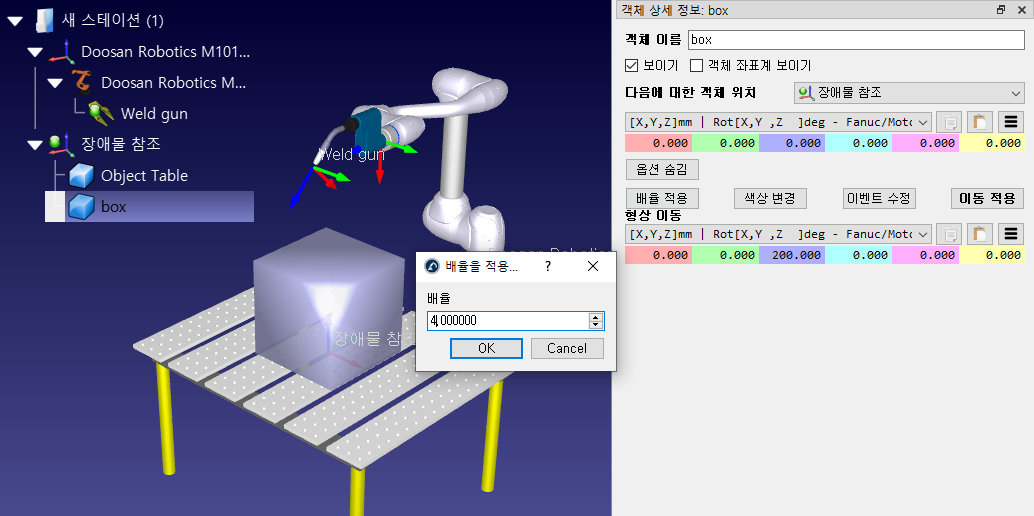
f.필요한경우다음단계에따라객체의크기와위치 (예: "상자")를늘리십시오.
iii.스테이션트리에서객체를마우스오른쪽버튼으로클릭하고옵션을선택하거나트리에서객체를두번클릭하면객체세부정보패널이나타납니다.
iv.추가 옵션… ➔ 배율 적용을클릭하여상자의크기를조정하고배율에 "4.0"을입력하십시오.
v.장애물 참조에 대한 객체 위치라는패널에0, 0, 200, 0, 0, 0값을입력하여상자를테이블로이동하십시오.
5.타겟생성
a.프로그램 ➔ 
b.스테이션트리에서새타겟을선택하고 F2를선택하여이름을Start Target으로바꿉니다.
c.다음을수행하여타겟을이동하십시오.
vi.스테이션트리에서타겟을마우스오른쪽버튼으로클릭하고옵션을선택하거나 F3을눌러Start Target패널을표시하십시오.
vii.장애물 참조 패널에대하여대상위치에다음값을입력하십시오. 500, 0, 0, 90, 0, 180
d.같은방식으로두번째대상을만들고이름을End Target으로바꿉니다. 이전과같은방법으로 -500, 0, 0, 90, 0, 180 위치로옮깁니다.