손과
핸드-아이보정은로봇플랜지또는도구에대한카메라의위치를보정하는프로세스입니다.
RoboDK를사용하면핸드-아이보정프로세스를시뮬레이션할수있습니다. 동일한절차를사용하여로봇플랜지또는도구와관련하여실제카메라를보정할수있습니다.
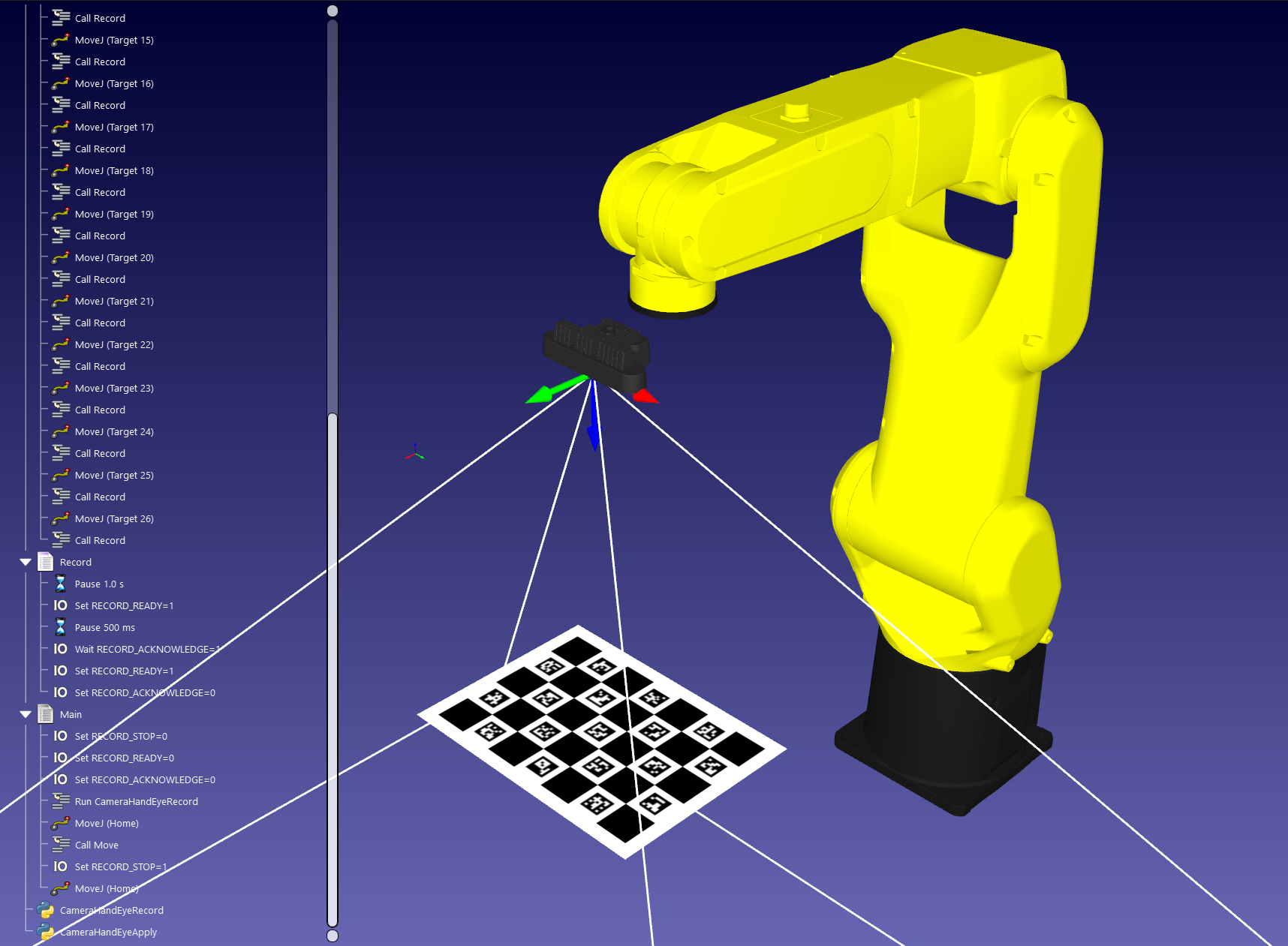
Python용 RoboDK API의예제섹션(https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration)에서완전히작동하는예제를찾을수있습니다.
핸드-아이보정은로봇플랜지또는도구에대한카메라의위치를보정하는프로세스입니다.
RoboDK를사용하면핸드-아이보정프로세스를시뮬레이션할수있습니다. 동일한절차를사용하여로봇플랜지또는도구와관련하여실제카메라를보정할수있습니다.
Python용 RoboDK API의예제섹션(https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration)에서완전히작동하는예제를찾을수있습니다.