마스터캠
마스터캠에서 3D 개체를열고절단시뮬레이션을시작합니다. 이예제에서 3D 개체는마스터캠도구를사용하여이미절단경로가생성된금형금속조각입니다
이예를단순화하기위해해당부품을가공하는데필요한패스횟수를크게줄였습니다. 실제로는금형에훨씬더많은선이나절삭경로가있어공구가실제로작동하는것을볼수없습니다.
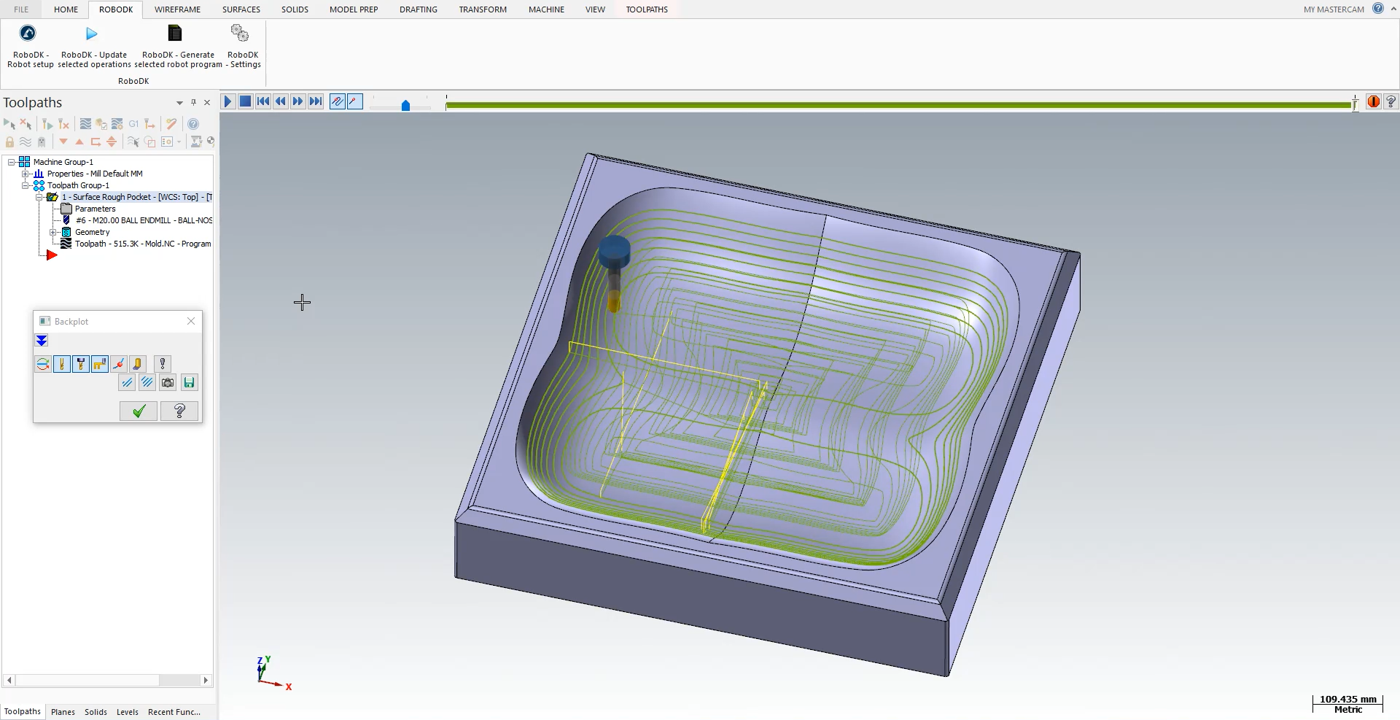
마스터캠커팅시뮬레이션은프로그램중에공구가수행해야하는모든동작을보여줍니다.
다음단계에따라 RoboDK에파트를로드합니다:
1.RoboDK 탭을선택하고RoboDK - 로봇 설정을 선택합니다.
2.부품 로드를 선택합니다.
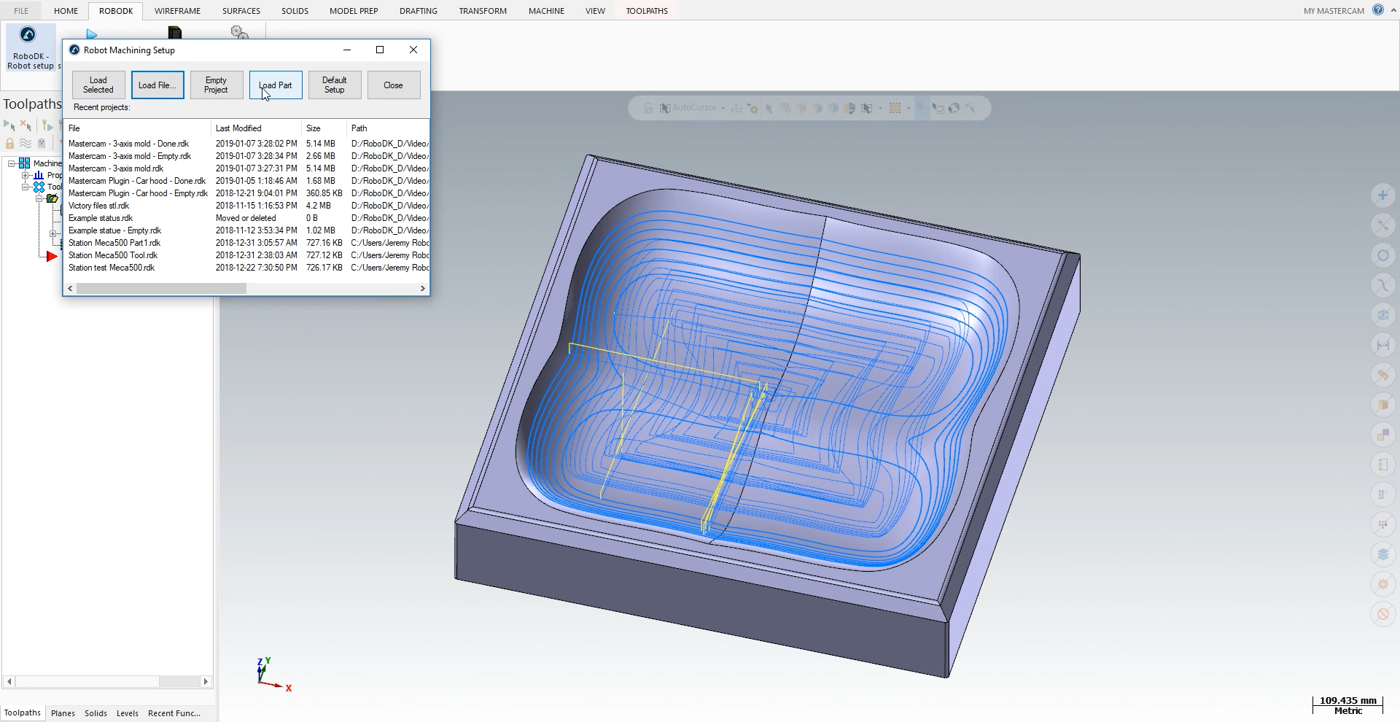
RoboDK 스테이션의테이블에활성기준프레임(가공기준)에로드된파트가표시되어야합니다.
다음단계는마스터캠에서 RoboDK로커팅경로를가져오는것입니다.
1.마스터캠에서RoboDK 탭을선택합니다.
2.RoboDK 선택- 선택한 작업을 업데이트합니다.
3.RoboDK로이동합니다.