RoboDK
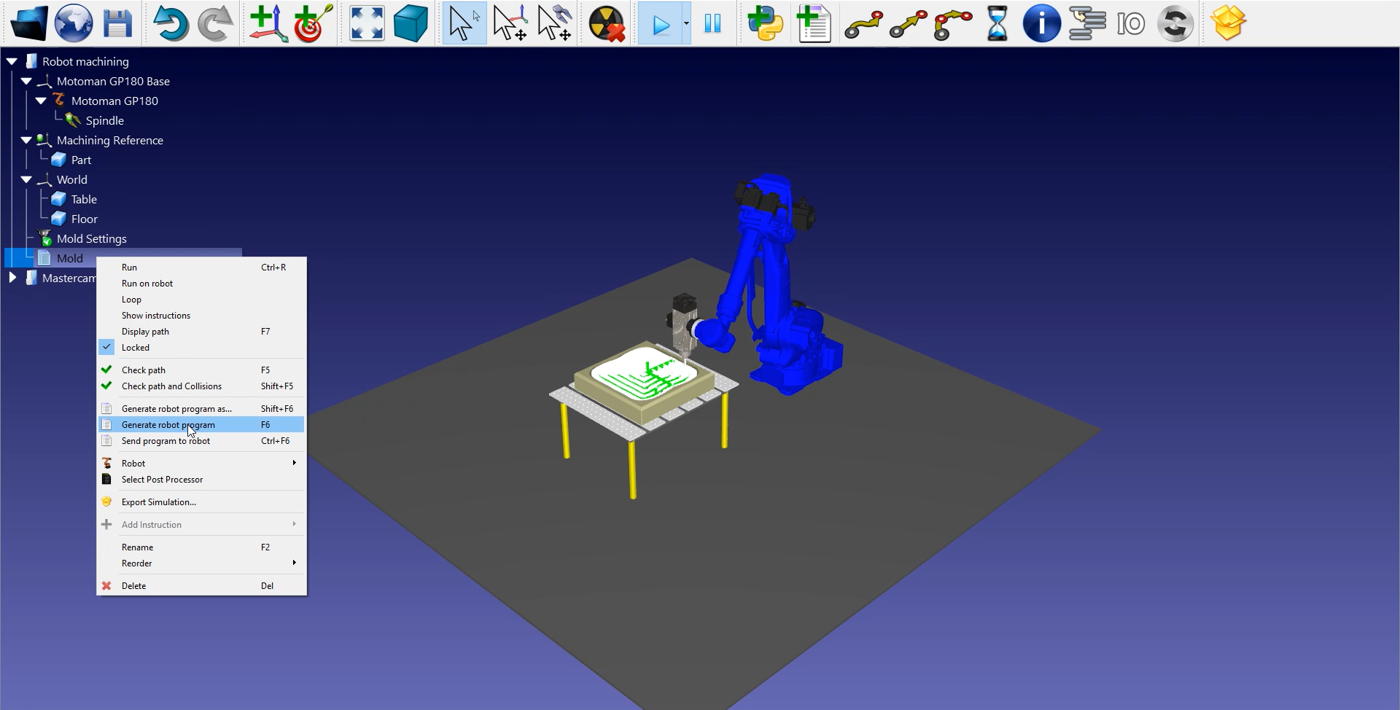
로봇 가공경로를 RoboDK에서가져오면로봇가공공구경로가 RoboDK 스테이션의금형참조에첨부된것을볼수있습니다. 
절단경로전후로접근및후퇴이동의값을조정할수도있습니다. 이예에서는100mm가적당합니다. 충돌위험이있는경우로봇작업범위내에서원하는만큼늘릴수있습니다.
다음단계는
참고: 스페이스바를길게누르거나메뉴의
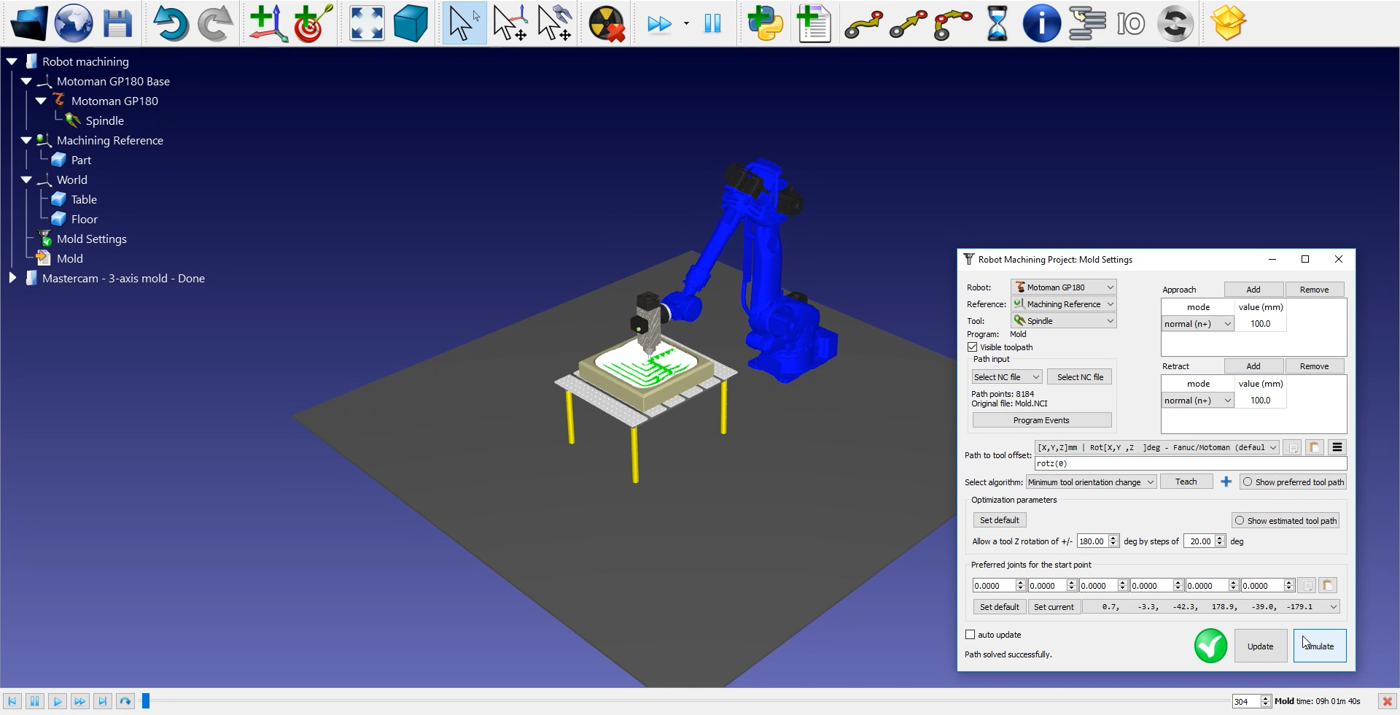
참고: 경로를따라도구의방향을조정할수있습니다. 이예제에서는 Z축을중심으로도구를회전하는것만수정할수있지만표준방향을사용하는것이좋습니다.
도구방향을조정하려면다음단계를따르세요:
1.
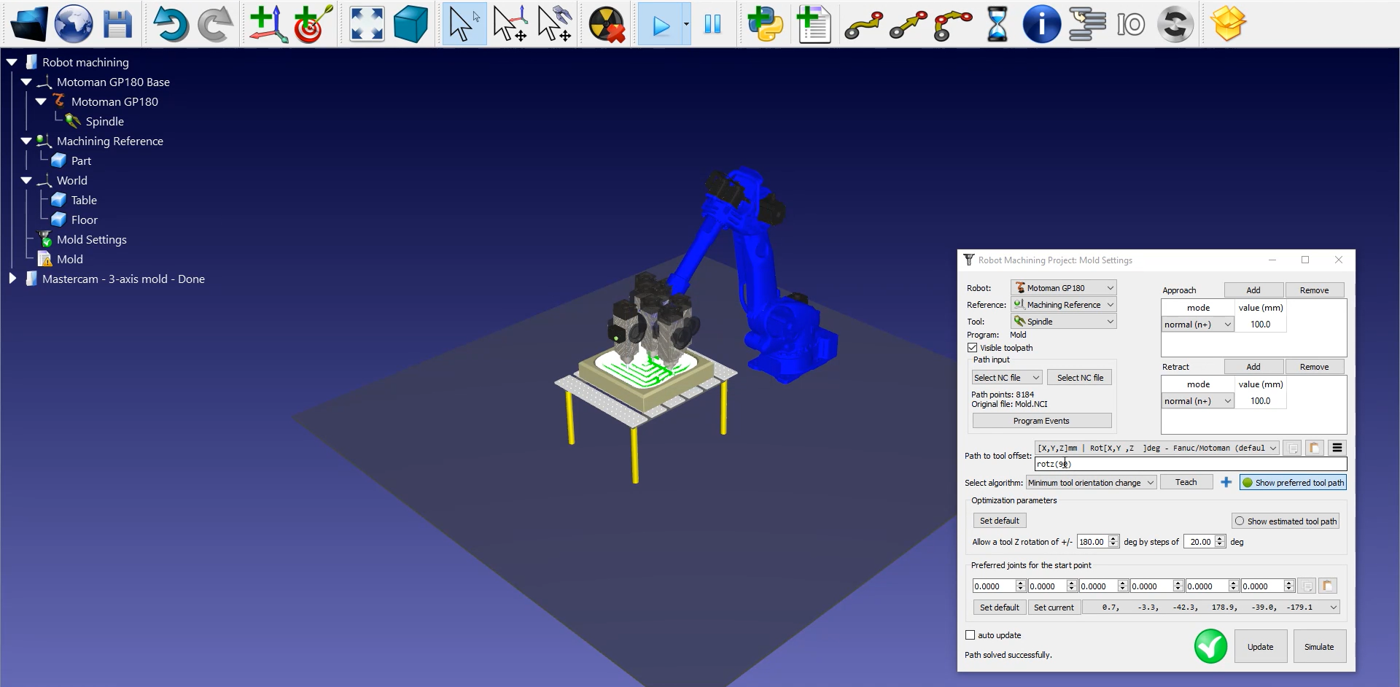
2.기본 도구 경로 표시를 선택합니다. 아래이미지와같이일부고스트도구가나타납니다. 이는경로를따라도구의위치를나타냅니다.
3.휠을90도까지 스크롤하여로츠(0) 값을수정합니다. 로츠값이변경되고고스트통행료위치도함께변경되는것을볼수있습니다.
4.업데이트➔ 시뮬레이션을 선택합니다.
로봇프로그램을생성하려면올바른포스트프로세서를사용해야합니다. 
마지막으로
이제모토만JBI 파일을로봇컨트롤러로전송할준비가되었습니다.