로봇
업데이트를 선택하여 APT 파일을로드한후 RoboDK에서로봇가공시뮬레이션을생성할수있습니다. 이를통해로봇이제조작업을수행할수있는지확인할수있습니다.
이예는간단한 3축가공작업이며기본설정으로유효한결과를제공합니다. 로봇가공프로젝트를사용하면가공공구경로를따라로봇이작동하는방식을제어할수있습니다.
다음단계에따라나머지로봇가공작업을업데이트할수있습니다:
1.하나이상의로봇가공작업을선택합니다(Shift 키를누른채로트리에서여러항목을생성할수있습니다).
2.선택한항목을마우스오른쪽버튼으로클릭합니다.
3.프로그램 업데이트를 선택합니다.
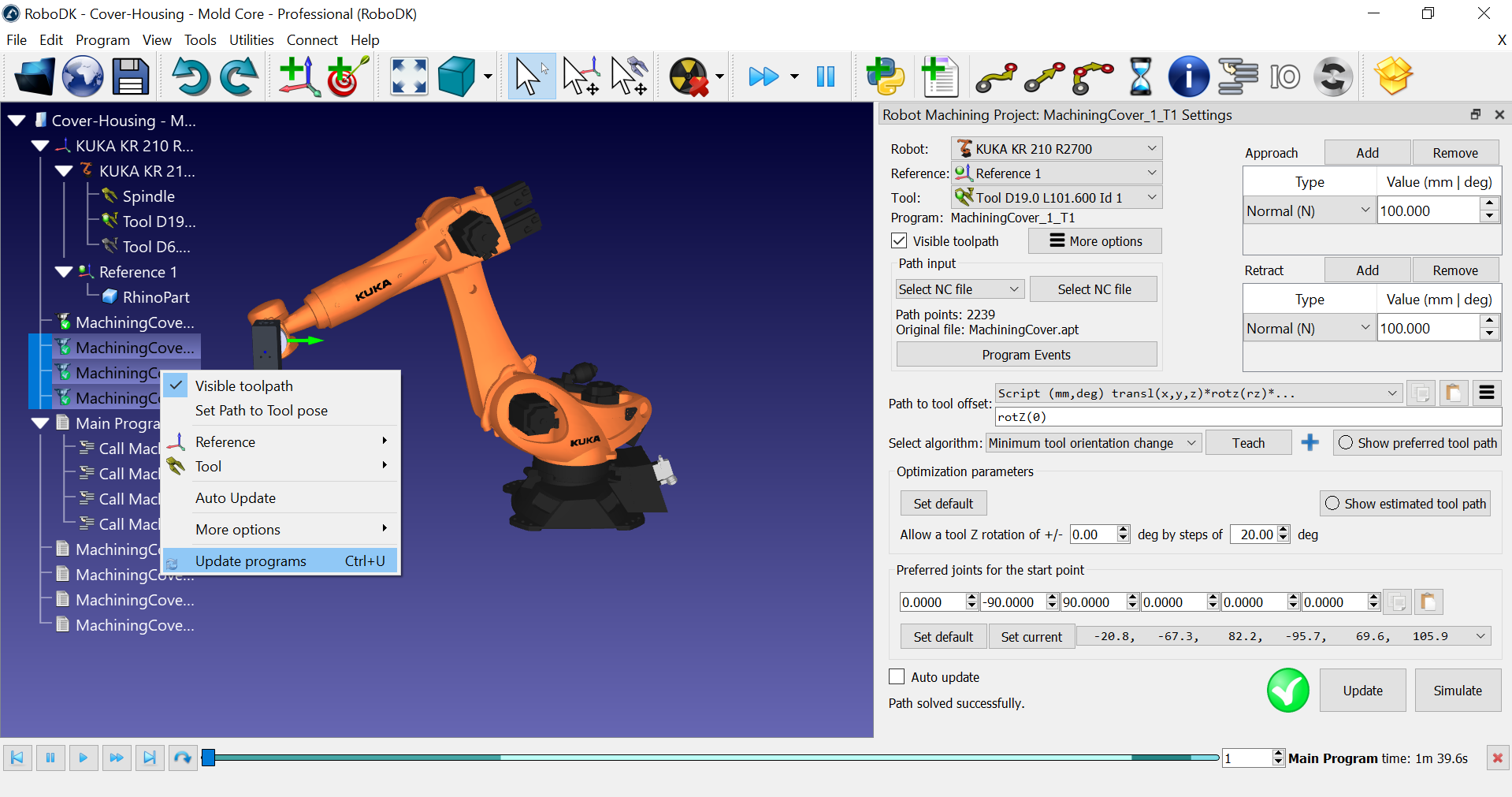
RoboDK가로봇가공경로를계산할때각가공작업에대해하나의새로봇프로그램을생성합니다. 흰색아이콘은로봇프로그램을나타냅니다. 이러한프로그램은 RoboDK에의해자동으로생성됩니다. 트리에서프로그램을두 번 클릭하여 각프로그램을개별적으로시뮬레이션할수있습니다.
RoboDK는모든로봇가공작업을순서대로시뮬레이션하기위해실행할수있는메인프로그램도자동으로생성합니다.