RhinoCAM
이섹션에서는 Mecsoft RhinoCAM 소프트웨어에서 RoboDK로가공작업을내보내는방법을보여줍니다. APT 파일은 RoboDK에서공구경로를로드하는데사용되며사용자지정 BAT 파일을사용하여자동으로전송됩니다.
RhinoCAM에서다음단계에따라가공작업을RoboDK로내보냅니다:
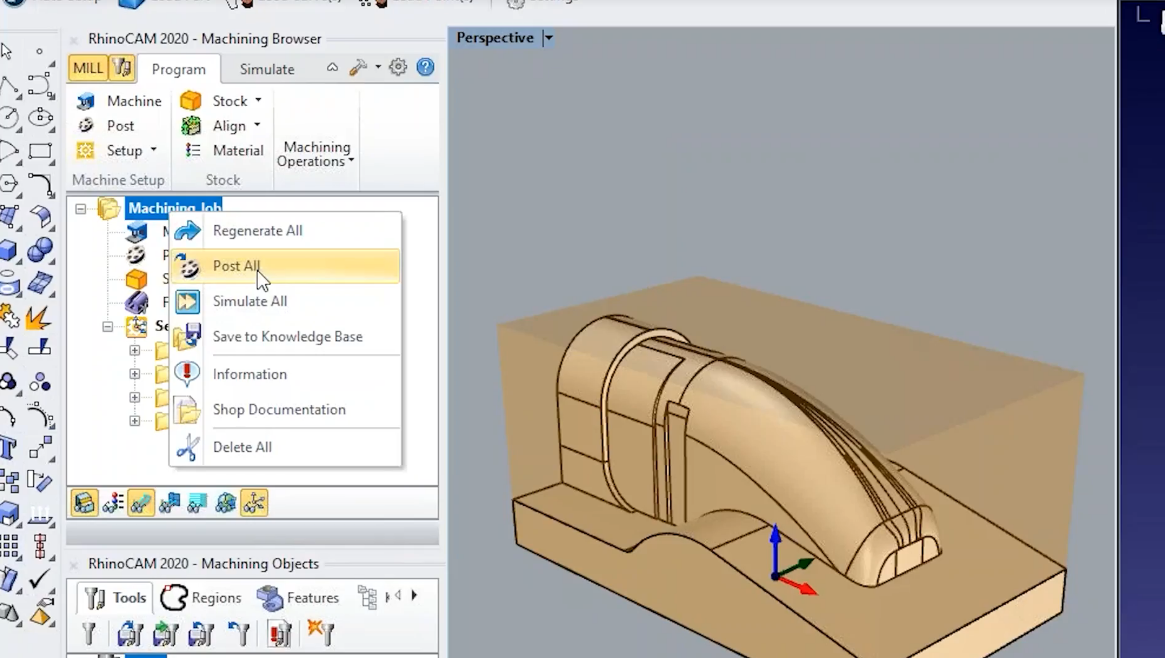
1.RhinoCAM에서가공작업프로젝트를마우스오른쪽버튼으로클릭합니다.
2.모두 게시를 선택하면가공프로그램이생성되고 RoboDK에모든것이자동으로로드됩니다.
로봇가공프로그램을CAM 소프트웨어에서생성한것과동일한 4개의가공작업으로 RoboDK가자동으로분할하는것을볼수있습니다.
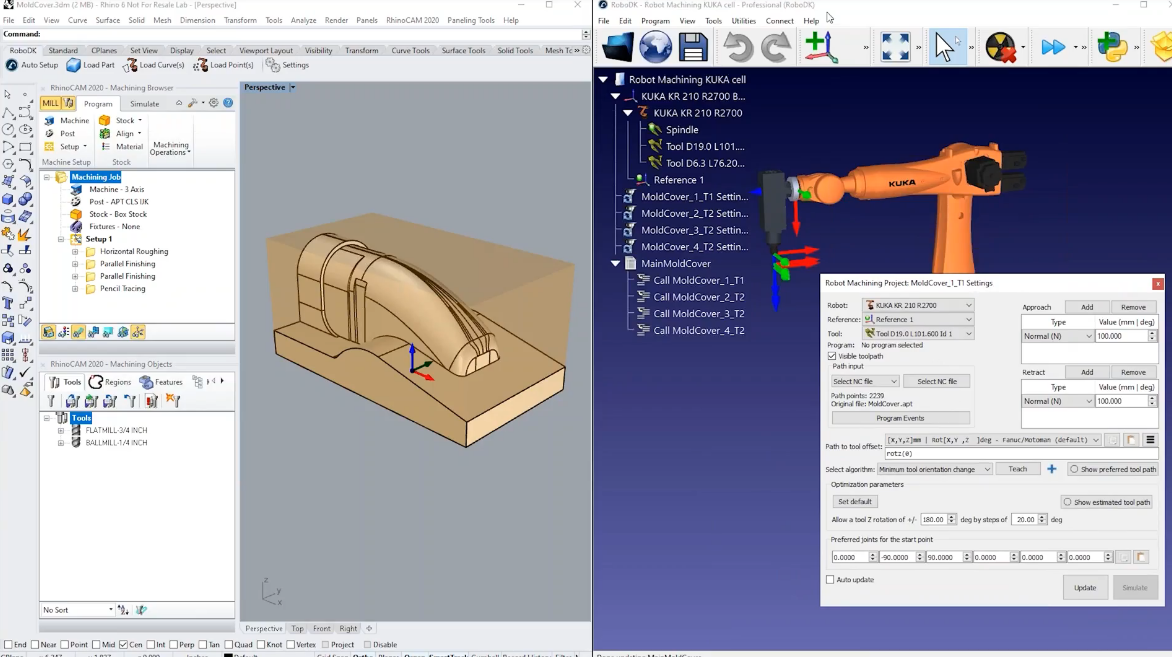
로봇가공프로젝트는사용자지정할수있는기본로봇셀을사용하여만들어집니다. 이예에서는 KUKA 로봇과기본스핀들을사용하며, 여기서공구(또는 TCP)는공구홀더를나타냅니다.
팁: 사용하는가공프로그램의이름은로봇용파일생성이완료되면컨트롤러에표시되는프로그램의이름이됩니다.
기본적으로 APT 프로그램을로드할때 RoboDK는가공프로젝트에서정의한도구를추가합니다. APT 파일을로드할때활성 TCP에도구가추가됩니다. 로봇가공프로젝트에서도올바른도구가미리선택됩니다.