도구
대부분의가공또는제조작업에는5축제약이수반됩니다. 공구(TCP)와절삭축의위치는정의되어있지만 6축로봇암을사용하면추가적인자유도를정의할수있습니다. 이자유도를통해절삭축을중심으로회전하고특이점과축제한을자동으로피할수있습니다.
공구방향을사용자지정하는가장쉬운방법은로봇가공프로젝트에서가르치기버튼을선택하는것입니다. 가르치기를 선택하면현재도구방향을따르려고 RoboDK에알려주므로설정이해당방향에맞게조정됩니다.
기본 도구 경로 표시를 선택하면로봇이따르려는도구방향을미리볼수있습니다.
팁: Alt 키를 누른상태에서로봇 도구를 잡으면도구방향을변경할수있습니다.
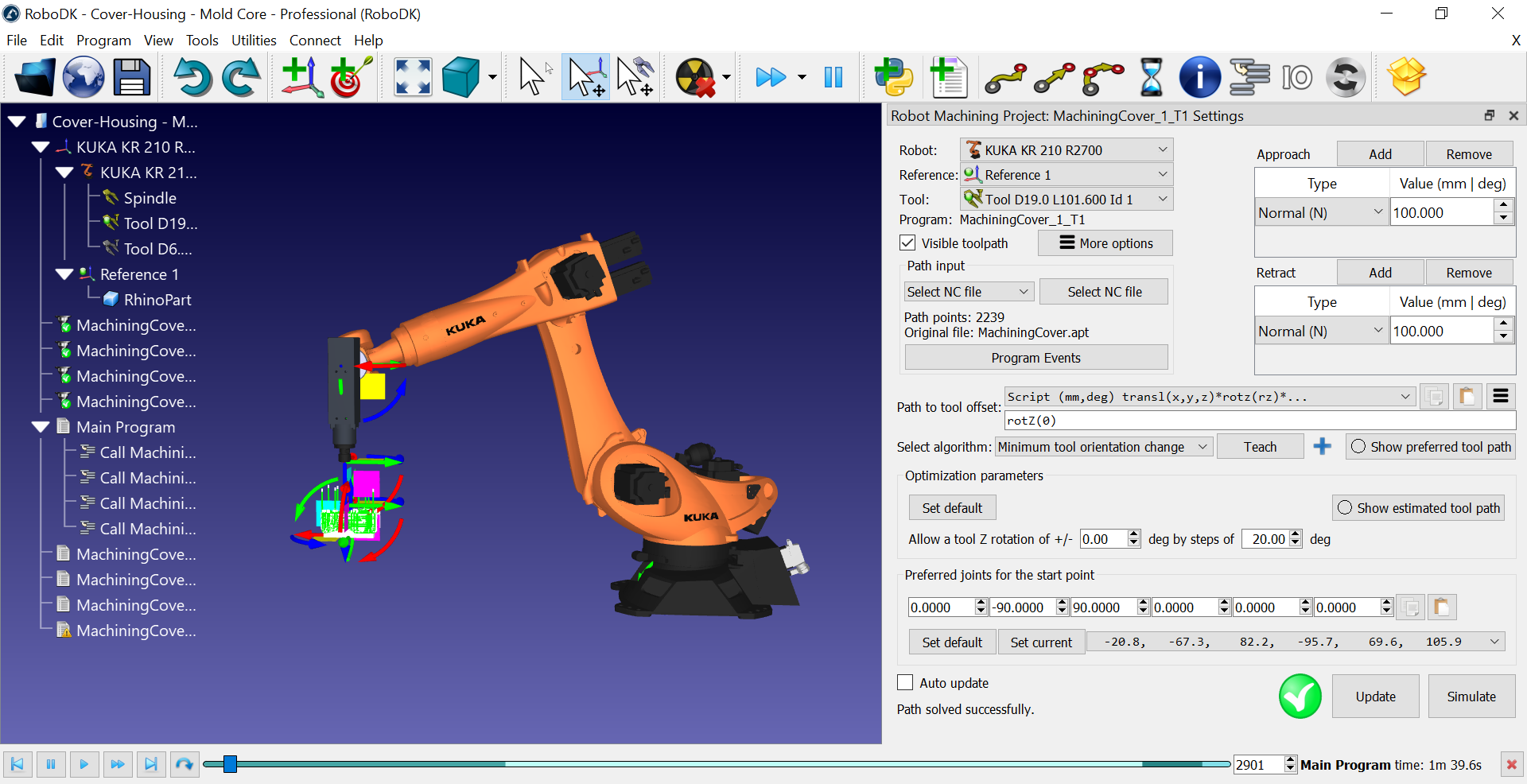
업데이트 및시뮬레이션을 선택하여결과를확인할수있습니다.
팁: 로봇을마우스오른쪽버튼으로클릭하고도구 방향 정렬을 선택하여좌표계에도구방향을정렬할수있습니다.
최적화매개변수를사용하면로봇이원하는방향을얻을수없는경우로봇이자동으로공구방향을변경할수있습니다. 이매개변수는큰부품이있거나특이점근처또는로봇작업공간의한계근처에서작업하는경우중요합니다. 빨간색표시가있으면로봇이작업을수행할수없다는뜻입니다.
예상 도구 경로 표시를 선택하면도달할수있는위치가녹색으로표시됩니다. 경로를실현할수있는방향에대한힌트를얻을수있습니다. 즉, 로봇특이점과축제한을자동으로피하기위해추가자유도를사용하고있습니다.
팁: 하나의로봇가공작업에대한설정을사용자지정한후에는해당작업에서바로설정 복사를 선택하고나머지작업을일괄선택한다음설정 붙여넣기를 선택할수있습니다. 그런다음업데이트를 선택하여로봇가공프로그램을다시계산할수있습니다.