마스터캠
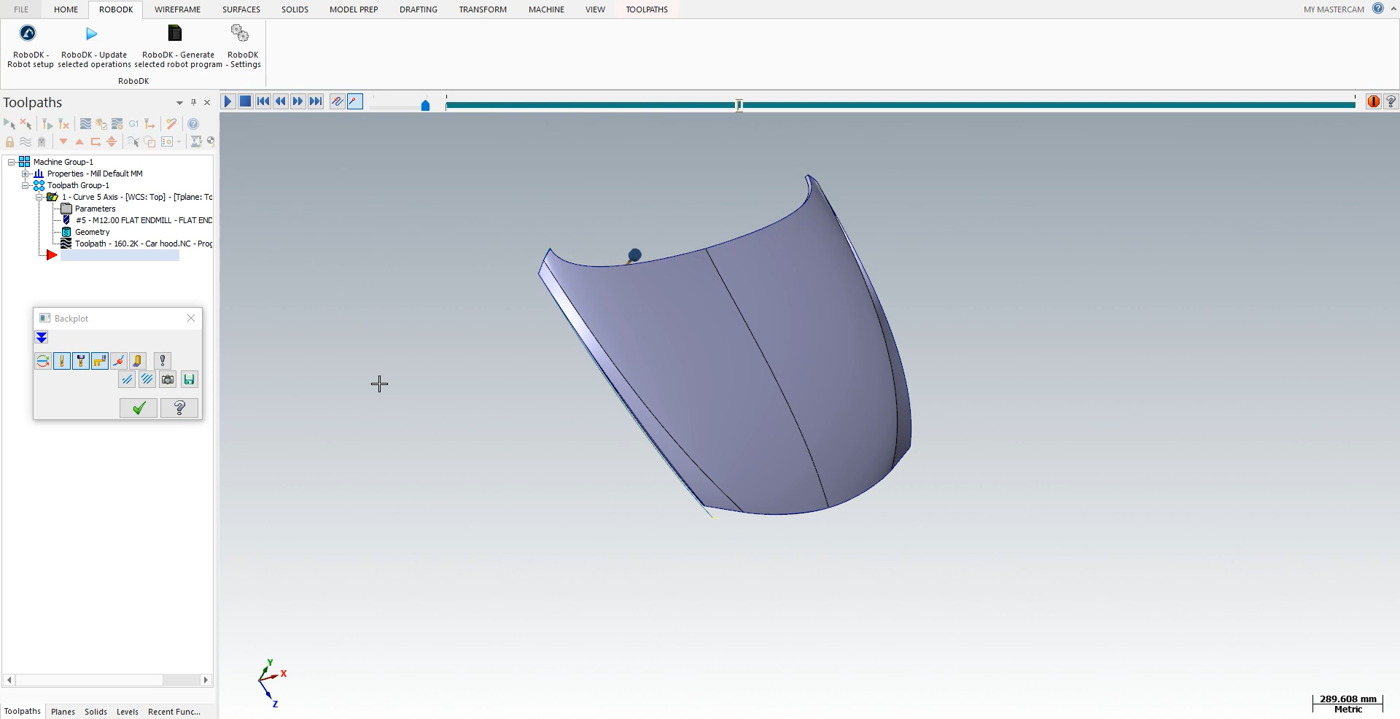
마스터캠에서 3D 개체를열고절단시뮬레이션을시작합니다. 소프트웨어가절단면에맞게공구의방향을조정한것을볼수있습니다
다음단계에따라 RoboDK에파트를로드합니다:
1.RoboDK 탭을선택하고RoboDK - 로봇 설정을 선택합니다.
2.부품 로드를 선택합니다.
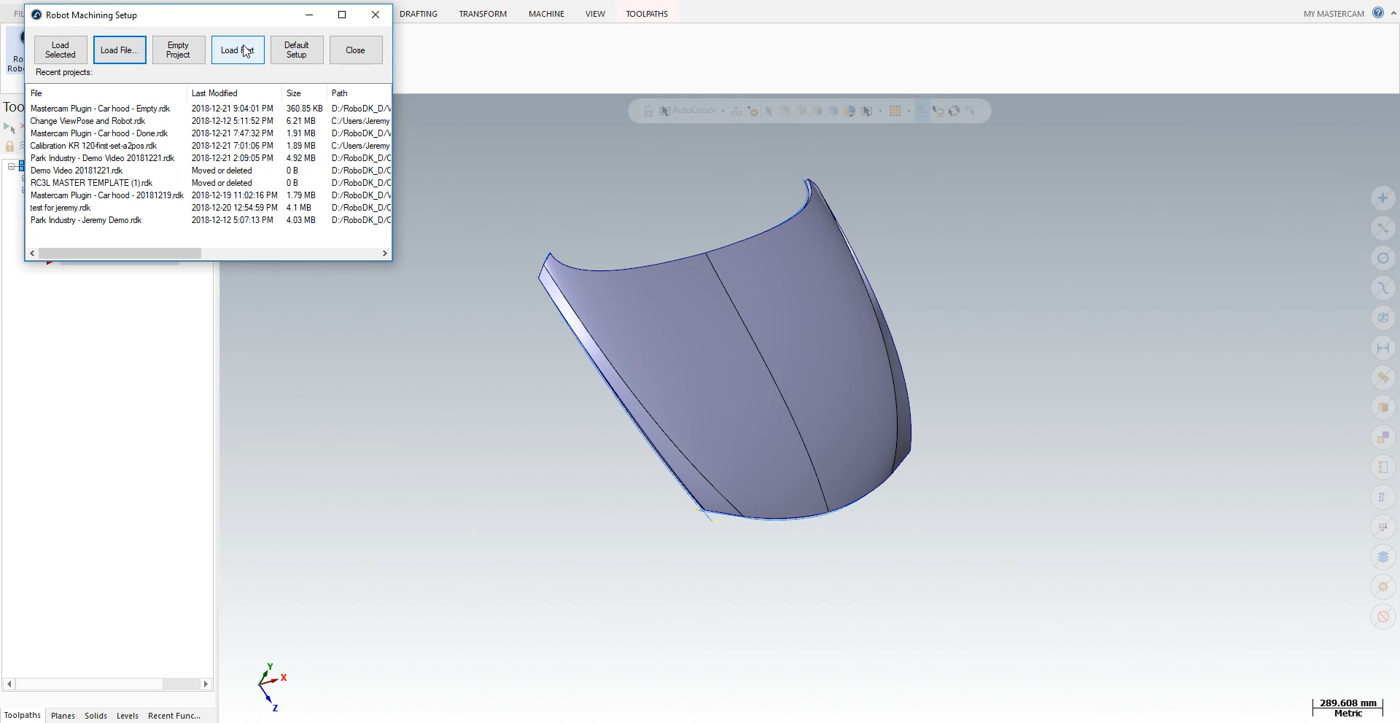
RoboDK 스테이션의지그에활성기준프레임(가공기준)에로드된파트가표시되어야합니다.
참고: 파트를올바른위치로가져오려면특정위치에가공 참조를 설정해야합니다. 가공 참조➔ 표시를 마우스오른쪽버튼으로클릭하면프레임이표시됩니다. 파트를만들때마스터캠에서이정확한위치에원점을설정합니다. 부품을가져오면 RoboDK가부품의원점을가공참조의원점과일치시킵니다.
다음단계는마스터캠에서 RoboDK로커팅경로를가져오는것입니다.
1.마스터캠에서RoboDK 탭을선택합니다.
2.RoboDK 선택- 선택한 작업을 업데이트합니다.
3.RoboDK로이동합니다.