로봇
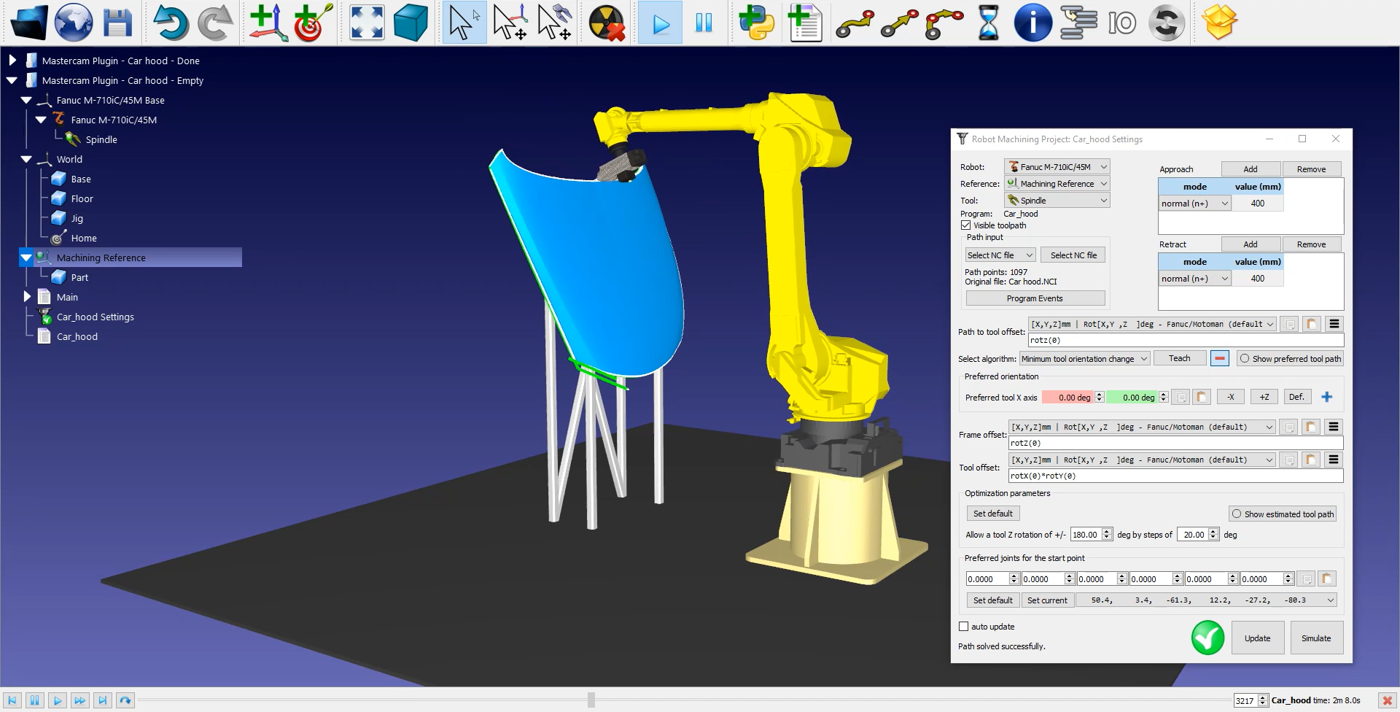
로봇절삭경로를 RoboDK에서가져온후로봇스테이션의금형참조에연결된절삭공구경로를볼수있습니다. 
절단경로전후의접근및후퇴동작값을조정할수도있습니다. 이예에서는400mm 접근/후퇴가안전할것입니다. 이제이러한움직임은기본접근/후퇴보다4배더길어져파트와의충돌을피하는데도움이됩니다.
메뉴하단에서파트의방향을조정할수도있습니다.
다음단계는
참고: 스페이스바를길게누르거나메뉴의
참고: 프로그램이벤트버튼을사용하여스핀들회전과같은 I/O를활성화또는비활성화할수도있습니다.
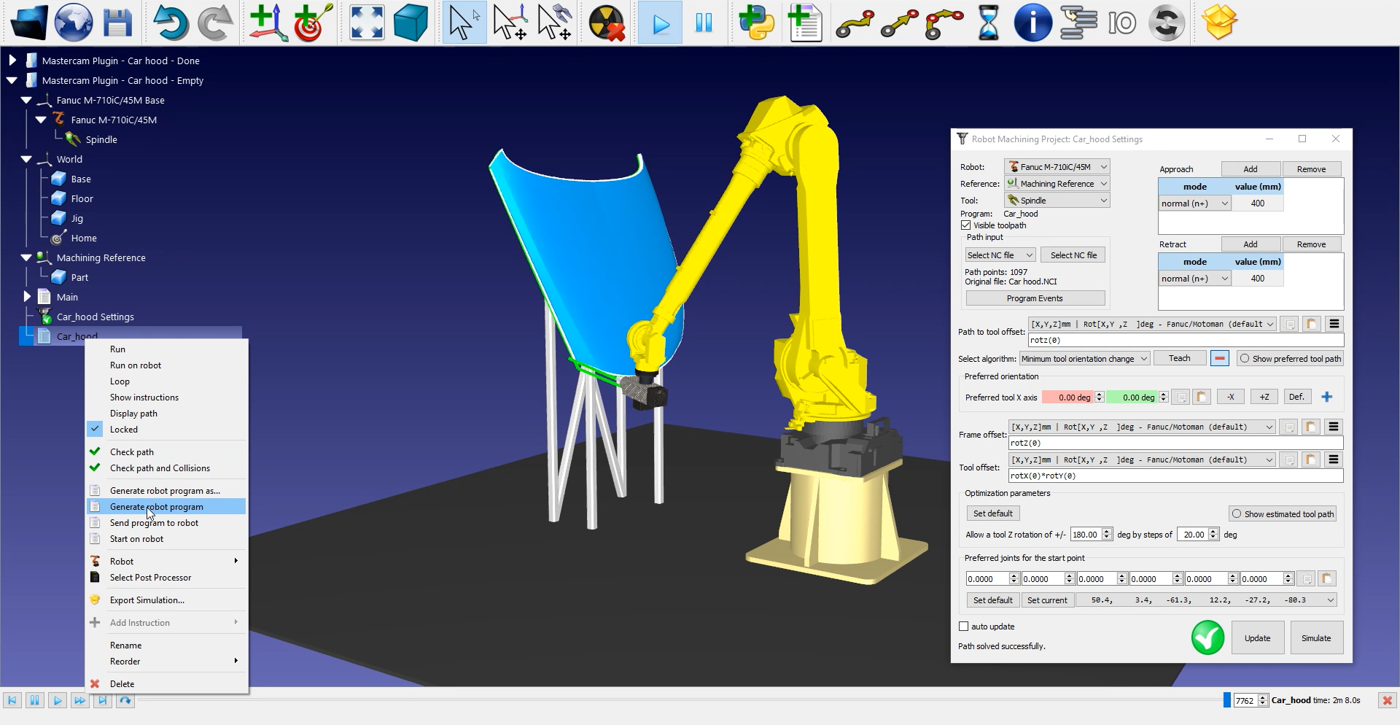
로봇프로그램을생성하려면올바른포스트프로세서를사용해야합니다. 
마지막으로
이제Fanuc LS 및/또는 TP 파일을로봇컨트롤러로전송할준비가되었습니다.