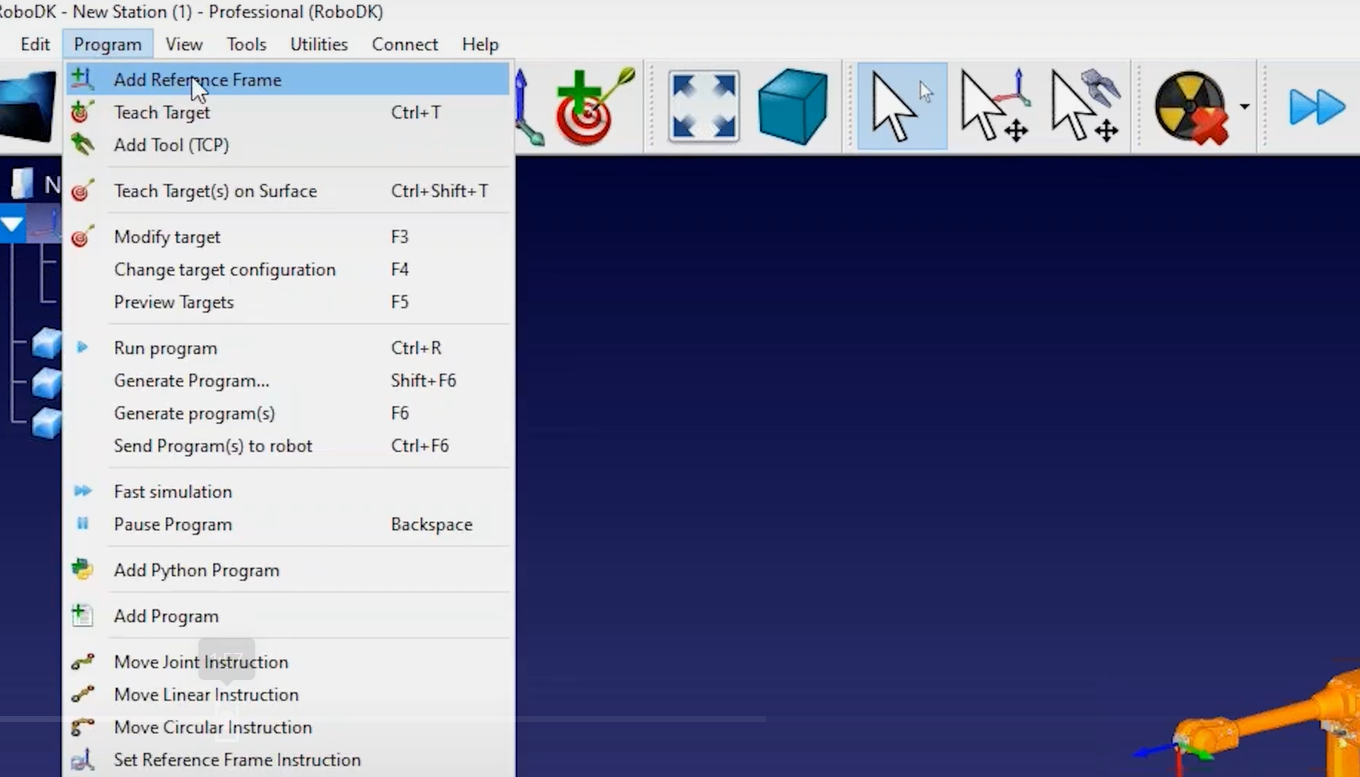
로봇
프로그램 메뉴를선택한다음기준 프레임 추가를 선택하여로봇가공픽스처에대한새좌표계를만들수있습니다.
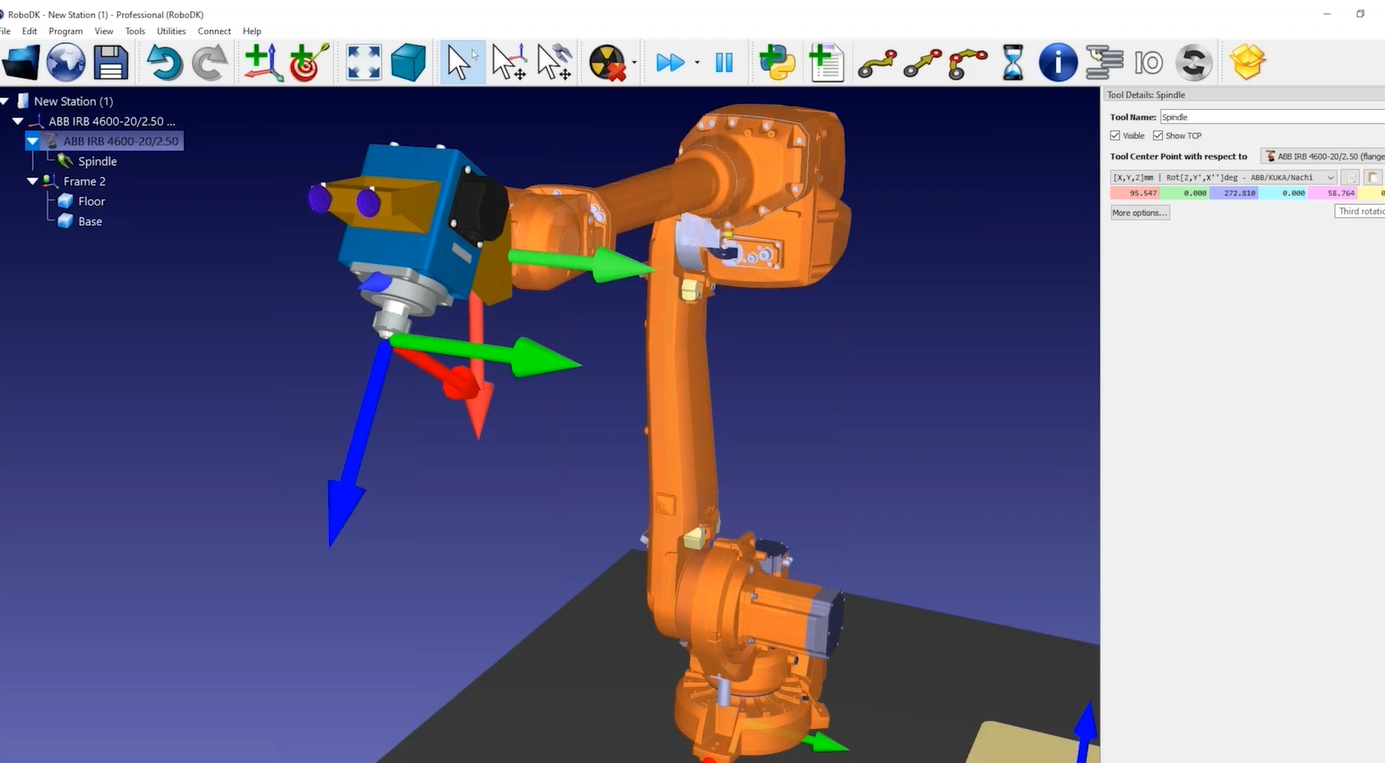
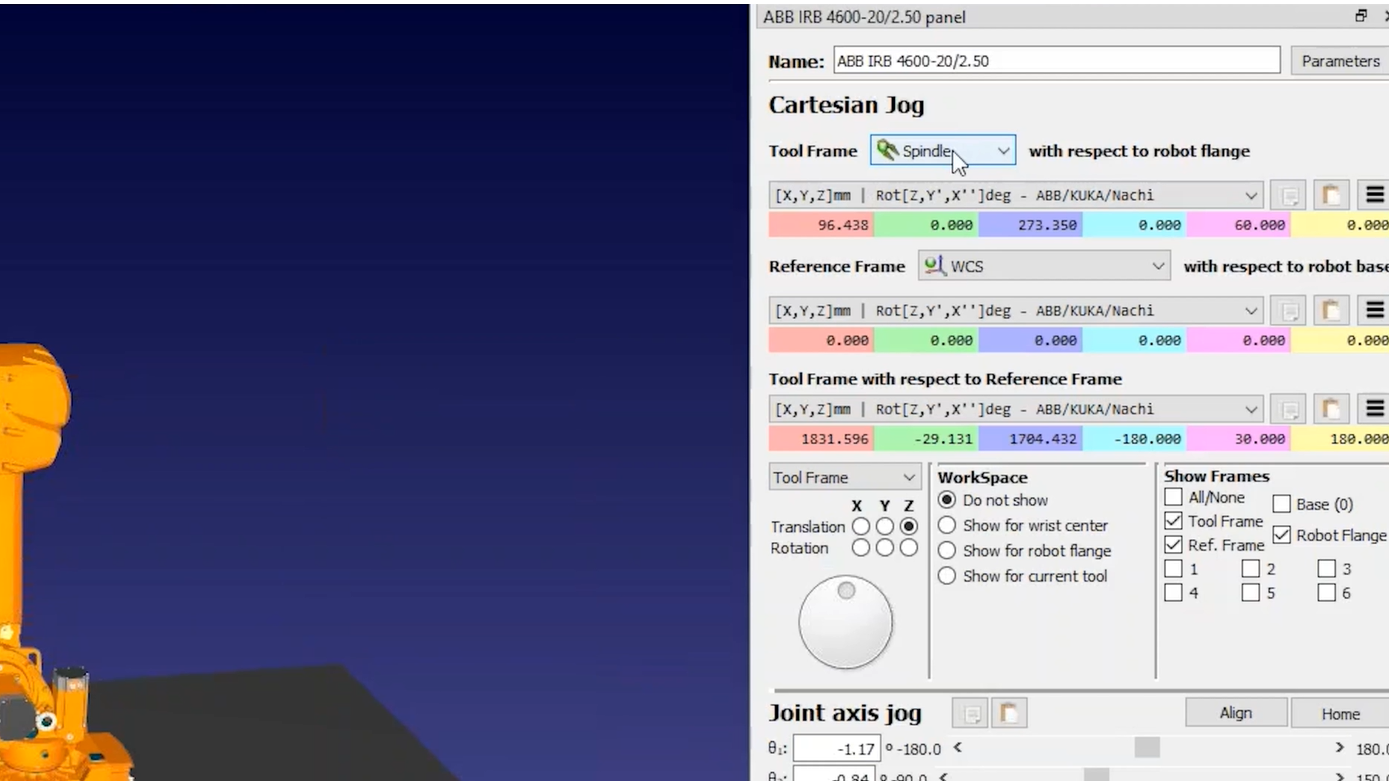
다음단계에따라도구(TCP)를올바르게정의하세요:
1.도구좌표가있는경우도구의좌표를입력할수있습니다(다양한공급업체별방향형식중에서선택하여도구포즈를입력할수있습니다).
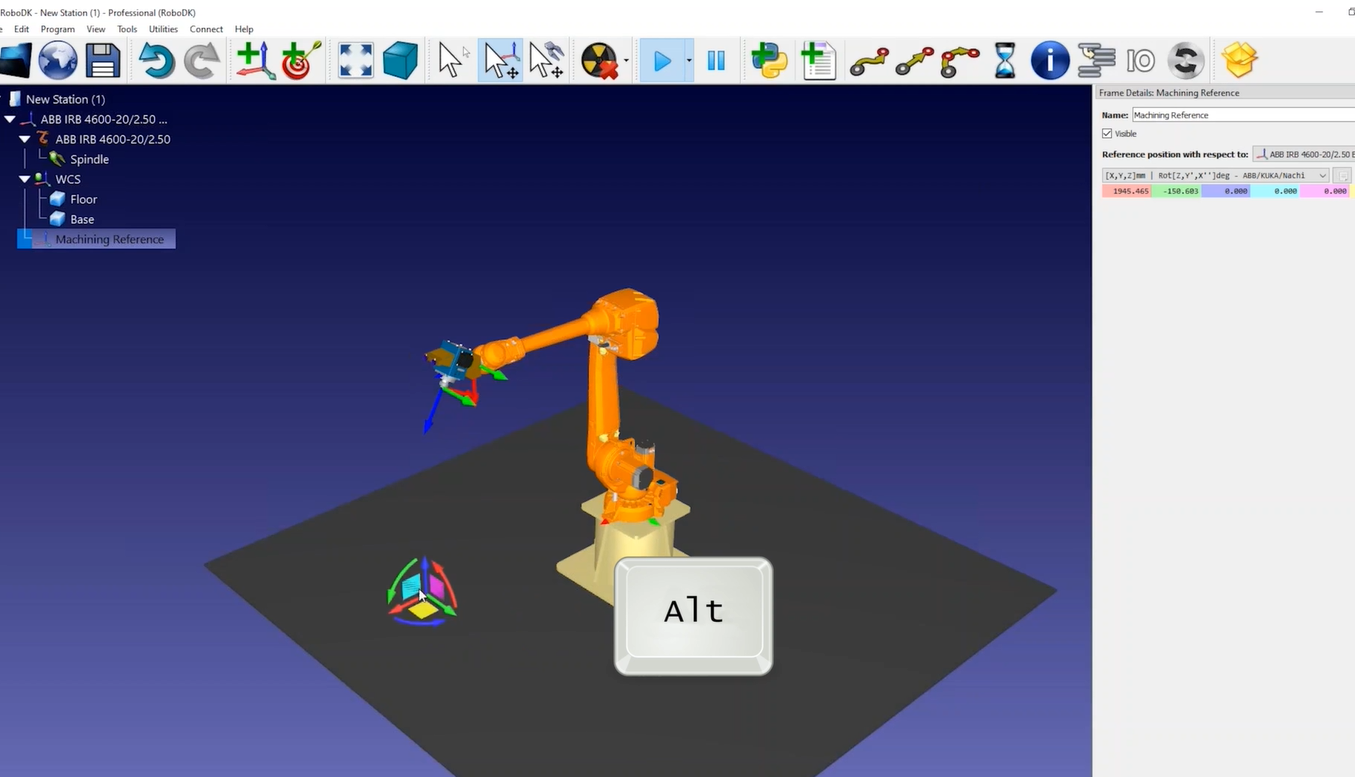
2.Alt 키를 누른채로로봇이나좌표계를이동할수있습니다.
3.Alt 키와Shift 키를누른채로 TCP의위치와방향을수정할수있습니다.
가공참조를나타내는다른좌표계를추가하려면다음단계를따르세요:
4.프로그램 메뉴를선택한다음참조 프레임 추가를 선택합니다.
5.F2 키를누르거나마우스오른쪽버튼을클릭하고이름 바꾸기를 선택하여트리에서항목의이름을바꿀수있습니다.
6.부품을배치할위치를선택할수있는경우Alt 키를누른채로좌표계를원하는위치로이동할수있습니다
7.로봇을더블클릭하여사용중인도구와좌표계를확인할수있습니다. 로봇의특정위치에대해로봇패널에표시되는값은로봇컨트롤러에표시되는값과일치해야합니다.
로봇셀을저장하려면다음단계를따르세요:
8.로봇셀을빌드한후에는파일➔ 저장 스테이션을 선택하여하나의 RDK 파일로저장할수있습니다. 이렇게하면 3D 모델을포함한모든설정이하나의파일로저장됩니다.
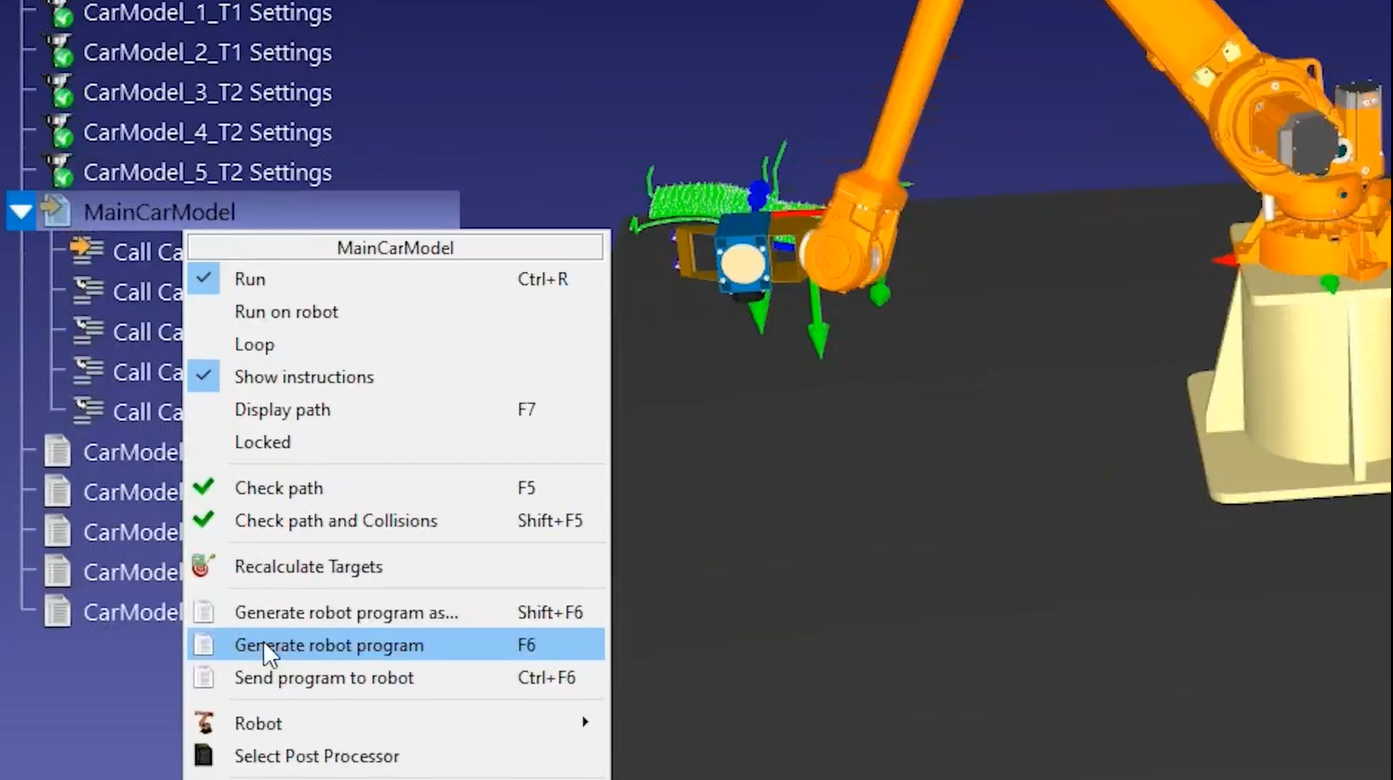
9.RoboDK에서가공작업파일을로드하면각가공작업에대해로봇가공프로젝트가자동으로하나씩생성됩니다.
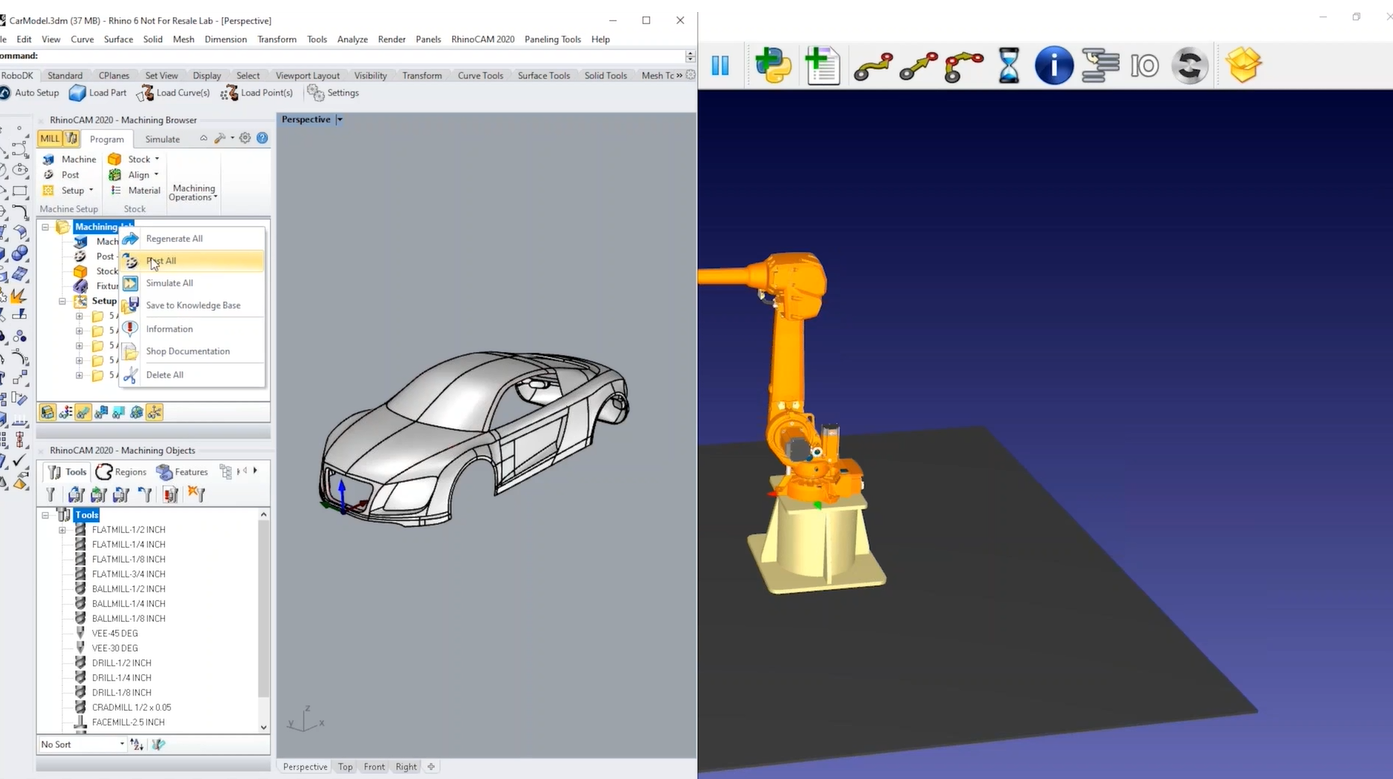
10.업데이트를 선택하여 RoboDK가기본설정을사용하여실행가능한경로를찾을수있는지확인할수있습니다. 모든작업을일괄업데이트할수도있습니다.
11.RoboDK에서유효한시뮬레이션이생성되면프로그램을마우스오른쪽버튼으로클릭하고프로그램 생성을 선택할수있습니다. 그러면로봇컨트롤러에필요한파일이생성됩니다.