로봇
로봇가공작업간에보다안전하게전환하려면각가공작업후로봇이접근위치로이동하도록설정하면됩니다.
다음단계에따라 GoHome이라는새프로그램을만들고가공작업이완료된후이위치로이동합니다:
1.프로그램➔ 프로그램 추가를 선택하거나도구모음에서해당버튼을선택하여새프로그램을만듭니다.
2.F2 키를눌러프로그램이름을GoHome과 같은이름으로바꿉니다.
3.방금만든프로그램을선택합니다.
4.로봇을안전한위치로이동하고프로그램➔ 조인트 명령 이동을 선택하거나도구모음에서해당버튼을선택합니다. 이작업은해당위치에새대상을생성하고이전에프로그램을선택한경우해당대상에조인트이동명령을추가합니다.
팁: 팁: 시작하기 섹션에서 타겟및프로그램을만드는방법에대해자세히알아보세요.
5.그런다음첫번째프로그램호출명령을마우스오른쪽버튼으로클릭하고명령 추가➔ 프로그램 호출 명령을 선택하여각가공작업사이에로봇이이홈타겟으로이동하도록할수있습니다.
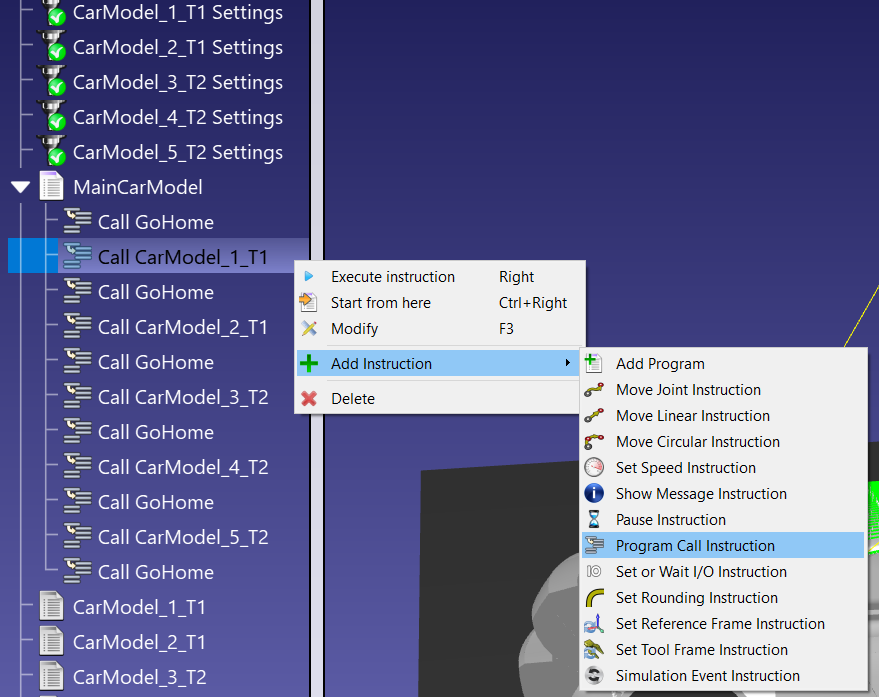
6.이동하려는프로그램이름(GoHome)을입력하고확인을선택합니다.
팁: 지침을추가할수없는경우탈출을 선택하여프로그램시뮬레이션을중지하세요.
7.그런다음프로그램내에서이지침을복사/붙여넣어 최종결과를빠르게얻을수있습니다.
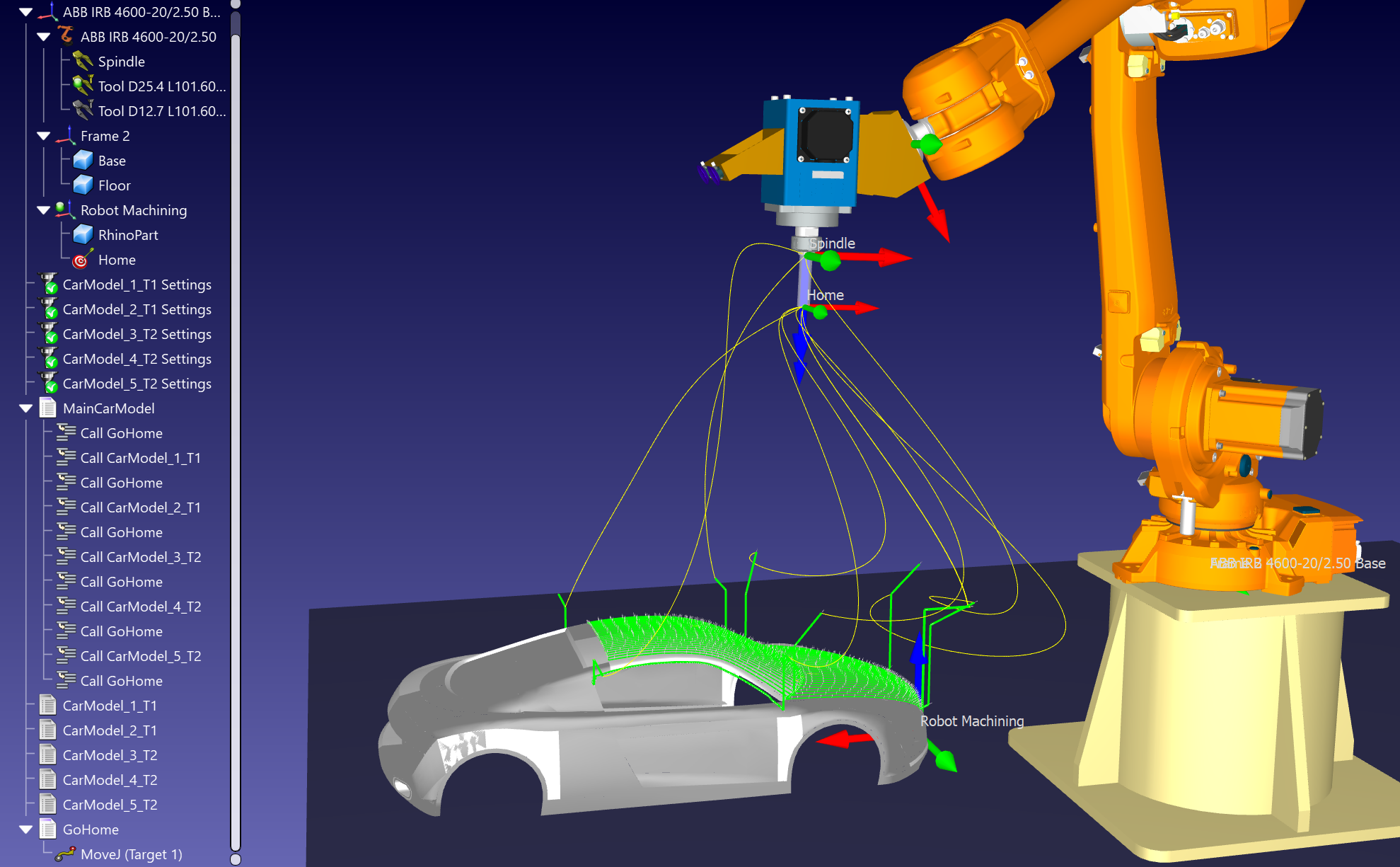
8.메인프로그램을마우스오른쪽버튼으로클릭하고경로 표시를 선택하면로봇도구경로가노란색선으로표시됩니다. 이렇게하면접근대상의위치가프로젝트에적합한지시각화하는데도움이됩니다.