RoboDK
다음단계는
경로섹션의순서를바꾸거나감각을전환하려면다음단계를따르세요:
1.
2.스테이션의빈섹션을마우스오른쪽버튼으로클릭하고선택 재설정을
3.경로의시작지점으로이동하여첫 번째 섹션을 선택합니다. 마우스오른쪽버튼으로클릭하여올바른방향을가리키고있는지확인하고필요한경우감각 전환을 누릅니다.
4.다음 커브 자동 선택 또는모두 자동 선택을 선택하여경로의모든섹션을올바른순서로자동으로선택합니다.
5.완료를 선택합니다. 그러면 RoboDK 설정창으로돌아갑니다.
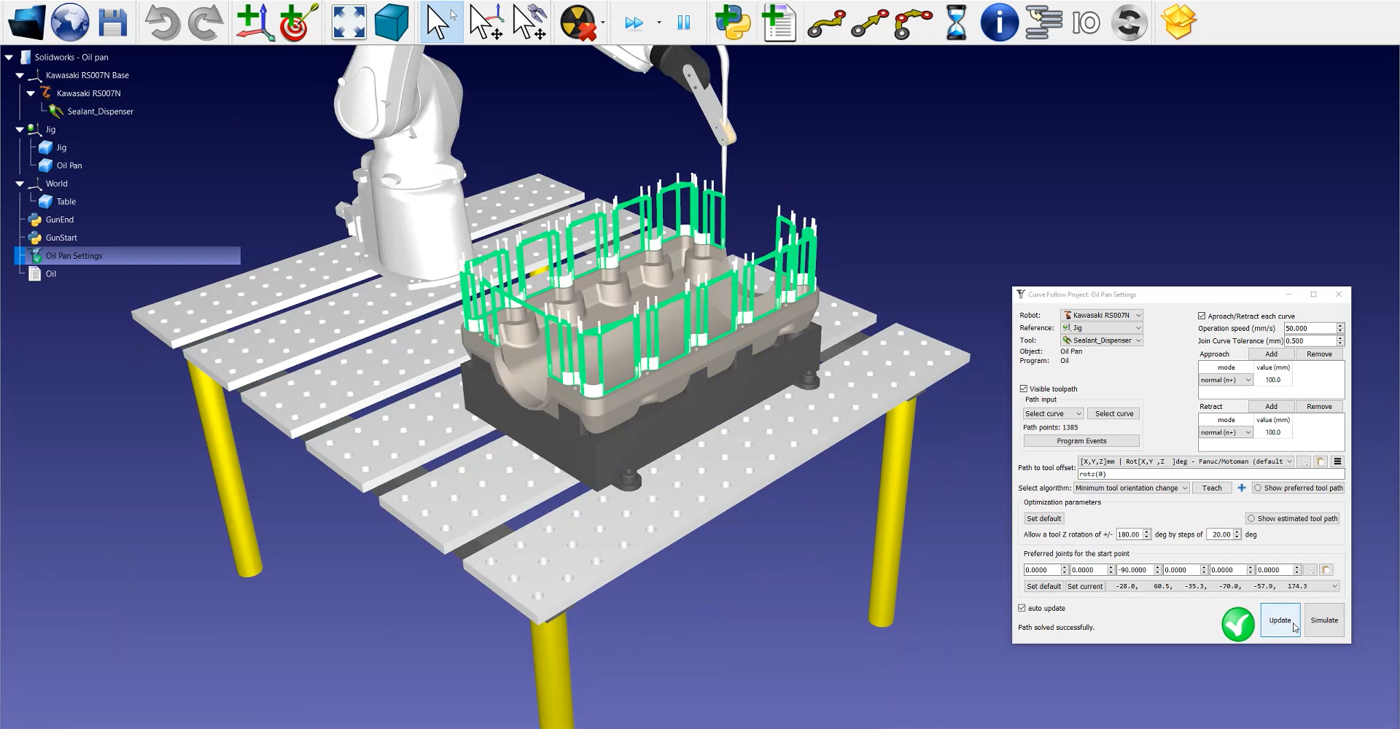
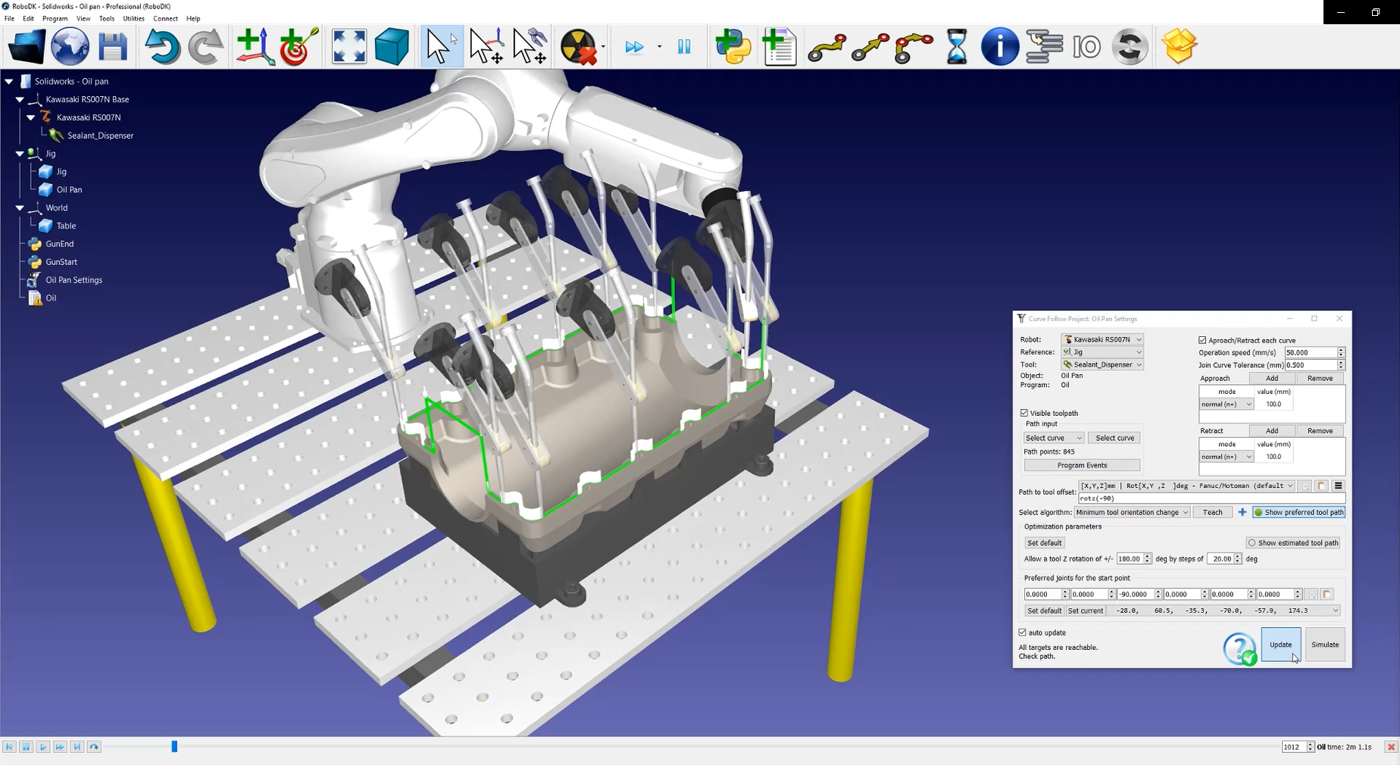
다음으로도구의방향을조정해야합니다:
1.기본 설정 도구 경로 표시를 선택하면아래이미지와같이경로를따라도구를시각화할수있습니다.
2.로츠 값을수정합니다.이예에서는 -90도가설정되어있습니다.
3.업데이트➔ 시뮬레이션을 선택합니다.
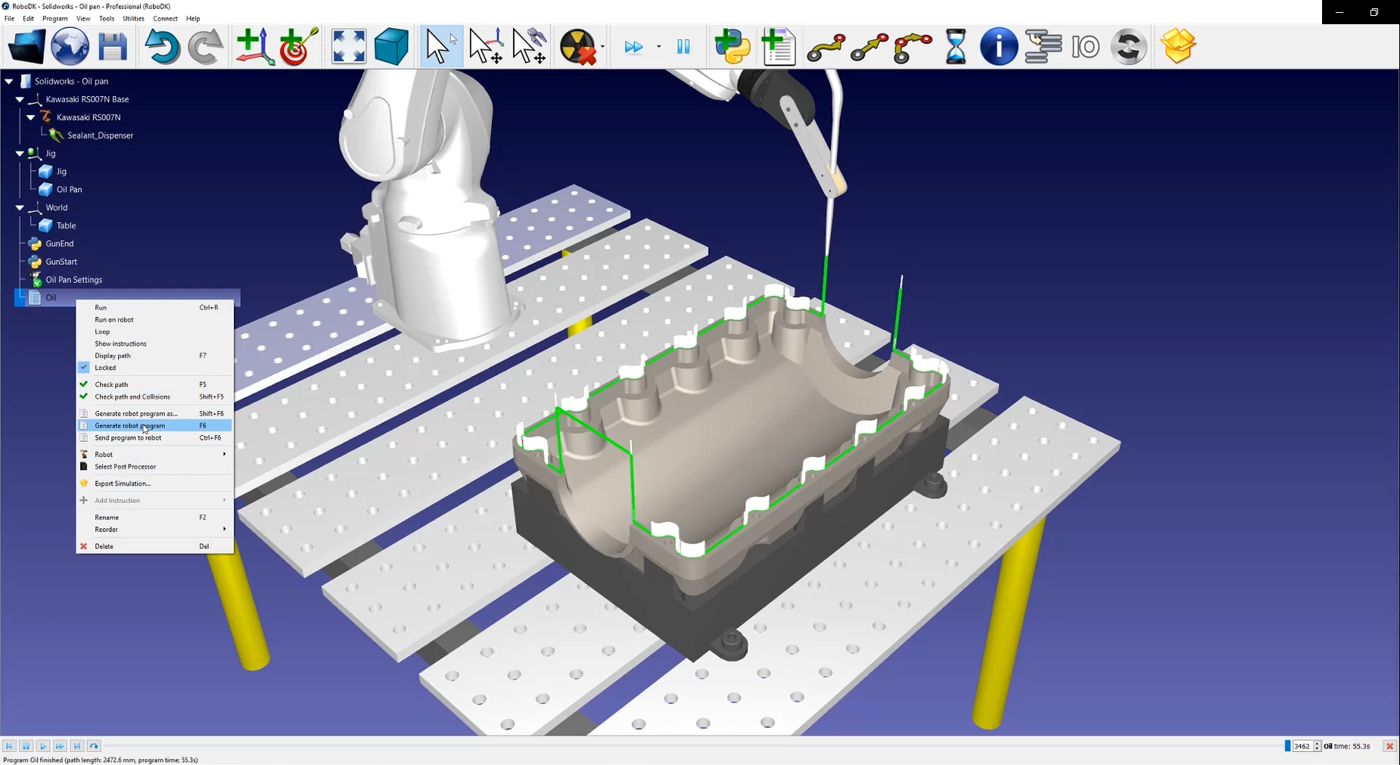
로봇프로그램을생성하려면
이제 .pg 파일을로봇컨트롤러로전송할준비가되었습니다.