Laser Cutting
소개
이섹션에서는로봇시뮬레이션및오프라인프로그래밍을위해 RoboDK에서기본프로젝트를만드는데도움이됩니다. 이예제에서는Fusion 360과 RoboDK를사용하여레이저절단애플리케이션을위해모토만로봇을시뮬레이션하고프로그래밍합니다.
두가지방법중에서선택할수있습니다: 하나는특징추출방법을사용하는방법이고다른하나는 Fusion 360의레이저커팅특징을사용하는방법입니다.
Fusion 360용 RoboDK 플러그인을사용하면Fusion 360에서생성한 3D 모델을 RoboDK로쉽게로드할수있습니다. 이플러그인을사용하면 50개이상의다양한로봇제조업체와 500개이상의로봇을Autodesk Fusion 360에서직접프로그래밍할수있습니다.
RoboDK 라이선스가있는경우 Fusion 360용 RoboDK 플러그인은무료입니다.
레이저 커팅 예시
프로젝트를시작하려면먼저기본라이브러리에서 RoboDK의레이저커팅예제를선택해야합니다.
설정
이예제에서는모토만MH50-35 로봇, 레이저커팅헤드, 스탬프가찍힌금속조각, 레이저커팅테이블을사용합니다.
스테이션을로드합니다:
1.파일 선택➔
2.RoboDK의예제섹션에서레이저 커팅 예제를찾습니다:
C:/RoboDK/예제/플러그인-퓨전-360-레이저-컷팅.rdk.
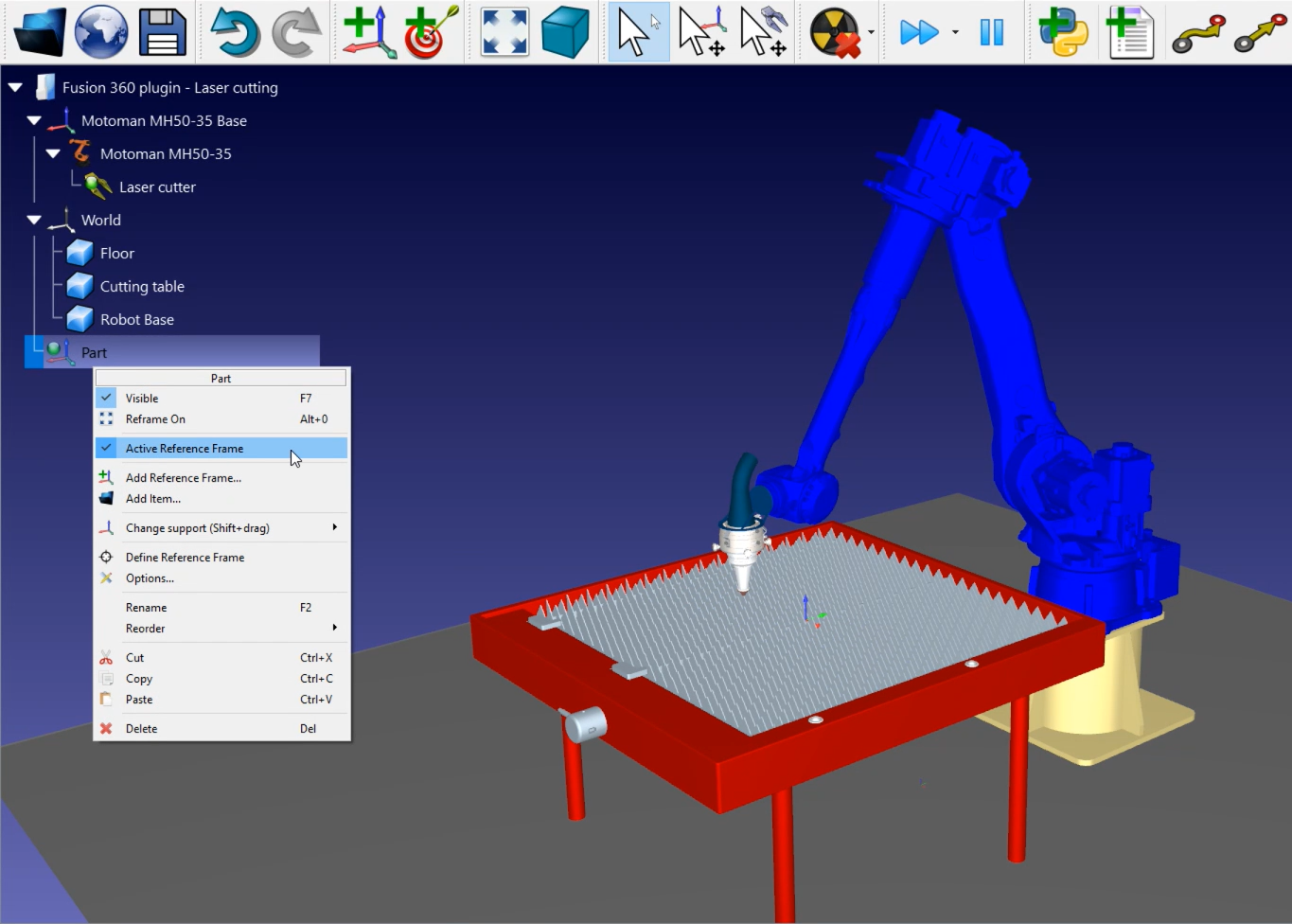
표중앙에있는 "파트"라는
이제스테이션을로드했으므로Fusion 360을열수있습니다.
방법 1: 특징 추출
Fusion 360에서3D 개체를엽니다. 이예제에서3D 개체는스탬프가찍힌금속조각입니다
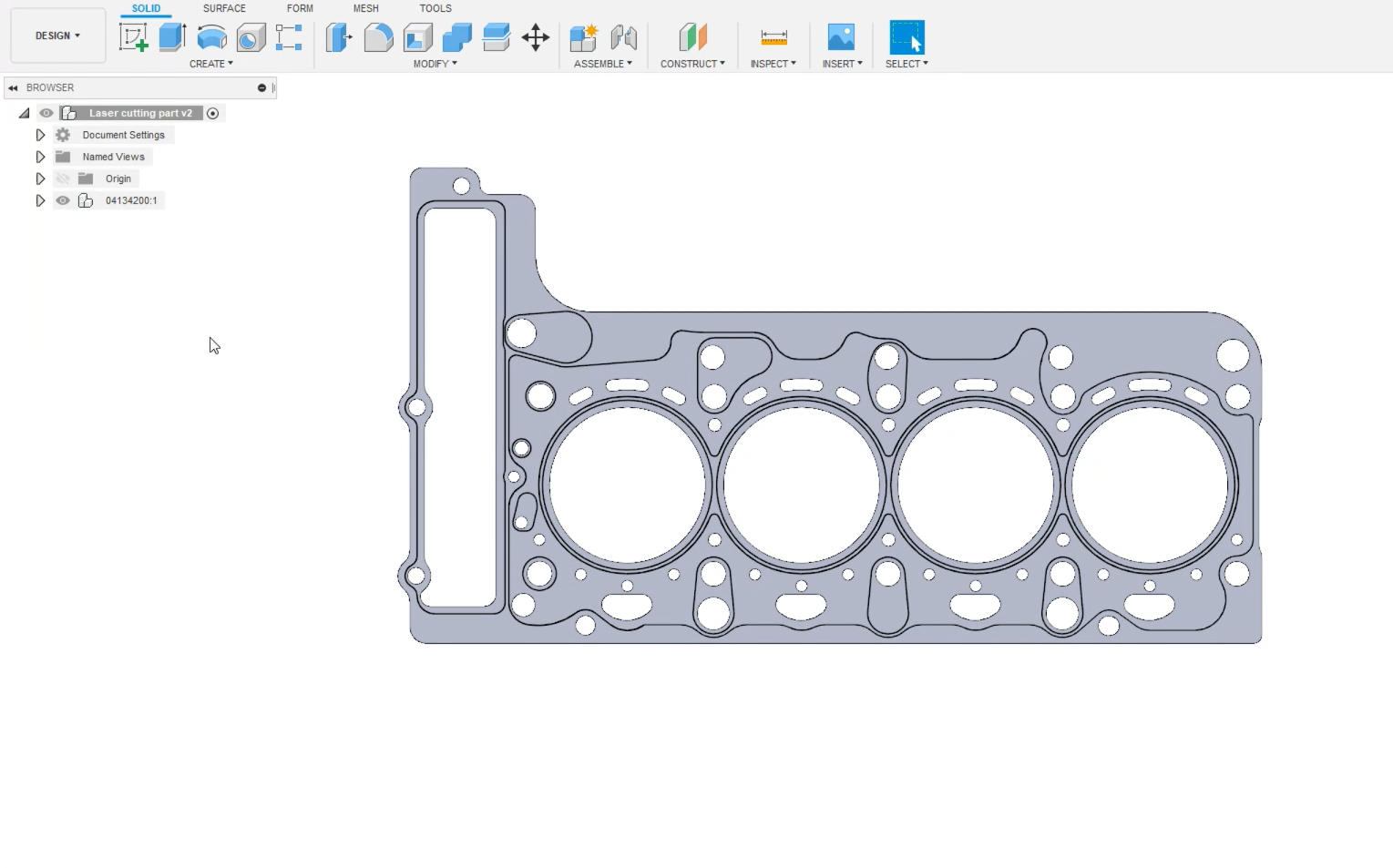
이프로젝트의목표는리스커터로구멍을뚫는로봇프로그램을자동으로만드는것입니다. 수작업으로프로그래밍하면시간이너무오래걸립니다.
1.왼쪽상단에서 Fusion의디자인 섹션을선택합니다.
2.도구 탭을선택합니다. 여기에서 RoboDK 플러그인을찾을수있습니다.
3.
파트가 RoboDK 스테이션의활성참조프레임으로임포트되었습니다. 파트가올바른방향으로임포트되었는지확인합니다. 이예제에서는파트의방향을수정해야합니다.
다음단계에따라파트의방향을수정합니다:
1.
2.열린메뉴에서추가 옵션을 클릭합니다.
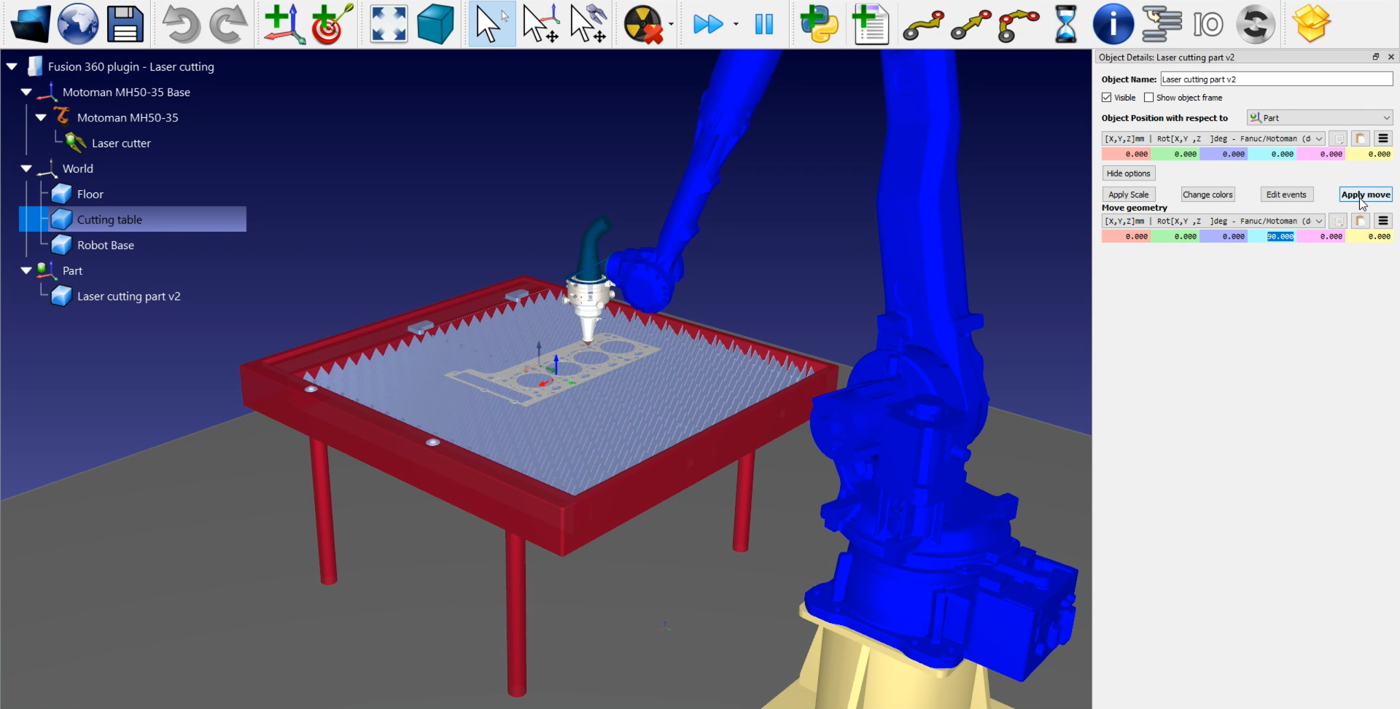
3.지오메트리 이동으로 이동하여위이미지와같이 X축(하늘색)에 90을입력합니다.
4.이동 클릭하여오리엔테이션을저장합니다.
RoboDK 플러그인에는 Fusion 360의또다른기능이있어절단경로를 RoboDK로가져오는데도움이됩니다.
1.Fusion 360으로돌아갑니다.
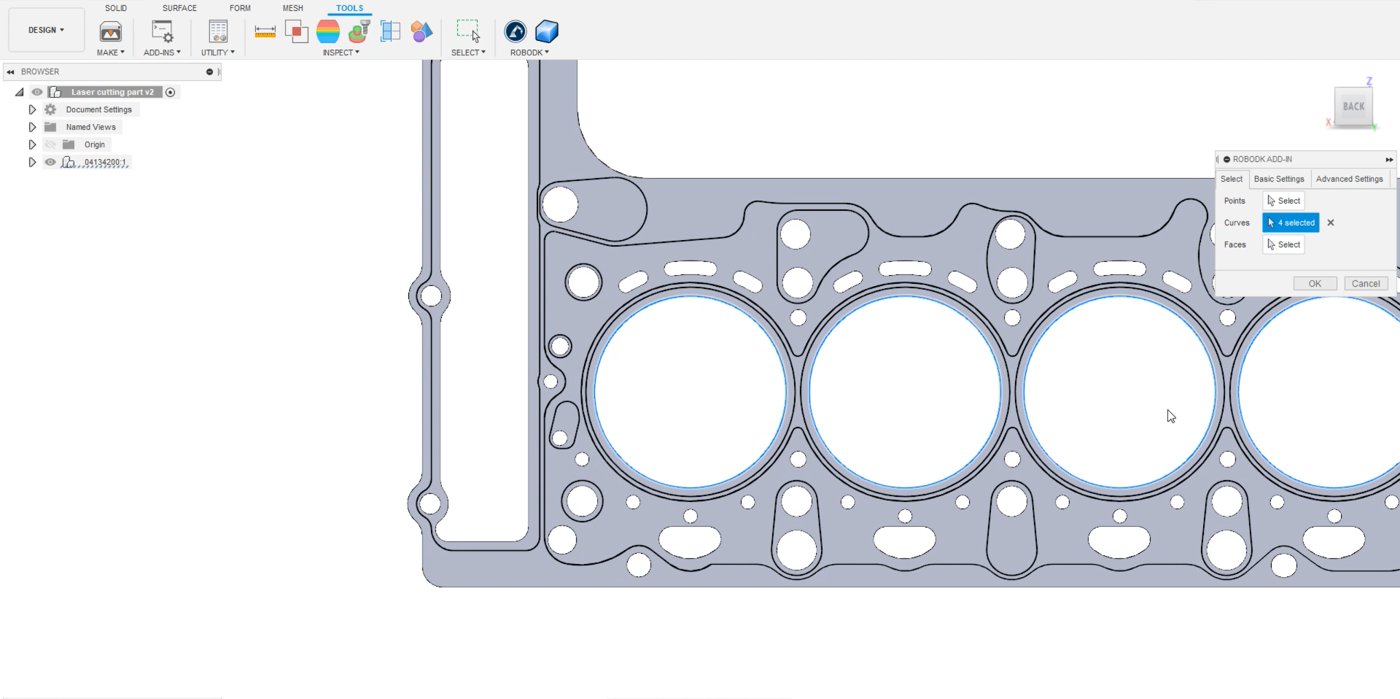
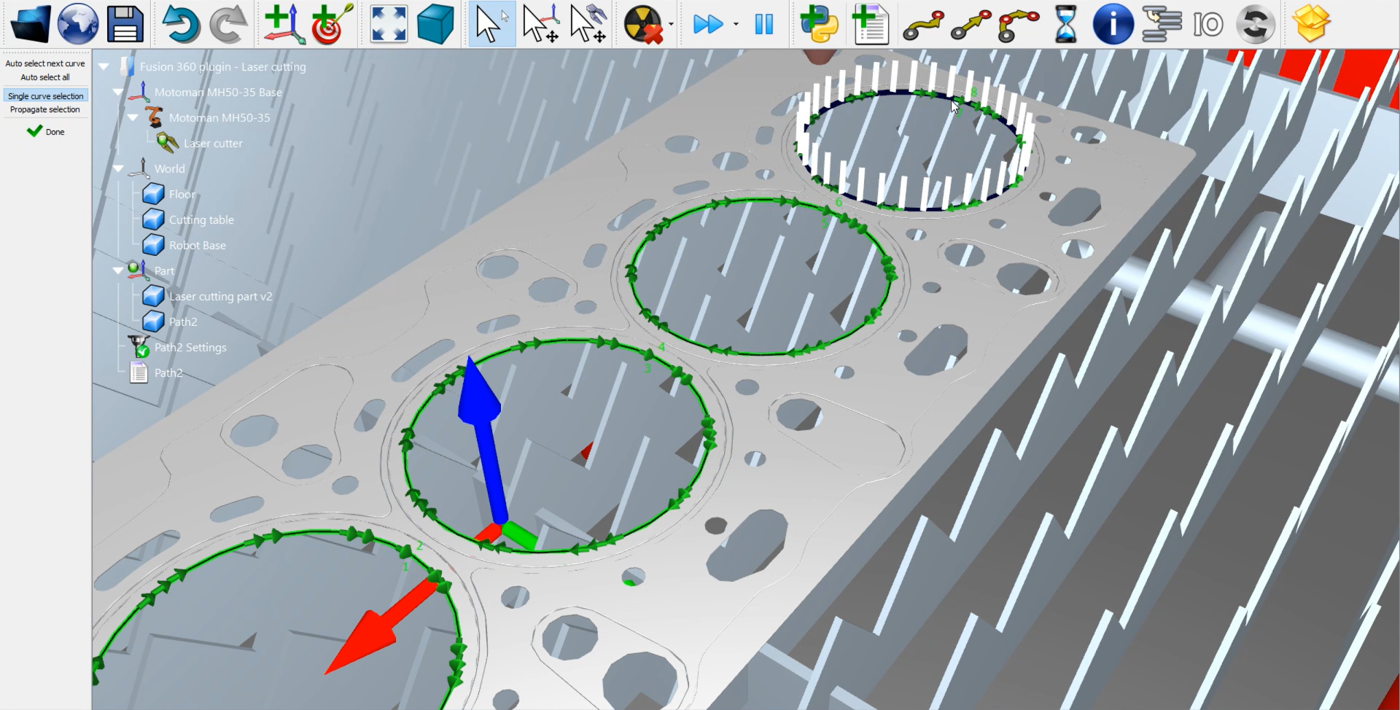
2.RoboDK 플러그인메뉴에서커브 로드를 선택합니다.
3.열린메뉴에서커브를 선택합니다.
4.아래이미지와같이네개의큰원의가장자리를선택합니다.
이제로봇도구에대한오리엔테이션을 RoboDK에제공해야합니다.
1.열린메뉴에서얼굴을 선택합니다.
2.아래이미지와같이도구를일반화할얼굴을선택합니다.
이제설정을구성할수있습니다:
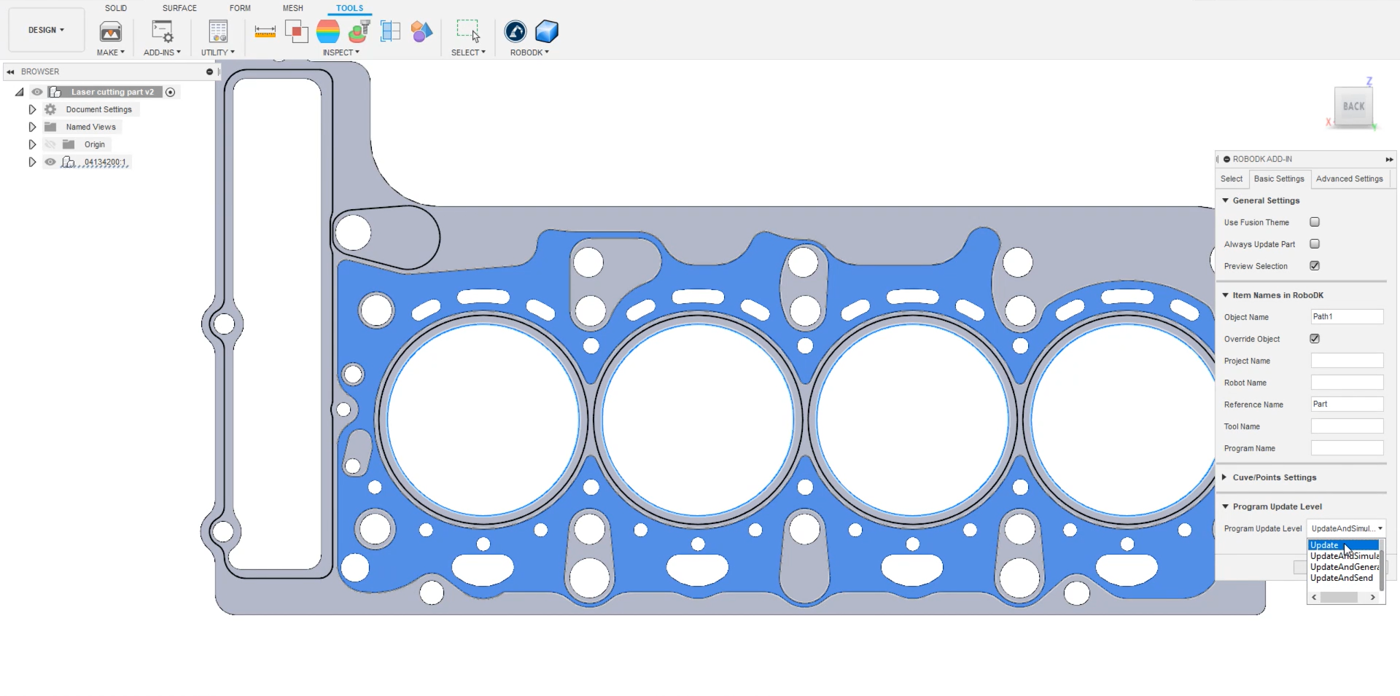
1.같은메뉴에서기본 설정으로 이동합니다.
2.RoboDK를기본동작으로유지하려면퓨전 테마 사용을 선택취소하세요.
3.객체 이름을 입력하여경로의이름을지정합니다. 이예에서는경로1이됩니다.
4.내보낼참조 이름을 입력합니다. 이예제에서는이름이Part로되어있으며, RoboDK 스테이션에서와동일합니다.
5.위이미지와같이프로그램업데이트수준에서업데이트를 선택하면나중에더많은옵션을사용할수있습니다. 이옵션은선택사항입니다.
6.확인을 클릭합니다.
이제 RoboDK에서가져온경로를볼수있을것입니다. 이예제에서는방향이다시잘못되었으므로이전파트에서했던것처럼방향을수정해야합니다.
1.경로를두번클릭합니다(이예에서는
2.열린메뉴에서추가 옵션을 클릭합니다.
3.지오메트리 이동으로 이동하여 X축(하늘색)에 90을입력합니다.
4.이동 적용을 클릭하여오리엔테이션을저장합니다.
다음단계는
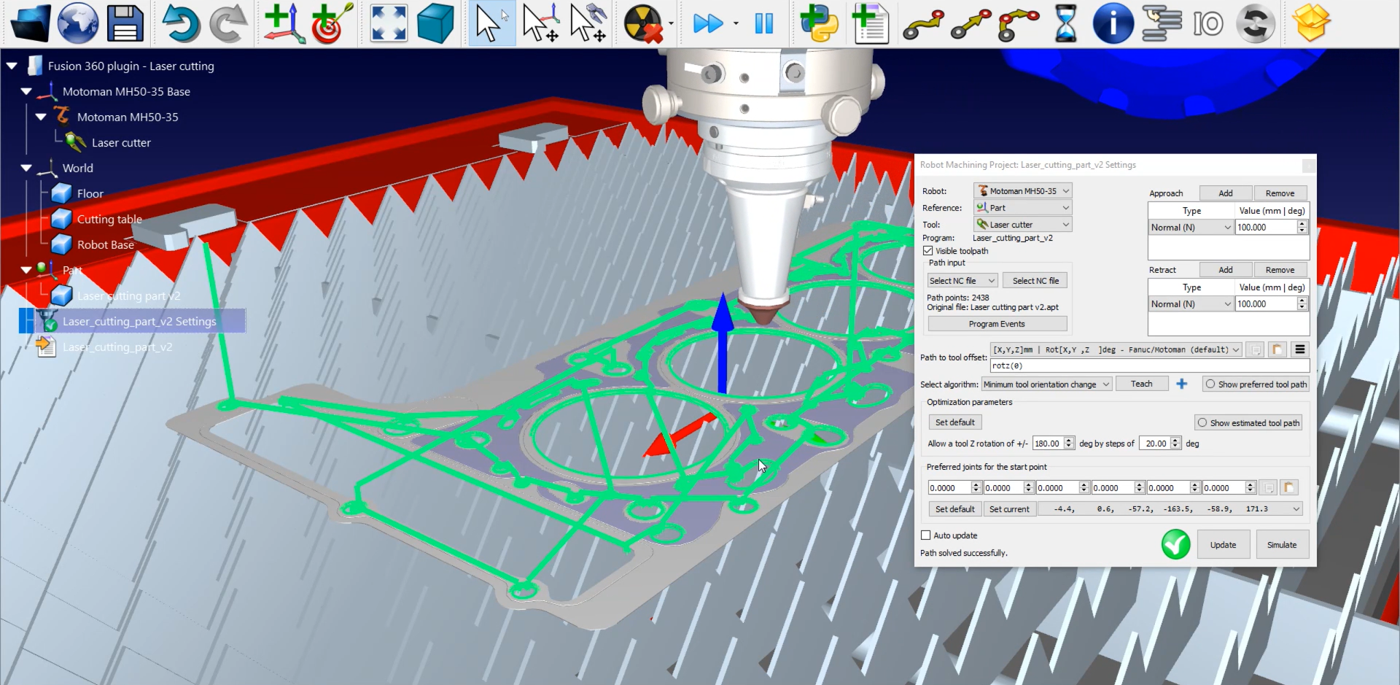
1.여기에서경로설정(
2.로봇, 레퍼런스및도구가올바른것인지확인하세요.
3.커브 선택을 클릭합니다.
4.다른원을선택합니다.
5.
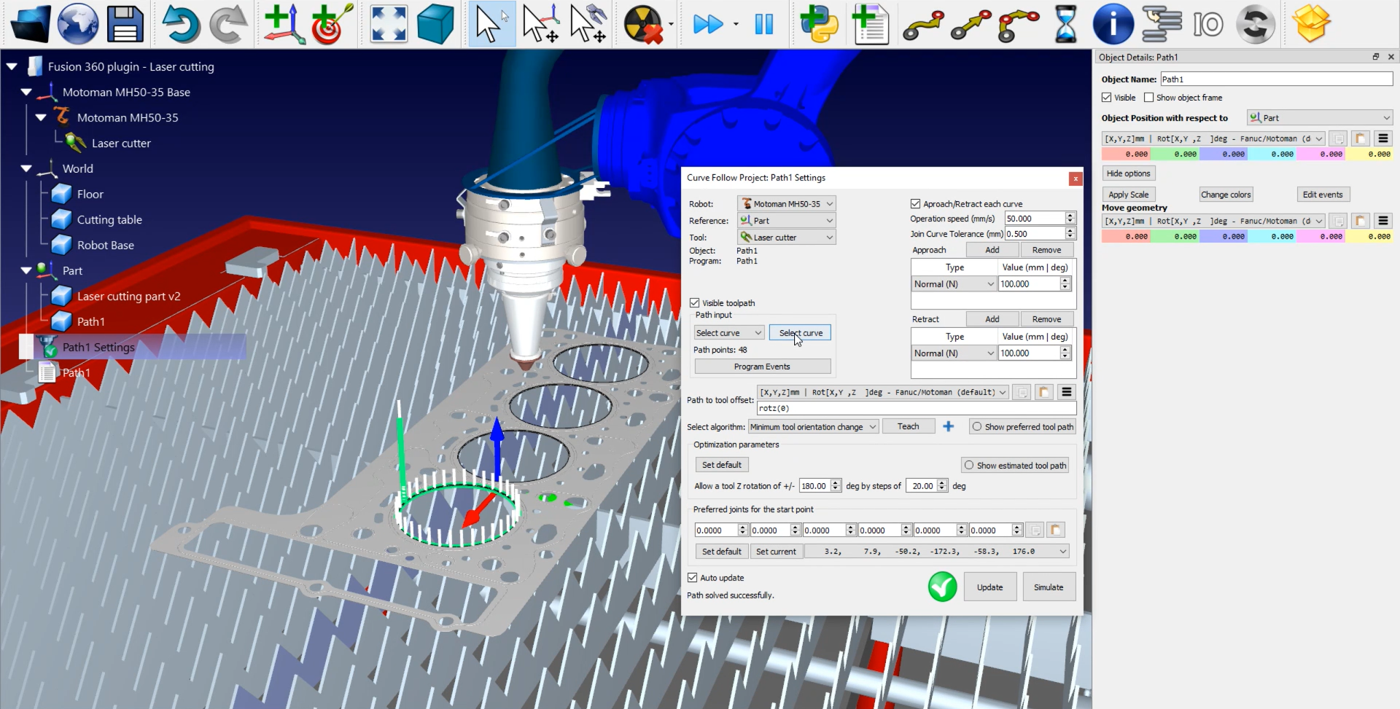
이제접근및후퇴동작의길이가너무길다는것을알수있습니다.
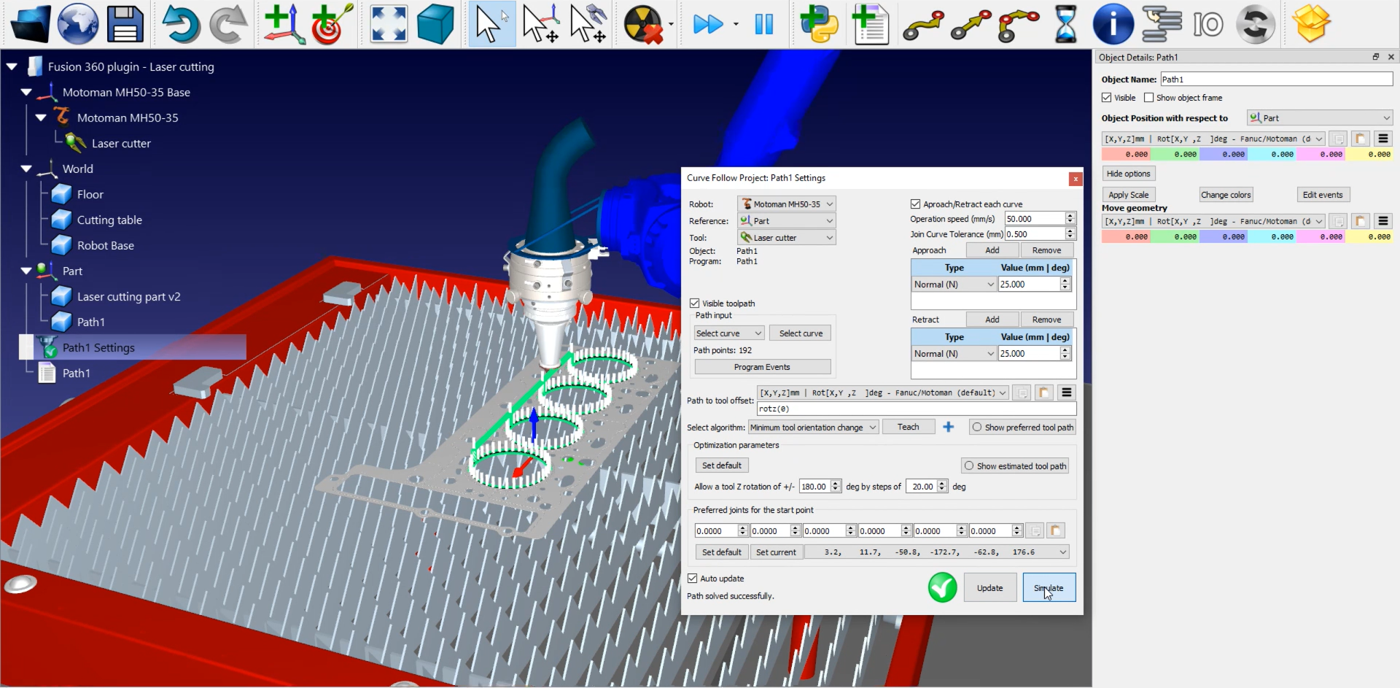
이러한값은다음과같이쉽게수정할수있습니다:
1.여기에서경로설정(
2.접근 및후퇴 상자에더작은값을입력합니다. 이예에서는 25mm를입력할수있습니다.
3.업데이트➔ 시뮬레이션을 클릭합니다.
다음단계는레이저의반경을고려하는것입니다. 이예에서는레이저가너무많은재료를절단하고있습니다.
레이저반경을설정하는방법:
1.Fusion 360으로돌아갑니다.
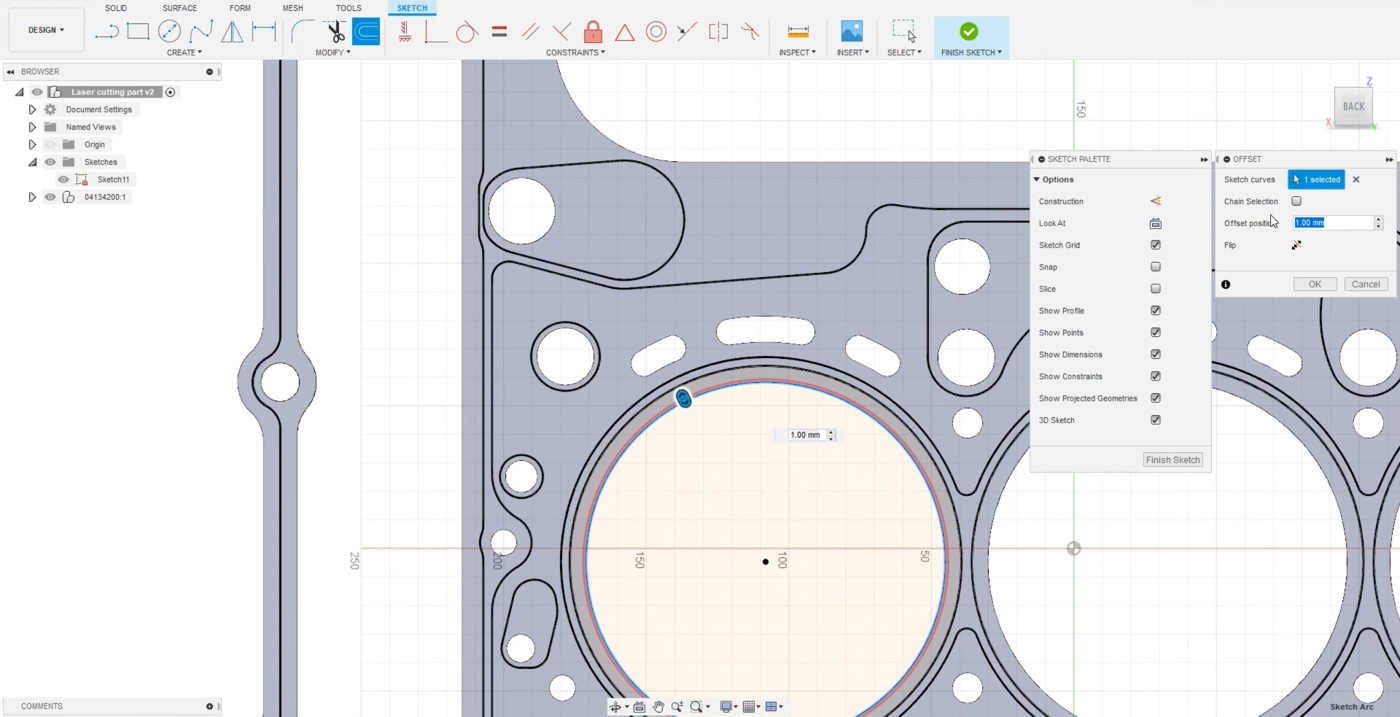
2.솔리드➔ 스케치 만들기 탭으로이동하여스케치를만듭니다.
3.원하나를선택하고상단메뉴에서오프셋을 클릭하여새경로를만듭니다.
4.레이저빔의직경이 2mm인것을고려하면반경은1mm가됩니다. 아래이미지와같이오프셋 위치 상자에 1을입력합니다.
5.다른 3개의원에대해서도이단계를반복합니다.
6.확인을 클릭합니다.
이제커브를 RoboDK에로드할수있습니다.
1.도구 탭으로이동합니다.
2.RoboDK➔ Load Curve(s)를 클릭합니다.
3.커브를 선택하고각원안의스케치를클릭합니다.
4.얼굴을 선택하고도구를일반으로만들려는얼굴을클릭합니다.
5.이예에서객체 이름(기본설정)은 Path2입니다.
6.확인을 클릭하여경로를RoboDK로가져옵니다.
위에서설명한대로경로2의방향을수정할수있습니다. 가까이다가가면두경로의차이를확인할수있습니다. 이제 Path1을삭제할수있습니다.
다음단계는로드한경로섹션이올바른지확인하는것입니다:
1.
2.커브 선택을 클릭하고아래이미지와같이다른원을선택합니다.
3.
위에서설명한대로접근 및후퇴 동작의크기를줄일수있습니다. 이예제에서는25mm를다시입력할수있습니다. 업데이트하는 것을잊지마세요➔ 곡선따라가기프로젝트시뮬레이션 설정을저장합니다. 이파트의다른모든구멍에대해동일한단계를수행할수있습니다.
레이저커팅프로그램을구축하는이방법은 RoboDK의 Fusion 360 플러그인에서작동하지만모든 CAD 플러그인에서도작동합니다.
방법 2: 퓨전 360 레이저 커팅 기능
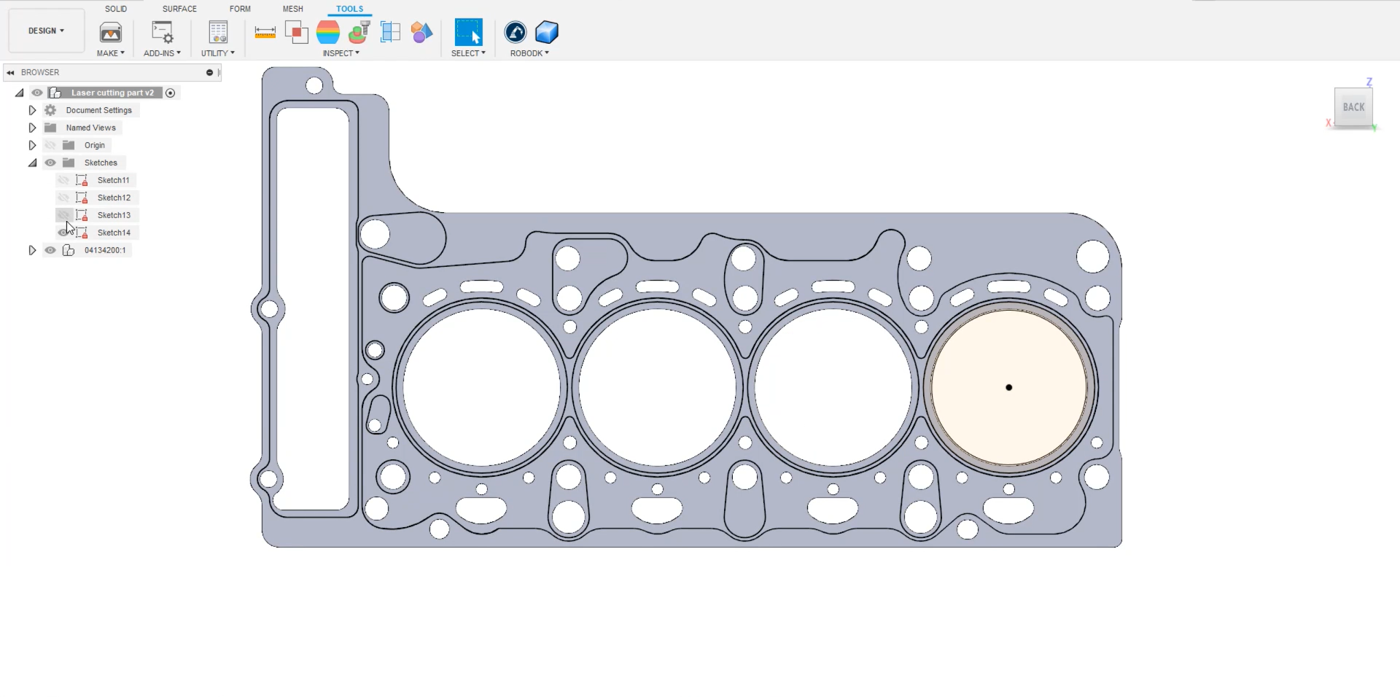
Fusion 360 레이저커팅기능을사용하려면아래이미지와같이Fusion으로돌아가서이전에했던스케치를숨깁니다.
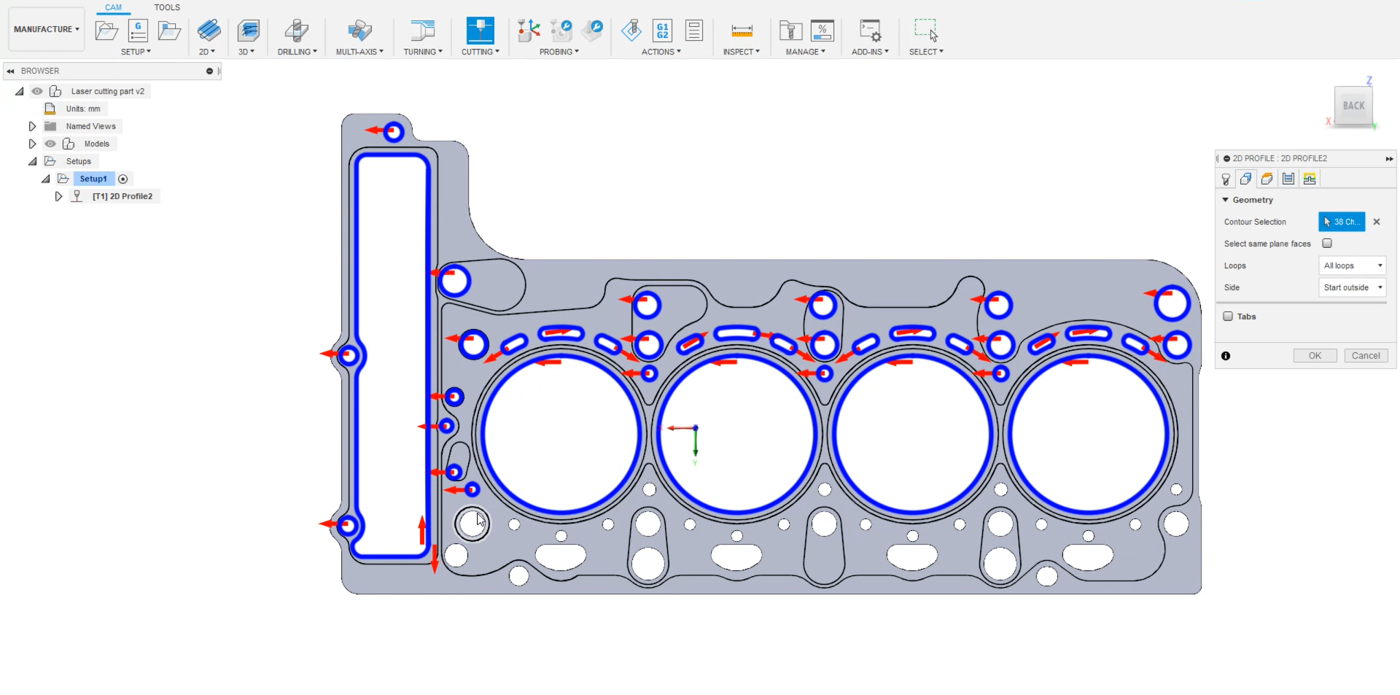
왼쪽상단메뉴의디자인섹션에서제조로 전환합니다. 도구모음에서 2D 커팅기능을클릭합니다.
1.도구를 선택합니다. 이예에서는 1mm 너비의커터입니다.
2.같은메뉴의기하학 탭으로이동하여자르려는원을 선택합니다. 이예에서는아래이미지와같이스탬프가찍힌금속조각의모든구멍이선택되어있습니다.
3.확인을 클릭합니다.
경로를마우스오른쪽버튼으로클릭하고시뮬레이션을 선택하여 Fusion 360에서경로를시뮬레이션할수있습니다. 설정에서모델과동일한원점을사용하고있는지확인합니다. 이렇게하면올바른위치로내보낼수있습니다.
1.설정1➔ 편집을 마우스오른쪽버튼으로클릭합니다.
2.원산지상자에서모델 원산지가 선택되어있는지확인합니다.
3.확인을 선택합니다.
이제Fusion 360 탭에서도구➔ RoboDK에서 CAM 프로젝트 로드를 선택하여스케치를 RoboDK로전송할수있습니다.
RoboDK에가져온스케치가표시되어야합니다. 이예제경로2에서이전경로를삭제해야합니다. 
관리해야할것은프로그램 이벤트뿐입니다:
1.프로그램 이벤트를 클릭합니다.
2.스핀들, 여러공구또는특정 RPM에도달해야하는가공프로젝트를수행하지않으므로처음세개의텍스트상자는비워둡니다.
3.경로시작 상자를선택하고LaserOn을 작성하여경로가시작될때만레이저를활성화합니다.
4.경로 완료 상자를선택하고경로가끝나면비활성화하려면LaserOff를 작성합니다.
5.확인 및업데이트를 클릭합니다.
로봇프로그램을생성하려면
이제 .pg 파일을로봇컨트롤러로전송할준비가되었습니다.