새
이단계에서는 RoboDK에서픽앤플레이스애플리케이션을위한새프로젝트(스테이션이라고도함)를만드는방법을설명합니다.
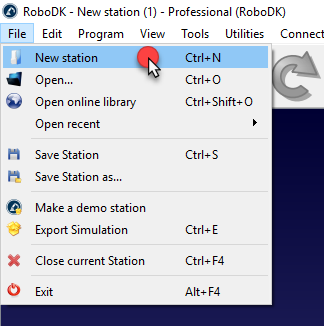
1.RoboDK 열기: 컴퓨터에서 RoboDK 애플리케이션을실행합니다.
2.새스테이션을만듭니다: RoboDK의메인메뉴에서파일-새스테이션을선택하면빈스테이션이작업공간으로새로만들어집니다.
3.라이브러리에서 로봇추가하기
a.로봇을다운로드하려면온라인 로봇 라이브러리를 엽니다.
i.메인메뉴에서파일 → 온라인라이브러리열기를선택합니다.
ii.다양한산업용로봇이표시되는RoboDK 라이브러리 창이열립니다.
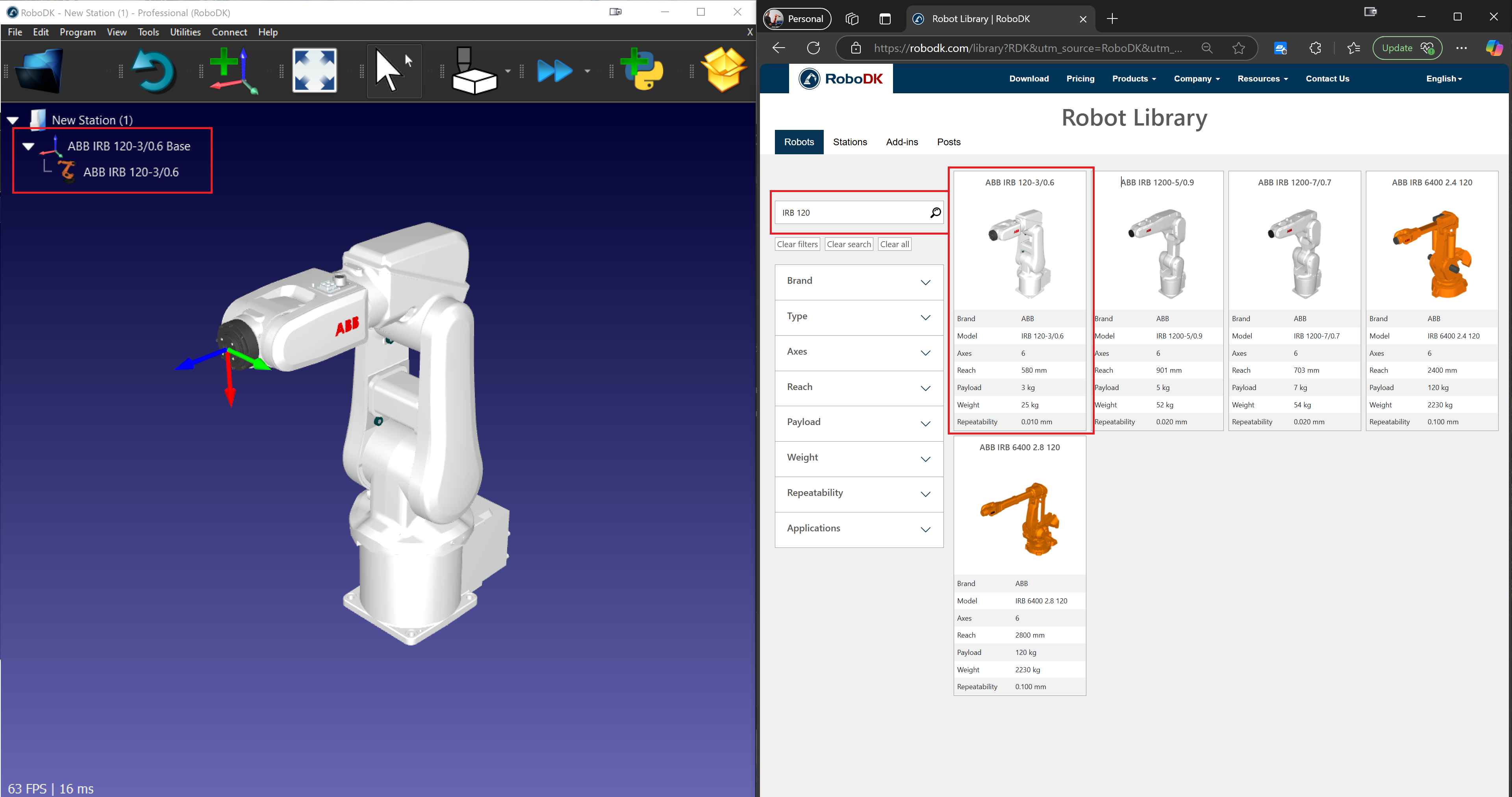
b.로봇을선택하고가져옵니다:
i.검색창을사용하여픽앤플레이스작업에적합한로봇(예: UR10, ABB IRB 120, Fanuc LR Mate)을찾습니다.
ii.원하는로봇을클릭하고다운로드를선택합니다.
c.스테이션에로봇을배치합니다:
i.로봇이자동으로스테이션에나타납니다.
ii.필요한경우이동 도구를 사용하여위치를조정합니다.
4.참조프레임추가하기
a.참조프레임을만듭니다:
i.프로그램 → 참조프레임추가로이동합니다.
ii.스테이션트리와 3D 보기에새기준프레임이나타납니다.
b.기준프레임을배치합니다:
i.참조프레임을두번클릭하여좌표(X, Y, Z) 및회전값을입력합니다.
ii.확인을클릭하여위치를저장합니다.

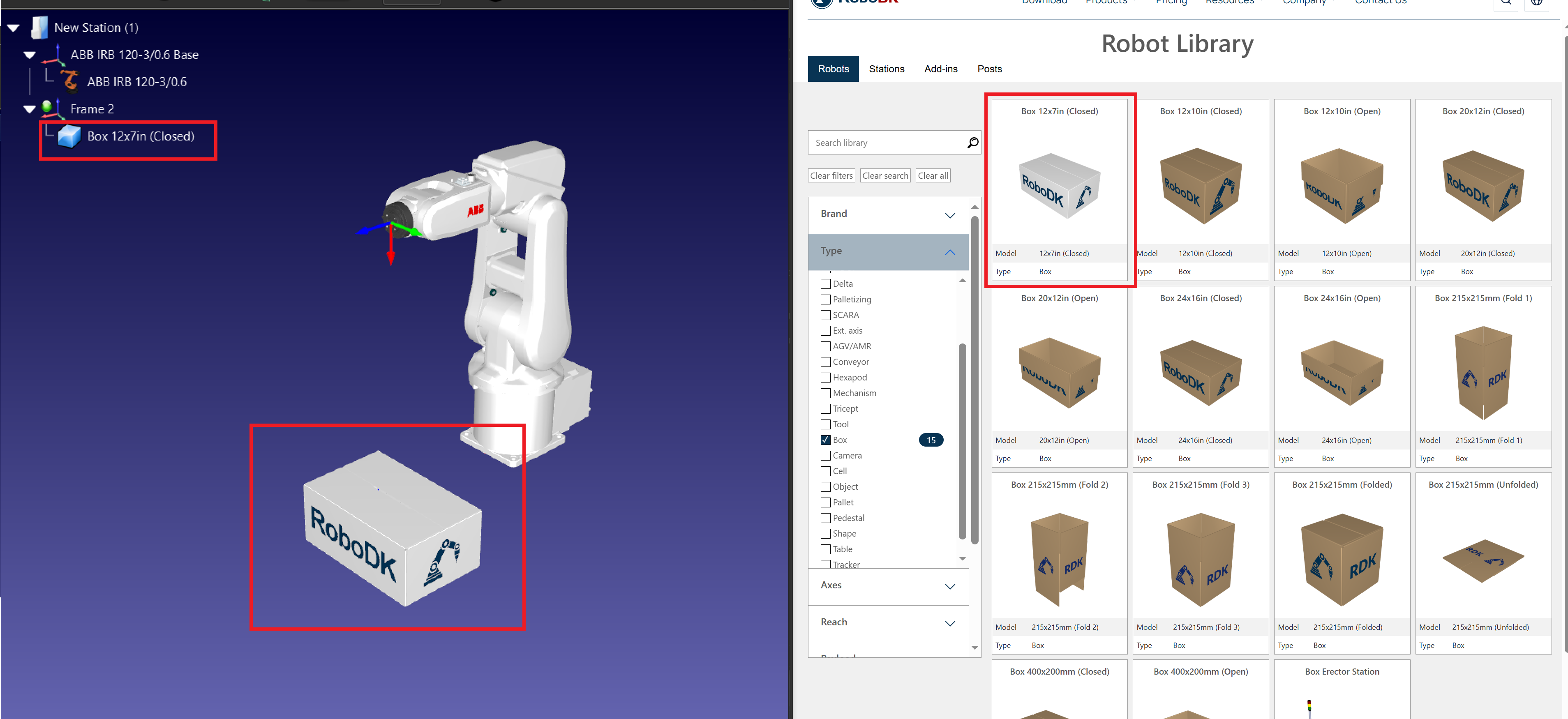
5.3D 오브젝트가져오기
a.오브젝트모델을로드합니다:
iii.메인메뉴에서파일 → 열기를선택합니다.
iv.선택및배치할개체의 3D 모델(예: STEP, IGES 파일)을찾아서선택합니다.
b.개체를배치합니다:
v.이동도구를사용하여기준프레임에서객체배치를조정합니다.
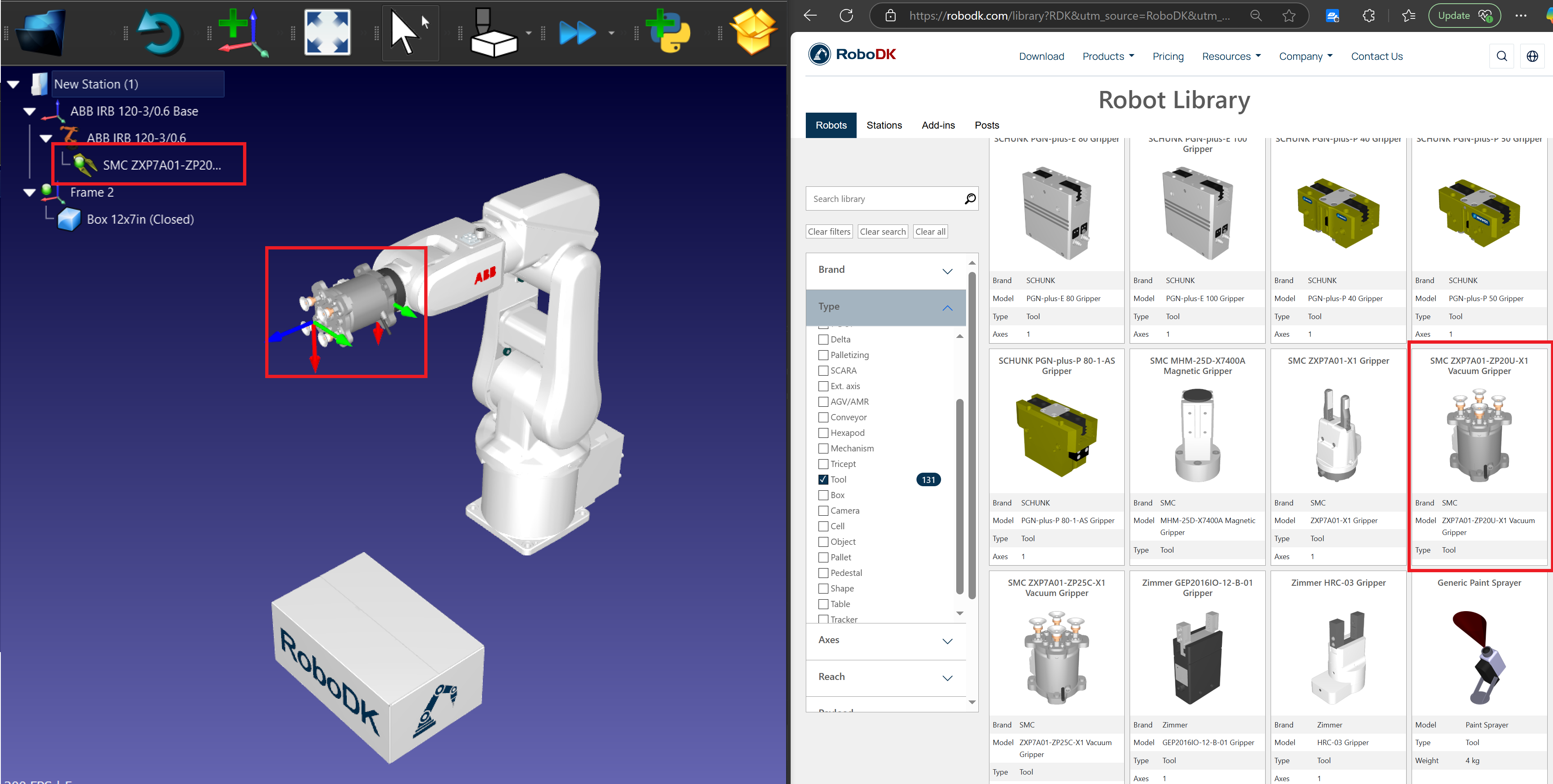
6.도구 추가(그리퍼)
a.그리퍼를선택합니다:
i.메인메뉴에서유틸리티 → 도구추가(TCP)로이동합니다.
ii.로봇 라이브러리에서 그리퍼를선택하거나사용자지정그리퍼파일을가져옵니다.
b.로봇에도구를부착합니다:
i.스테이션트리에서그리퍼를마우스오른쪽버튼으로클릭하고로봇에부착을선택합니다.
ii.적절한로봇플랜지를선택합니다.
c.TCP(공구중심점)를정의합니다: 도구를두번클릭하고로봇플랜지를기준으로 TCP 좌표를입력합니다.