픽
다음단계에따라 RoboDK에서픽앤플레이스애플리케이션을위한기본대상을생성합니다.
7.대상지정및배치추가:
a.로봇을원하는픽위치로이동합니다.
b.프로그램 → 대상가르치기를선택하여위치를저장합니다.
c.선택, 선택 후퇴, 배치, 배치 후퇴 위치에대해반복합니다.
8.대상을정리합니다:
a.명확성을위해대상의이름을바꿉니다(예: 접근_선택, 선택, 장소). F2 키를눌러대상의이름을변경합니다.
b.스테이션트리의관련참조프레임아래에타겟을생성하는것을잊지마세요.
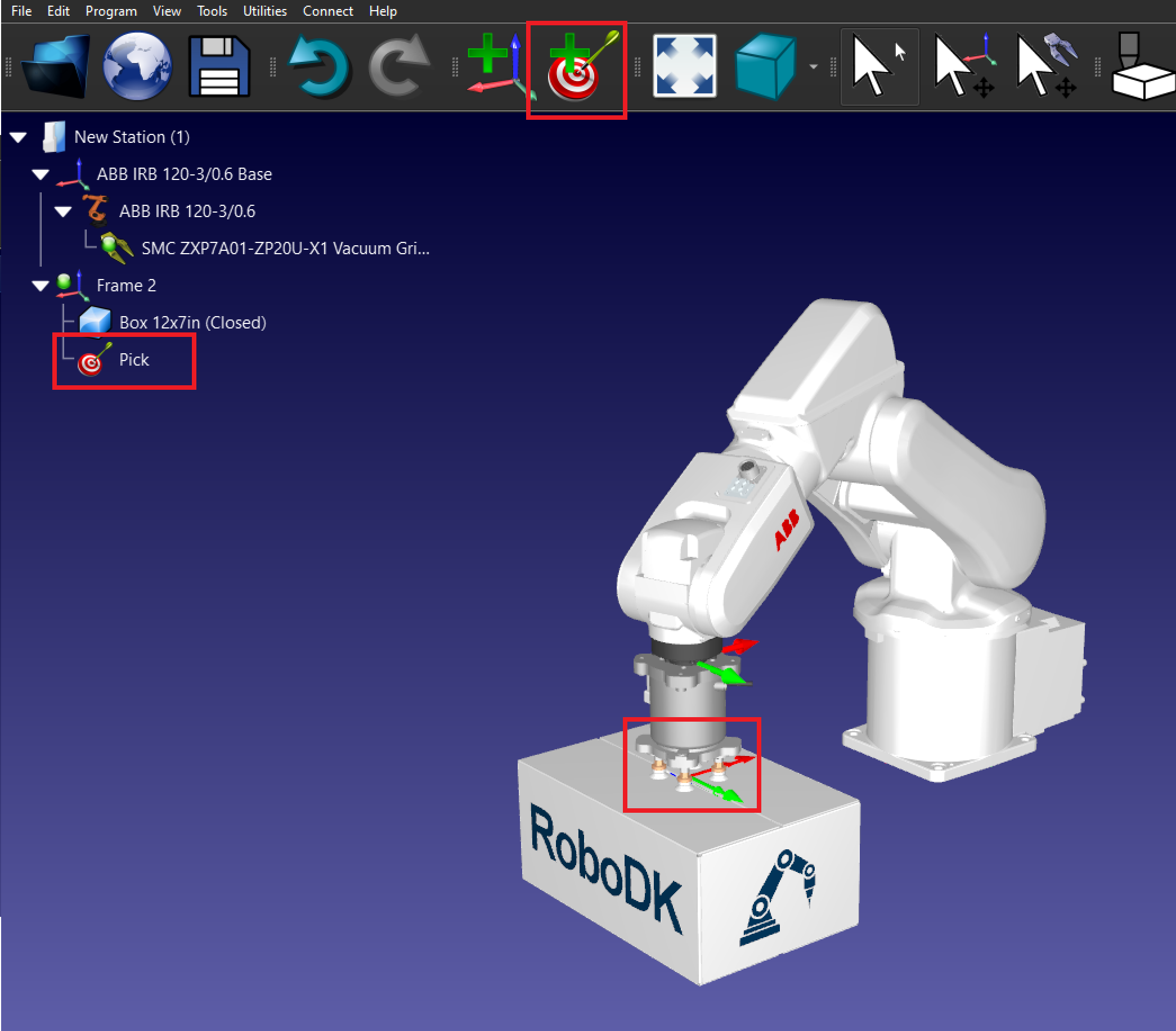
9.선택대상을만듭니다: 로봇을상자위에놓고 Pick이라는대상을만듭니다.
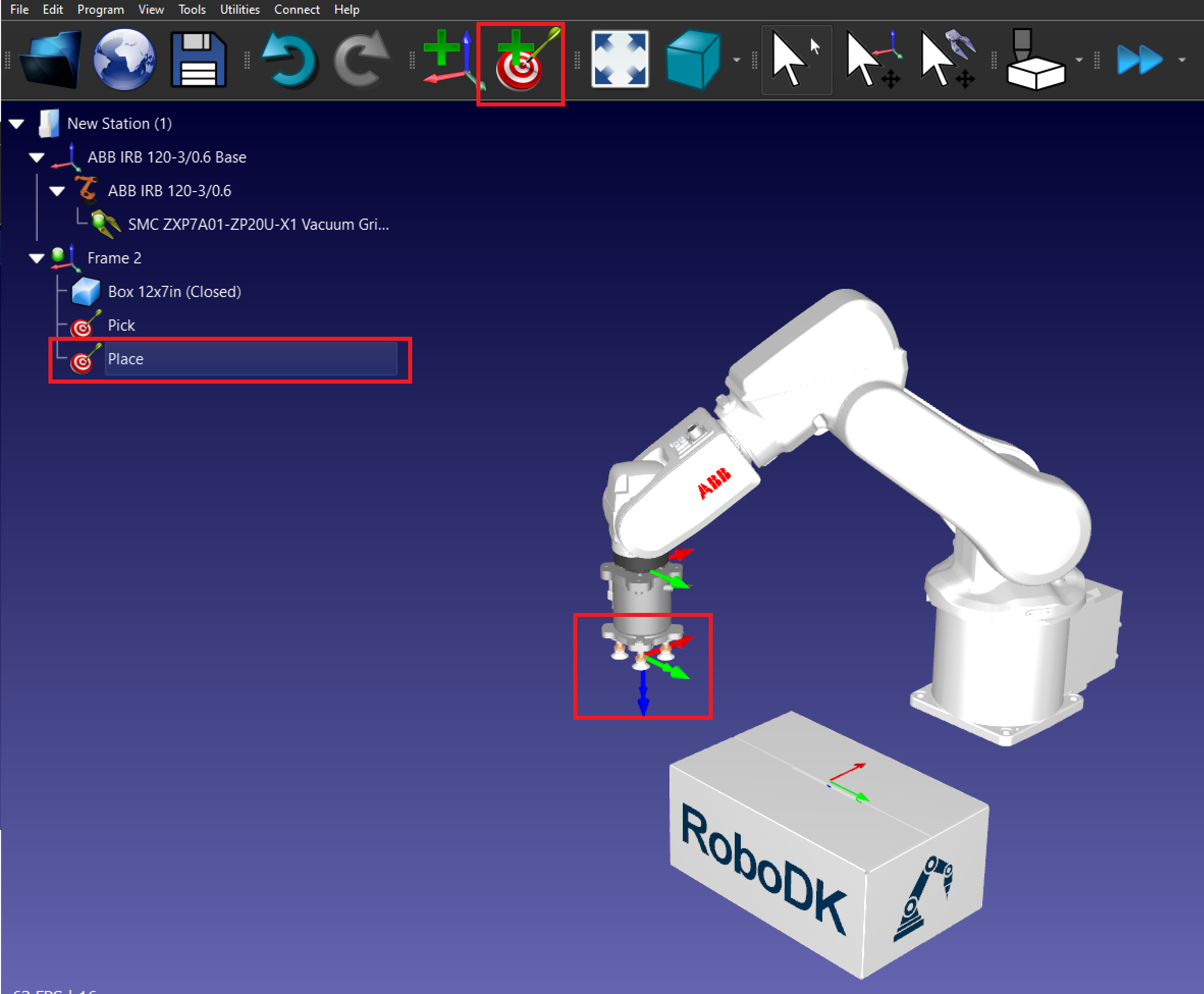
10.배치대상을만듭니다: 상자를배치할위치로로봇을이동하고배치라는대상을만듭니다.
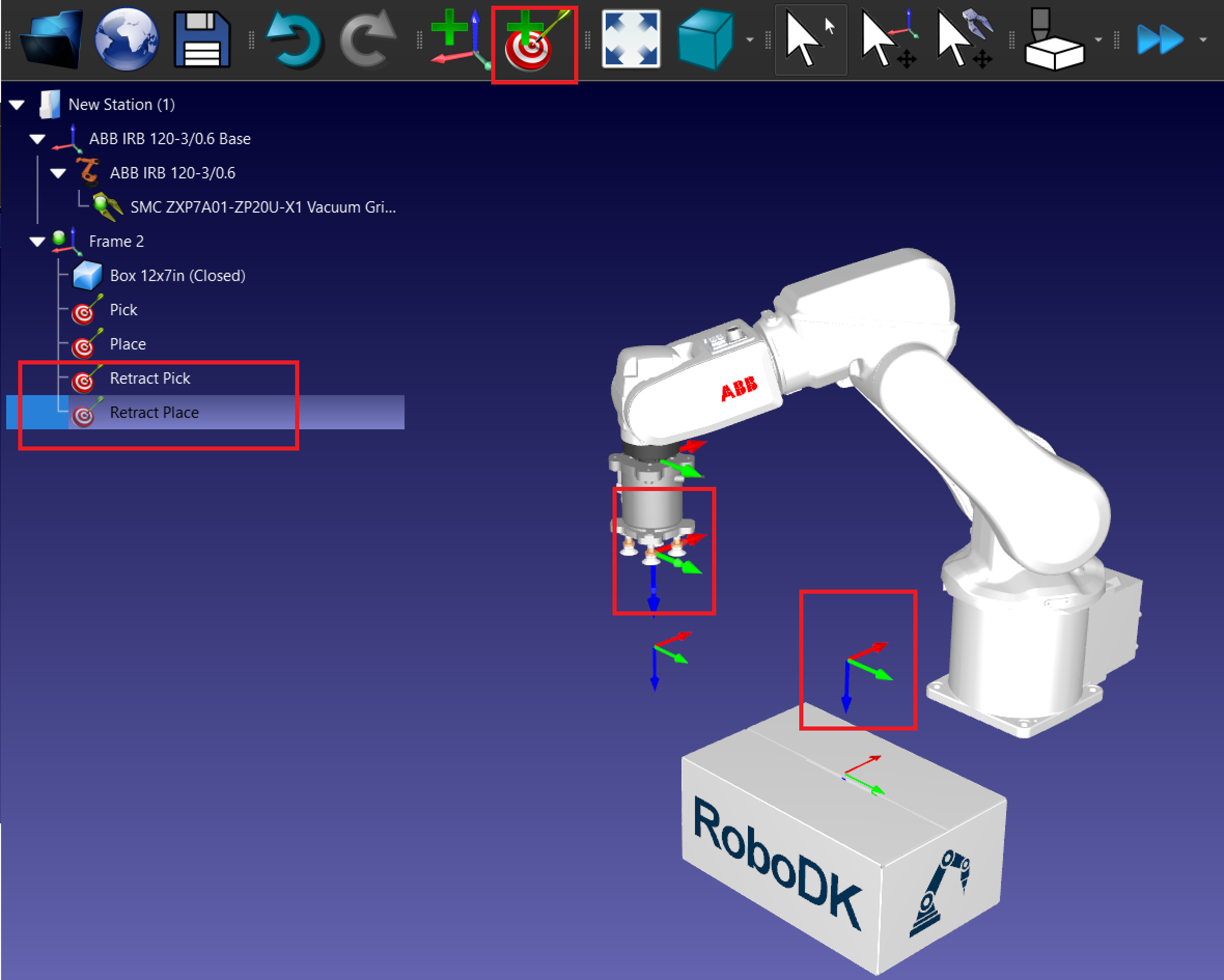
11.리트랙트타겟을만듭니다:
a.로봇을선택대상과 Z축에서위로이동합니다.
b.선택후퇴라는새대상을만듭니다.
c.장소대상에대해반복합니다.