픽
다음단계에따라진공그리퍼를사용하여6축로봇팔로상자를이동하는기본픽앤플레이스프로그램을 RoboDK에서만들수있습니다.
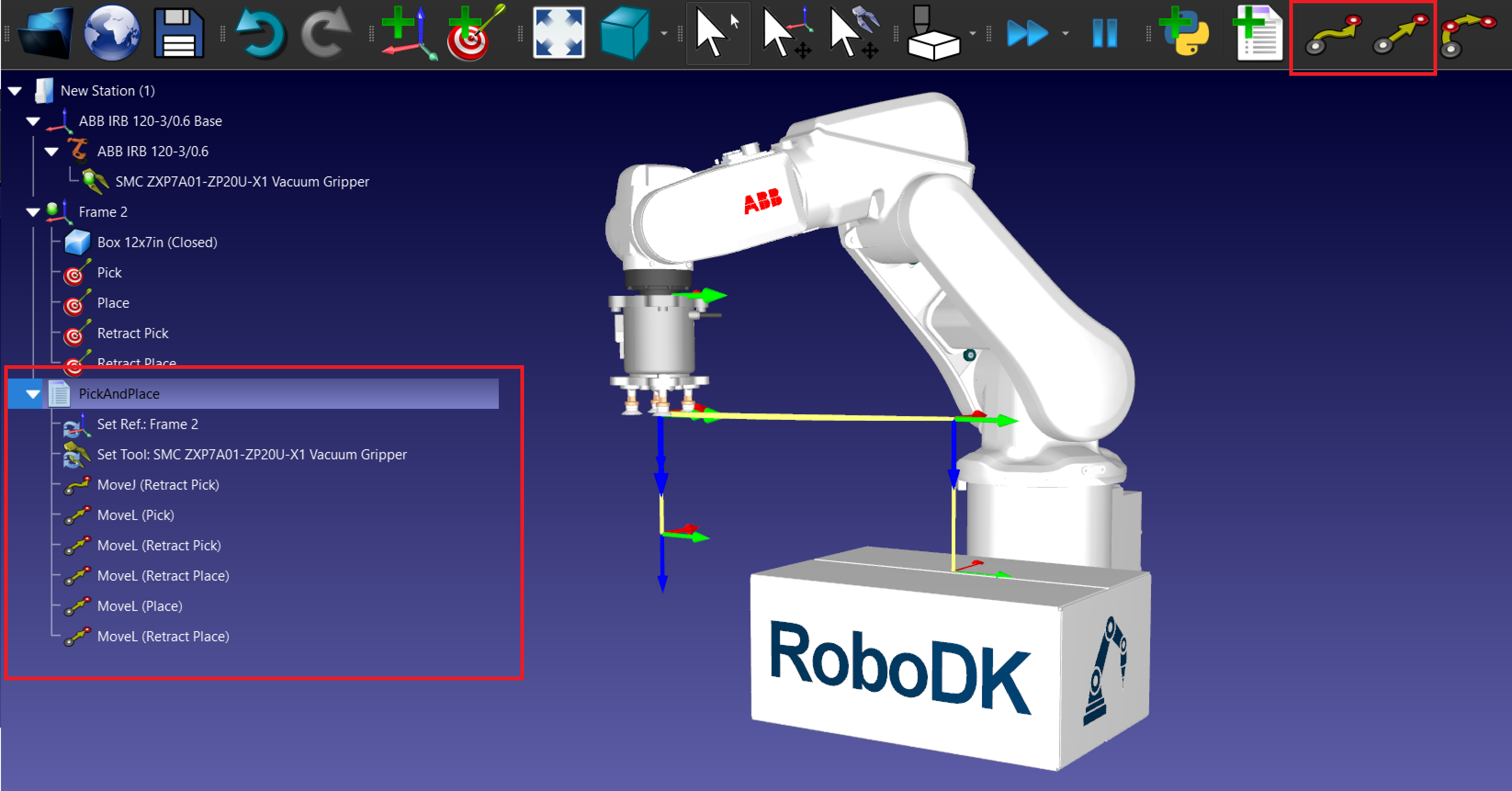
1.픽 앤플레이스작업프로그래밍 :
a.새프로그램을만듭니다: 프로그램 → 프로그램추가로이동하여 PickAndPlace로이름을지정합니다.
b.이동지침을추가합니다:
i.각대상에대해 MoveJ 또는 MoveL 명령을추가합니다.
ii.로봇을먼저후퇴타깃으로이동한다음픽타깃으로이동한다음다시후퇴로이동하는 MoveL을생성합니다.
iii.장소대상에대해반복합니다.
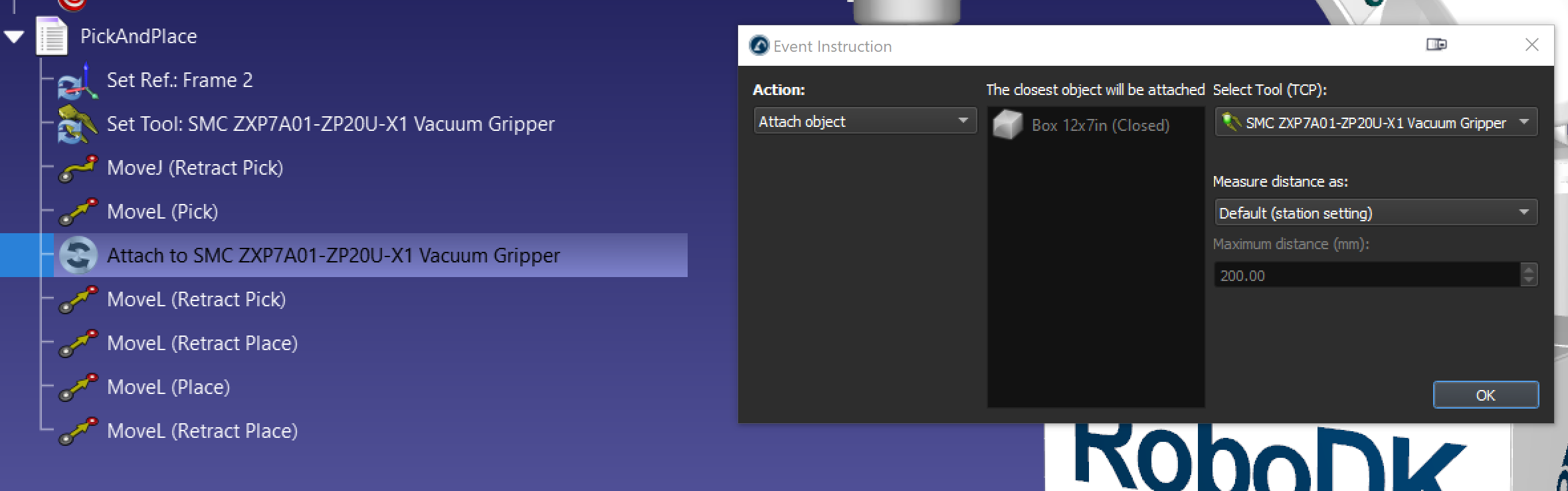
2.이벤트를추가하여개체를선택하고배치합니다.
a.이벤트를추가하려면프로그램 → 시뮬레이션이벤트지침으로이동합니다.
b.MoveL(선택) 뒤에상자를선택하는객체 첨부 동작으로이벤트를추가합니다.
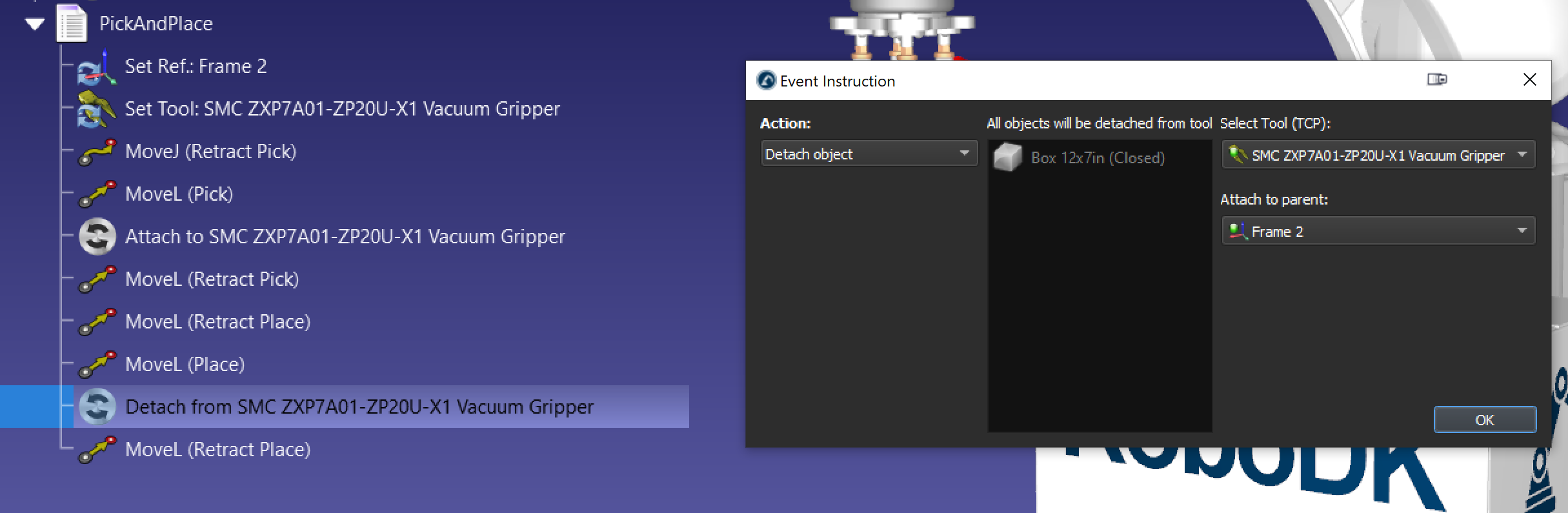
c.객체 분리 동작으로이벤트를추가하고 MoveL(놓기) 뒤에상자를놓습니다. 부모에 첨부 옵션을사용하면그리퍼에서분리된개체를새개체에첨부할수있습니다.
d.필요한경우상자를원래위치로초기화하는개체 위치 설정 이벤트동작을사용하여별도의프로그램을만드는것도좋은방법입니다.
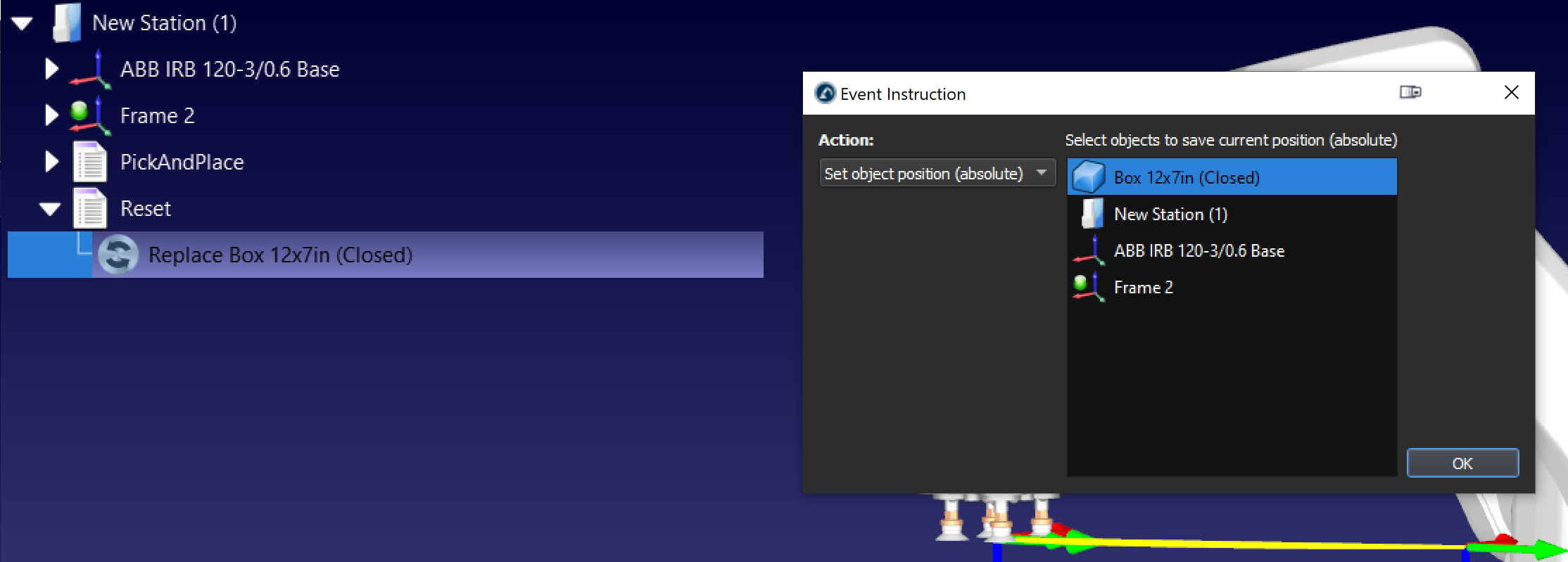
다음단계를수행하면 RoboDK에서기본 픽 앤 플레이스 스테이션을 성공적으로만들수있습니다.